Arduino中使用库函数方式控制步进电机
发布时间:2023年12月26日
目录
2、使用runToNewPosition函数控制电机绝对位置方式运动
步进电机介绍和接线都有介绍。
关于AccelStepper类讲解的其它参考博客
一、编译器中库添加
1、添加库
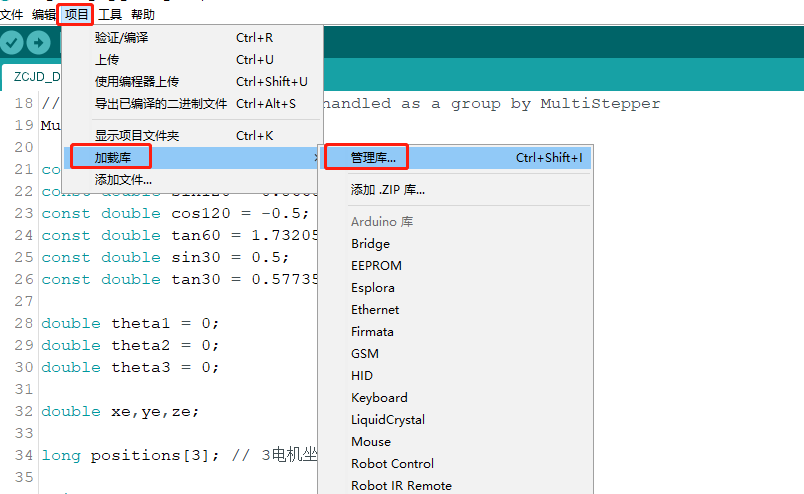
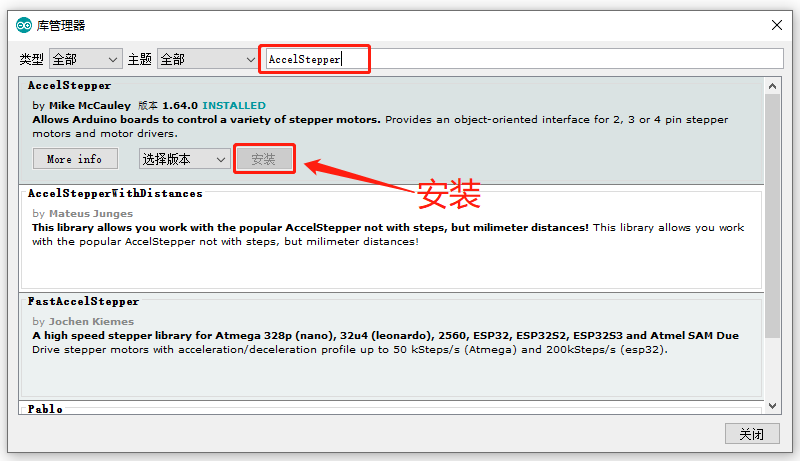
2、安装AccelStepper
在库管理器中搜索AccelStepper、点击安装,安装完成后重新启动编译器。
3、新的程序工程中添加头文件使用
#include <AccelStepper.h>
#include <MultiStepper.h>
二、步进电机单轴控制方式
1、类和库函数介绍
使用AccelStepper类控制多个步进电机。多个电机控制,就是使用多个AccelStepper实例化对象去控制。
停止
stepper.stop();
/*库函数说明
* setMaxSpeed ----------设置步进电机最大运行速度
* setAcceleration ------设置步进电机加速度
* setSpeed--------------设置步进电机运行速度
* targetPosition--------获取步进电机运行目标位置
* currentPosition ------获取步进电机运行当前位置
* setCurrentPosition----复位步进电机初始位置
* move------------------设置步进电机运动的相对目标位置
* moveTo----------------设置步进电机运动的绝对目标位置
* run-------------------步进电机运行(先加速后减速模式)
* runSpeed--------------步进电机运行(匀速模式)
* runToNewPosition------电机运行到用户指定位置值,目标位置为绝对位置。此函数将“block”程序运行。即电机没有到达目标位置前,Arduino将不会继续执行后续程序内容。这一点很像Arduino官方Stepper库中的step函数。
*/2、使用runToNewPosition函数控制电机绝对位置方式运动
(1)实现功能
电机先转3圈、再回到零位。如此往复。
(2)代码
#include <AccelStepper.h>
#include <MultiStepper.h>
#define STEPPER1_DIR_PIN 6
#define STEPPER1_STEP_PIN 7
#define STEPPER2_DIR_PIN 8
#define STEPPER2_STEP_PIN 9
#define Ena_PIN 10 //使能位为引脚10。(低电平电机禁止运动,高电平电机有效)
AccelStepper stepper1(AccelStepper::DRIVER, STEPPER1_STEP_PIN, STEPPER1_DIR_PIN); // 配置电机1 的脉冲引脚 方向引脚
AccelStepper stepper2(AccelStepper::DRIVER, STEPPER2_STEP_PIN, STEPPER2_DIR_PIN); // 配置电机2 的脉冲引脚 方向引脚
#define CIRCLE_Puls 1600 //电机旋转一圈的脉冲数
long positions[2]; //2个电机坐标位置
/*库函数说明
* setMaxSpeed ----------设置步进电机最大运行速度
* setAcceleration ------设置步进电机加速度
* setSpeed--------------设置步进电机运行速度
* targetPosition--------获取步进电机运行目标位置
* currentPosition ------获取步进电机运行当前位置
* setCurrentPosition----复位步进电机初始位置
* move------------------设置步进电机运动的相对目标位置
* moveTo----------------设置步进电机运动的绝对目标位置
* run-------------------步进电机运行(先加速后减速模式)
* runSpeed--------------步进电机运行(匀速模式)
* runToNewPosition------电机运行到用户指定位置值,目标位置为绝对位置。此函数将“block”程序运行。即电机没有到达目标位置前,Arduino将不会继续执行后续程序内容。这一点很像Arduino官方Stepper库中的step函数。
*/
void setup()
{
//
Serial.begin(9600);
//
pinMode(Ena_PIN, OUTPUT);
digitalWrite(Ena_PIN, 1);
//
stepper1.setMaxSpeed(CIRCLE_Puls*1.5); //设置1#电机最大速度
stepper1.setSpeed(CIRCLE_Puls*1.0); //设置1#电机速度
stepper1.setAcceleration(CIRCLE_Puls/4); //设置1#电机加速度
stepper2.setMaxSpeed(CIRCLE_Puls*1.5);
stepper2.setSpeed(CIRCLE_Puls*1.0);
stepper2.setAcceleration(CIRCLE_Puls/4);
delay(1000);
}
void loop()
{
/*================1、绝对位置运动1---向前转3圈=============================*/
//设置电机的目标位置
positions[0] = CIRCLE_Puls*3;
