03MARL-联合策略与期望回报
前言
多智能体强化学习问题中的博弈论知识——联合策略与期望回报
一、MARL问题组成

二、联合策略与期望回报
定义一种普遍的期望回报,能够用于所有的多智能体与环境的交互模型当中,因此在POSG的环境下定义,定义了两个等式计算期望回报,如下:
1.History-based expected return
在联合策略
π
\pi
π给定下,智能体i的期望回报为:
U
i
(
π
)
=
E
h
^
t
~
(
P
r
0
,
T
,
O
,
π
)
[
u
i
(
h
^
t
)
]
=
∑
h
^
t
∈
H
^
Pr
?
(
h
^
t
∣
π
)
u
i
(
h
^
t
)
\begin{aligned} U_i(\pi)& =\mathbb{E}_{\hat{h}^t\sim(\mathrm{Pr}^0,\mathcal{T},\mathcal{O},\pi)}\bigg[u_i(\hat{h}^t)\bigg] \\ &\begin{aligned}=\sum_{\hat{h}^t\in\hat{H}}\Pr(\hat{h}^t\mid\pi)u_i(\hat{h}^t)\end{aligned} \end{aligned}
Ui?(π)?=Eh^t~(Pr0,T,O,π)?[ui?(h^t)]=h^t∈H^∑?Pr(h^t∣π)ui?(h^t)??
其中,H包含所有时刻的历史观测序列,
Pr
?
(
h
^
t
∣
π
)
\Pr(\hat{h}^t\mid\pi)
Pr(h^t∣π)代表给定策略下的所有历史观测的概率,
Pr
?
(
h
^
t
∣
π
)
=
Pr
?
0
(
s
0
)
O
(
o
0
∣
?
,
s
0
)
∏
τ
=
0
t
?
1
π
(
a
τ
∣
h
τ
)
T
(
s
τ
+
1
∣
s
τ
,
a
τ
)
O
(
o
τ
+
1
∣
a
τ
,
s
τ
+
1
)
\begin{aligned}\Pr(\hat{h}^t\mid\pi)=&\Pr^0(s^0)\mathcal{O}(o^0\mid\emptyset,s^0)\prod_{\tau=0}^{t-1}\pi(a^\tau\mid h^\tau)\mathcal{T}(s^{\tau+1}\mid s^\tau,a^\tau)\mathcal{O}(o^{\tau+1}\mid a^\tau,s^{\tau+1})\end{aligned}
Pr(h^t∣π)=?Pr0(s0)O(o0∣?,s0)τ=0∏t?1?π(aτ∣hτ)T(sτ+1∣sτ,aτ)O(oτ+1∣aτ,sτ+1)?
u
i
(
h
^
t
)
u_i(\hat{h}^t)
ui?(h^t)是智能体i在观测序列的折扣回报,
u
i
(
h
^
t
)
=
∑
τ
=
0
t
?
1
γ
τ
R
i
(
s
τ
,
a
τ
,
s
τ
+
1
