应用案例 | 基于三维机器视觉的自动化无序分拣解决方案

?
近年来,电商行业蓬勃发展,订单的海量化、订单类型的碎片化,使物流行业朝着“多品种、无边界、分类广”的方向迅速发展。根据许多研究机构的预测,电子商务销售额预计将以每年两位数的速度增长,推动整个行业的规模不断扩大。
物流分拣一直是一项单调乏味的体力活,长期以来存在着招工难的问题。再加上人口老龄化的加剧,未来物流行业将面临用工短缺和人力成本上升等挑战,这些问题会愈演愈烈。
无论是人工分拣还是传统的自动化设备,都无法满足日益庞大且繁杂的物流订单。因此,智能化转型升级已经成为必然趋势。
Part.1?项目背景
一家重要的物流企业急需进行自动化分拣改造,特别是在铝合金物料分拣线方面。这条分拣线所处理的铝合金物料来自20多种不同规格,呈混乱状态铺放,而且体积较小,每个物料的重量都不超过1kg。
这样的复杂环境通过高效的自动化分拣系统,能够应对不同规格、混乱布局和小尺寸、轻量级的物料,帮助企业实现降本增效的目的。

Part.2?项目需求
该物流公司在进行物料分拣时,需要通过视觉设备识别铝合金物料的不同规格,并将物料分类,放置在对应的料框中。由于物料体积较小,且规格不一,排列无序,且来料数量多,对分拣要求较为苛刻。
因此,需要一个高度精密的系统,能够准确、迅速地识别物料,并在混乱无序的情况下将它们准确的归类分拣,满足企业的要求。

Part.3?项目痛点
传统的人工分拣方式因为耗时耗力,效率低、错误率高等缺陷而受到限制。对于物流公司来说,特别是对于来料众多的公司而言,人工分拣不仅无法满足公司的高效分拣需求,还耗费大量人工成本。
目前常用的视觉设备在进行检测分拣时主要侧重于读取物料的平面数据并进行检测分拣。而对于体积相近但规格各异的铝合金物料来说,使用这种方式容易出现检测误差。
Part.4?解决方案
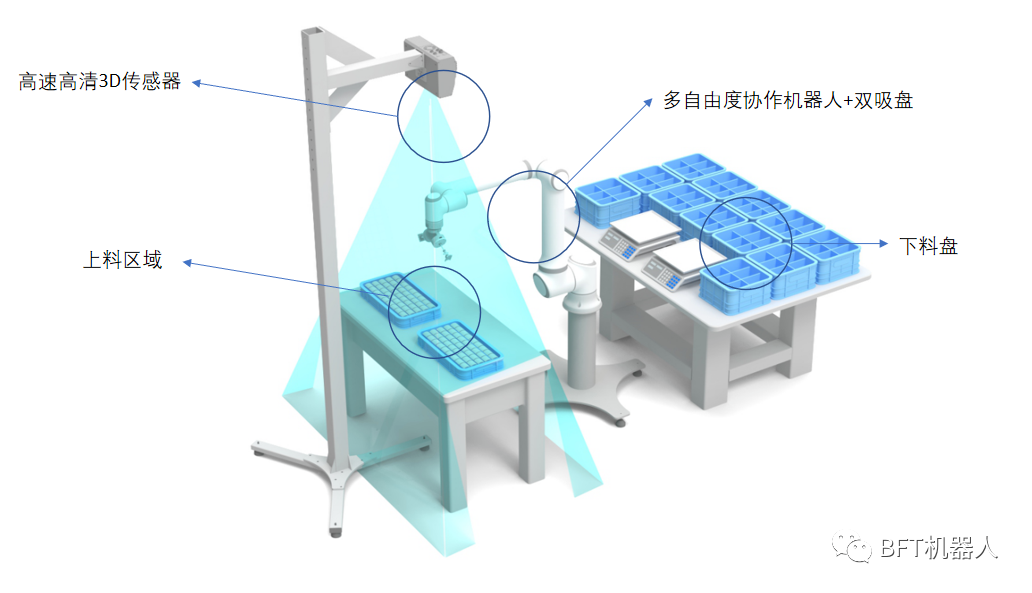
由三维视觉设备、传感器、多自由度协作机器人组成的自动化无序分拣系统,能够实现高效的铝合金物料无序抓取。
操作过程中,操作工人首先将需要识别的铝合金物料放置在上料区,随后由高清三维视觉传感器采集物料的三维数据信息。通过视觉识别算法,系统能够准确识别不同规格的物料,并输出相应的抓取点坐标。这些坐标通过与机器人通讯,接收抓取点坐标,触发机器人执行准确的抓取操作。
Part.5?项目布局
Part.6?通讯协议

Part.7?项目优势
1.高速识别,精准抓取。针对物料体积小、差别细微、种类繁多的难点,三维视觉产品可实现高速识别,精准分类,并传递给机器人稳定抓取,性能稳定。
2.精准规划轨迹,自动避障。由于高速分拣时容易出现碰撞、剐蹭、上双等问题,基于三维视觉的自动化无序分拣系统可实时规划机器人运动轨迹,自动躲避障碍物,避免异常情况的发生。
3.操作便捷。基于三维视觉的自动化无序分拣系统搭载自研可视化机器人控制面板,无需学习机器人编程语言,仅需按照面板提示进行设置操作即可使用,即便是新手也能轻松操作。
4.降低成本。通过使用该系统,能够让机器人替代人工,完成枯燥且劳动量大的铝合金物料分拣工作,仅需操作人员将物料放在上料台即可。且分拣工作由机器人自动完成,无须人工监督。
5.可持续工作,增加效益。基于三维视觉的自动化无序分拣系统可实现24小时连轴运作,且分拣速度快、效率高、错误率低,能够达到降本增效的目标。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 2024年单片机毕业设计选题物联网计算机电气电子类
- HA启动Advanced SSH & Web Terminal 提示附加组件似乎尚未准备就绪,它可能仍在启动。是否要再试一次?
- 废话篇1:认识树莓派
- Conda python管理packages一 从入门到精通
- 硬件位置比较输出和编码器锁存:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(六)
- 基于Java SSM框架实现咖啡馆管理系统项目【项目源码+论文说明】计算机毕业设计
- API测试| 了解API接口测试| API接口测试指南
- Adobe Premier及PrElements各版本安装指南
- Python私有变量的定义与访问
- 04-Nacos微服务注册中心--集群部署和配置中心