positions[1] = CIRCLE_Puls*3;
stepper1.runToNewPosition(positions[0]);
//串口反馈1#电机当前的位置
Serial.print("1# Motor Current Position is: ");
Serial.println(stepper1.currentPosition());
delay(2000);
/*================2、绝对位置运动2---到零位=============================*/
//设置电机的目标位置
positions[0] = CIRCLE_Puls*0;
positions[1] = CIRCLE_Puls*0;
stepper1.runToNewPosition(positions[0]);
//串口反馈1#电机当前的位置
Serial.print("1# Motor Current Position is: ");
Serial.println(stepper1.currentPosition());
delay(2000);
}(3)运行效果
根据设置的加速度,速度以梯形曲线方式进行加减速运动。启动和停止相对来说比较柔和。
绝对位置方式转3圈
绝对位置方式回到零位

3、增量式运动、绝对式位置运动
(1)代码
#include <AccelStepper.h>
#include <MultiStepper.h>
#define STEPPER1_DIR_PIN 6
#define STEPPER1_STEP_PIN 7
#define STEPPER2_DIR_PIN 8
#define STEPPER2_STEP_PIN 9
#define Ena_PIN 10 //使能位为引脚10。(低电平电机禁止运动,高电平电机有效)
AccelStepper stepper1(AccelStepper::DRIVER, STEPPER1_STEP_PIN, STEPPER1_DIR_PIN); // 配置电机1 的脉冲引脚 方向引脚
AccelStepper stepper2(AccelStepper::DRIVER, STEPPER2_STEP_PIN, STEPPER2_DIR_PIN); // 配置电机2 的脉冲引脚 方向引脚
#define CIRCLE_Puls 1600 //电机旋转一圈的脉冲数
long positions[2]; //2个电机坐标位置
/*库函数说明
* setMaxSpeed ----------设置步进电机最大运行速度
* setAcceleration ------设置步进电机加速度
* setSpeed--------------设置步进电机运行速度
* targetPosition--------获取步进电机运行目标位置
* currentPosition ------获取步进电机运行当前位置
* setCurrentPosition----复位步进电机初始位置
* move------------------设置步进电机运动的相对目标位置
* moveTo----------------设置步进电机运动的绝对目标位置
* run-------------------步进电机运行(先加速后减速模式)
* runSpeed--------------步进电机运行(匀速模式)
* runToNewPosition------电机运行到用户指定位置值,目标位置为绝对位置。此函数将“block”程序运行。即电机没有到达目标位置前,Arduino将不会继续执行后续程序内容。这一点很像Arduino官方Stepper库中的step函数。
*/
void setup()
{
//
Serial.begin(9600);
//
pinMode(Ena_PIN, OUTPUT);
digitalWrite(Ena_PIN, 1);
//
stepper1.setMaxSpeed(CIRCLE_Puls*1.5); //设置1#电机最大速度
stepper1.setSpeed(CIRCLE_Puls*1.0); //设置1#电机速度
stepper1.setAcceleration(CIRCLE_Puls); //设置1#电机加速度
stepper2.setMaxSpeed(CIRCLE_Puls*1.5);
stepper2.setSpeed(CIRCLE_Puls*1.0);
stepper2.setAcceleration(CIRCLE_Puls/4);
delay(1000);
}
void loop()
{
//1、增量式运动---2秒运行一次
//stepper1.move(CIRCLE_Puls*4);
//stepper1.runToPosition();
//delay(2000);
//2、绝对位置运动--2秒运行一次
stepper1.moveTo(CIRCLE_Puls*4);
stepper1.runToPosition();
delay(2000);
stepper1.moveTo(CIRCLE_Puls*0);
stepper1.runToPosition();
delay(2000);
}三、步进电机多个电机一起控制方式
如果是多个电机,不想用AccelStepper实例化对象对多个电机 一个个控制。可以使用MultiStepper类来进行控制。需要添加头文件#include <MultiStepper.h>
1、MultiStepper使用方法
(1)添加引用#include <MultiStepper.h>头文件
(2)定义一个MultiStepper对象,将多个步进电机的AccelStepper 实例化对象添加到MultiStepper实例化对象中。
实例化对象定义