)
u_i(\hat{h}^t)=\sum_{\tau=0}^{t-1}\gamma^\tau\mathcal{R}_i(s^\tau,a^\tau,s^{\tau+1})
ui?(h^t)=∑τ=0t?1?γτRi?(sτ,aτ,sτ+1),使用
π
(
a
τ
∣
h
τ
)
\pi(a^\tau\mid h^\tau)
π(aτ∣hτ)表示观测序列条件下,联合动作的概率分布,前提的假设是智能体之间的动作是独立的,因此
π
(
a
τ
∣
h
τ
)
=
∏
j
∈
I
π
j
(
a
j
τ
∣
h
j
τ
)
\pi(a^\tau\mid h^\tau)=\prod_{j\in I}\pi_j(a_j^\tau\mid h_j^\tau)
π(aτ∣hτ)=∏j∈I?πj?(ajτ?∣hjτ?)。
2.Recursive expected return
类似于贝尔曼方程的形式定义期望回报,首先定义了联合策略下的状态价值函数与动作价值函数
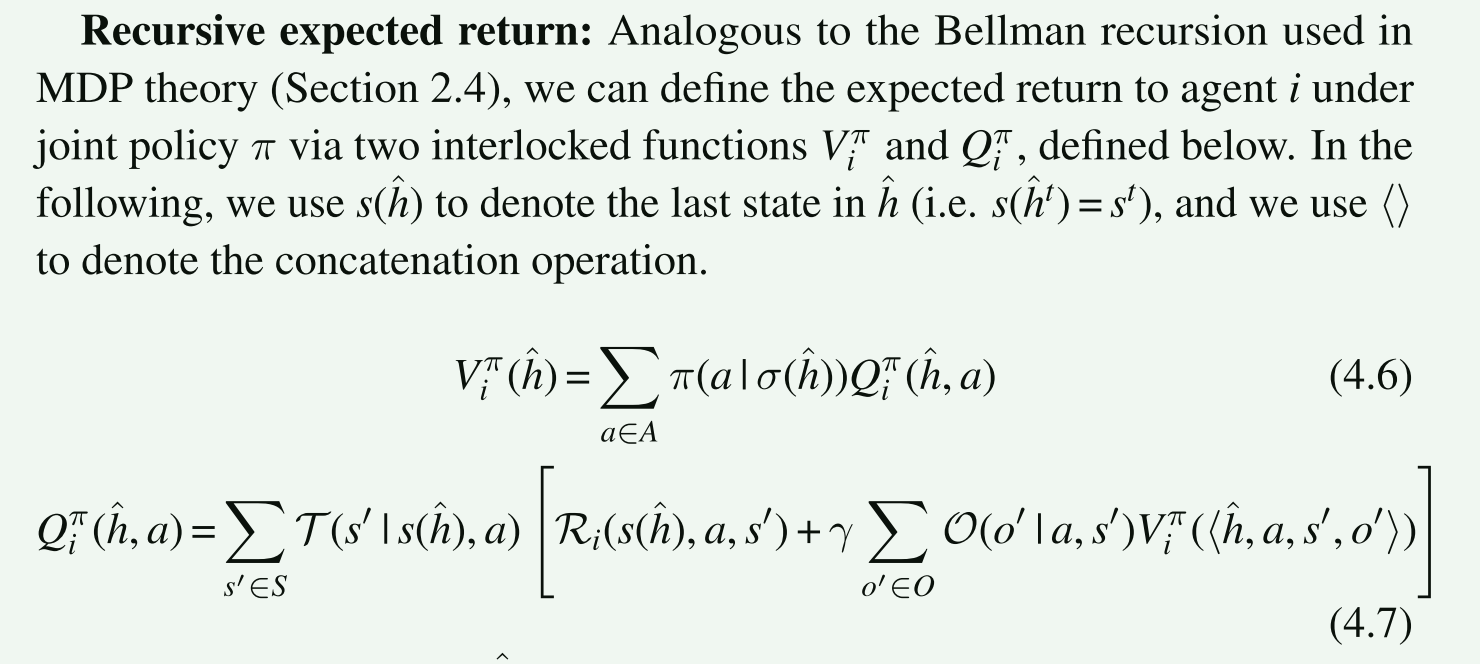
在这里
V
i
π
(
h
^
)
V_i^\pi(\hat{h})
Viπ?(h^)代表智能体i在给定策略下,所有历史序列取得的值,可以当期望回报,而
Q
i
π
(
h
^
,
a
)
Q_i^\pi(\hat{h},a)
Qiπ?(h^,a)代表智能体i根据观测序列,在给定策略下,采取的联合动作带来的即使收益,进一步可以将回报期望写为:
U
i
(
π
)
=
E
s
0
~
P
r
0
,
o
0
~
O
(
?
∣
?
,
s
0
)
[
V
i
π
(
?
s
0
,
o
0
?
)
]
U_i(\pi){=}\mathbb{E}_{s^0\sim\mathrm{Pr}^0,o^0\sim\mathcal{O}(\cdot|\emptyset,s^0)}[V_i^\pi(\langle s^0,o^0\rangle)]
Ui?(π)=Es0~Pr0,o0~O(?∣?,s0)?[Viπ?(?s0,o0?)]
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Java中的锁(二)
- 什么是Vue.js的响应式系统(reactivity system)?如何实现数据的双向绑定?
- 星耀新春,集星探宝,卡奥斯开源社区双节活动上线啦!
- Java小案例-Sentinel的实现原理
- 大创项目推荐 图像识别-人脸识别与疲劳检测 - python opencv
- 文件处理的重定义,dup2函数
- flex 属性
- “SRP模型+”多技术融合在生态环境脆弱性评价模型构建、时空格局演变分析与RSEI 指数的生态质量评价及拓展应用
- 【css】实现渐变文字效果(linear-gradient&radial-gradient)
- Linux 网络设备 - TUN/TAP