6轴机器人运动正解-逆解控制【1】——三种控制位姿的方式
发布时间:2024年01月24日
概览:
- 通过运动学正解控制机器人运动
- 通过运动学逆解控制机器人运动
- 一个简单的物体搬运(沿轨迹运动)
后续会陆续更新(本例仅供学习交流用)
一、6轴机器人
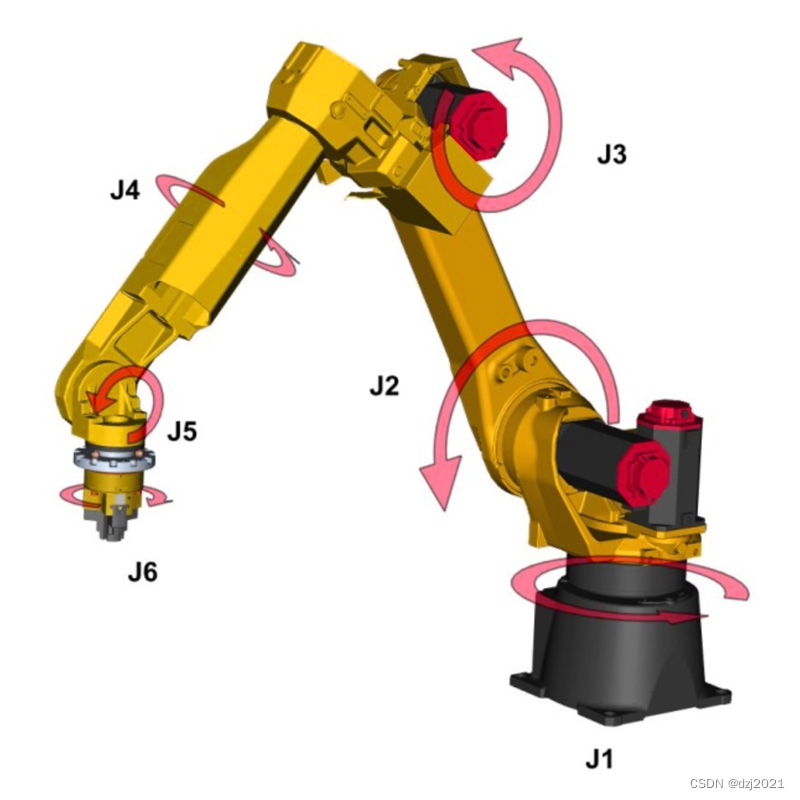
二、运动正解控制
通过修改各个轴的角度,实现末端执行器(TCP)的位姿变换
三、运动逆解控制
指定末端执行器(本例为第六轴的法兰)的位置和姿态,逆向计算各个关节的角度,让他们适应当前的末端位姿信息。

拖拽定位
拖动黄色的滑块,快速把末端位姿定位到指定的position和rotation
四、执行器沿轨迹运行
搬运物体:让末端执行器沿着轨迹搬运
文章来源:https://blog.csdn.net/dzj2021/article/details/135826832
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 切割wav文件至小段wav保存
- FlagData 2.0:全面、高效的大模型训练数据治理工具集
- 深度学习中的KL散度
- 编程八股文——C/C++中静态static关键字的意义和用法
- 贪心算法实现
- nps 实现内网穿透, 免费
- Go语言接口污染:你不得不知道的开发陷阱
- Maven Scope 取值含义
- 回溯法解决染色问题(递归版和迭代版)
- 【MySQL】使用 CAST 函数处理 unsigned 相减错误(BIGINT UNSIGNED value is out of range)