AccelStepper stepper1(AccelStepper::DRIVER, STEPPER1_STEP_PIN, STEPPER1_DIR_PIN); // 配置电机1 的脉冲引脚 方向引脚
AccelStepper stepper2(AccelStepper::DRIVER, STEPPER2_STEP_PIN, STEPPER2_DIR_PIN); // 配置电机2 的脉冲引脚 方向引脚
MultiStepper steppers;添加
steppers.addStepper(stepper1);
steppers.addStepper(stepper2);(3)执行运动。只能以恒速运动的方式,运行到给定的绝对位置。
//电机运行执行
steppers.moveTo(positions);
steppers.runSpeedToPosition();2、代码
#include <AccelStepper.h>
#include <MultiStepper.h>
#define STEPPER1_DIR_PIN 6
#define STEPPER1_STEP_PIN 7
#define STEPPER2_DIR_PIN 8
#define STEPPER2_STEP_PIN 9
#define Ena_PIN 10 //使能位为引脚10。(低电平电机禁止运动,高电平电机有效)
AccelStepper stepper1(AccelStepper::DRIVER, STEPPER1_STEP_PIN, STEPPER1_DIR_PIN); // 配置电机1 的脉冲引脚 方向引脚
AccelStepper stepper2(AccelStepper::DRIVER, STEPPER2_STEP_PIN, STEPPER2_DIR_PIN); // 配置电机2 的脉冲引脚 方向引脚
MultiStepper steppers;
#define CIRCLE_Puls 1600 //电机旋转一圈的脉冲数
long positions[2]; //2个电机坐标位置
void setup()
{
//
Serial.begin(9600);
//
pinMode(Ena_PIN, OUTPUT);
digitalWrite(Ena_PIN, 1);
//
stepper1.setMaxSpeed(CIRCLE_Puls*1.5); //设置1#电机最大速度
stepper1.setSpeed(CIRCLE_Puls*1); //设置1#电机速度
stepper1.setAcceleration(CIRCLE_Puls/4); //设置1#电机加速度
stepper2.setMaxSpeed(CIRCLE_Puls*1.5);
stepper2.setSpeed(CIRCLE_Puls*1);
stepper2.setAcceleration(CIRCLE_Puls/4);
/*==============1、转动=========================*/
//设置电机的目标位置
positions[0] = CIRCLE_Puls*3;
positions[1] = CIRCLE_Puls*3;
//添加到多轴中
steppers.addStepper(stepper1);
steppers.addStepper(stepper2);
//电机运行执行
steppers.moveTo(positions);
steppers.runSpeedToPosition();
//串口反馈1#电机当前的位置
Serial.print("1# Motor Current Position is: ");
Serial.println(stepper1.currentPosition());
delay(2000);
/*==============2、反转=========================*/
//设置电机的目标位置
//positions[0] = CIRCLE_Puls*0;
//positions[1] = CIRCLE_Puls*0;
positions[0] = 1;
positions[1] = 1;
//添加到多轴中
steppers.addStepper(stepper1);
steppers.addStepper(stepper2);
//电机运行执行
steppers.moveTo(positions);
steppers.runSpeedToPosition();
//串口反馈1#电机当前的位置
Serial.print("1# Motor Current Position is: ");
Serial.println(stepper1.currentPosition());
delay(2000);
}
void loop()
{
// put your main code here, to run repeatedly:
}
文章来源:https://blog.csdn.net/panjinliang066333/article/details/135224781
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- python智能家居系统
- Python数据分析案例34——IMDB电影评论情感分析(Transformer)
- Maven环境搭建及配置
- 六:Day06_Spring Security02
- Tailwind CSS Vs Bootstrap 区别,其实大差不差
- Feature Prediction Diffusion Model for Video Anomaly Detection 论文阅读
- 【Pandora Next Notebook】
- 梦想家内容管理系统(Dreamer CMS)跨站请求伪造漏洞
- TTL篇-TTL的使用
- 【Unity美术】Unity工程师对3D模型需要达到的了解【二】