机器人中的数值优化之牛顿共轭梯度法
发布时间:2023年12月28日
欢迎大家关注我的B站:
偷吃薯片的Zheng同学的个人空间-偷吃薯片的Zheng同学个人主页-哔哩哔哩视频 (bilibili.com)
本文ppt来自深蓝学院《机器人中的数值优化》
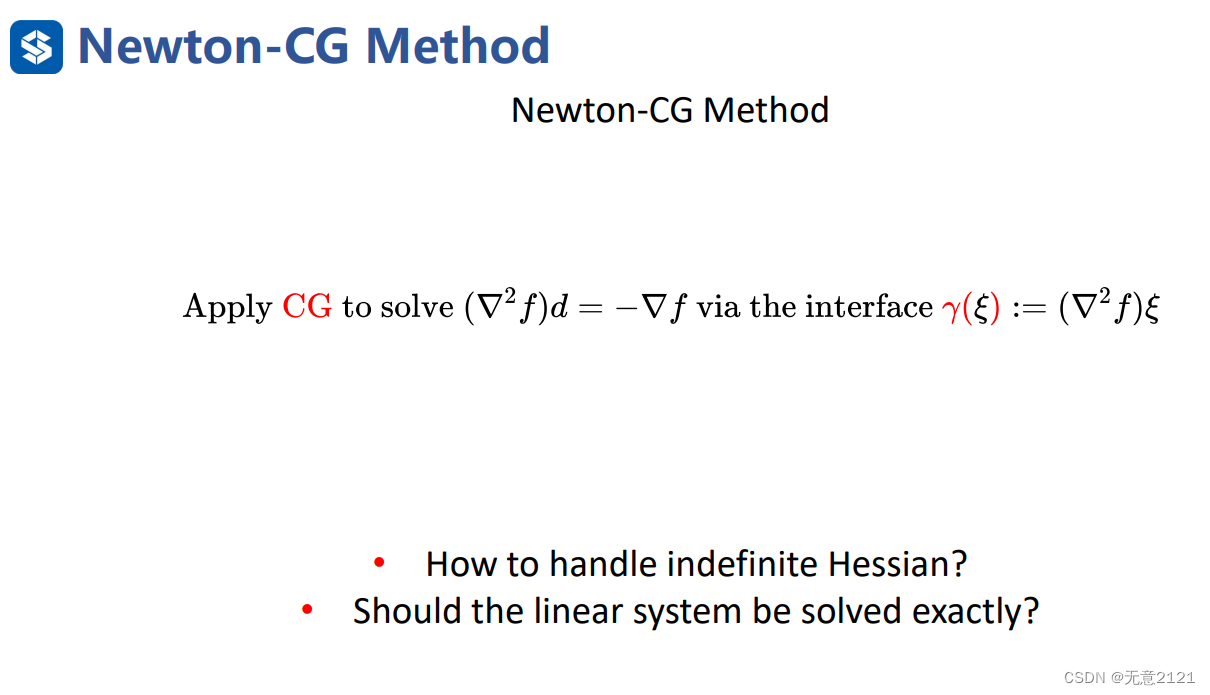
如何解决Hessian矩阵非正定的情况
求解线性系统需要很精确么
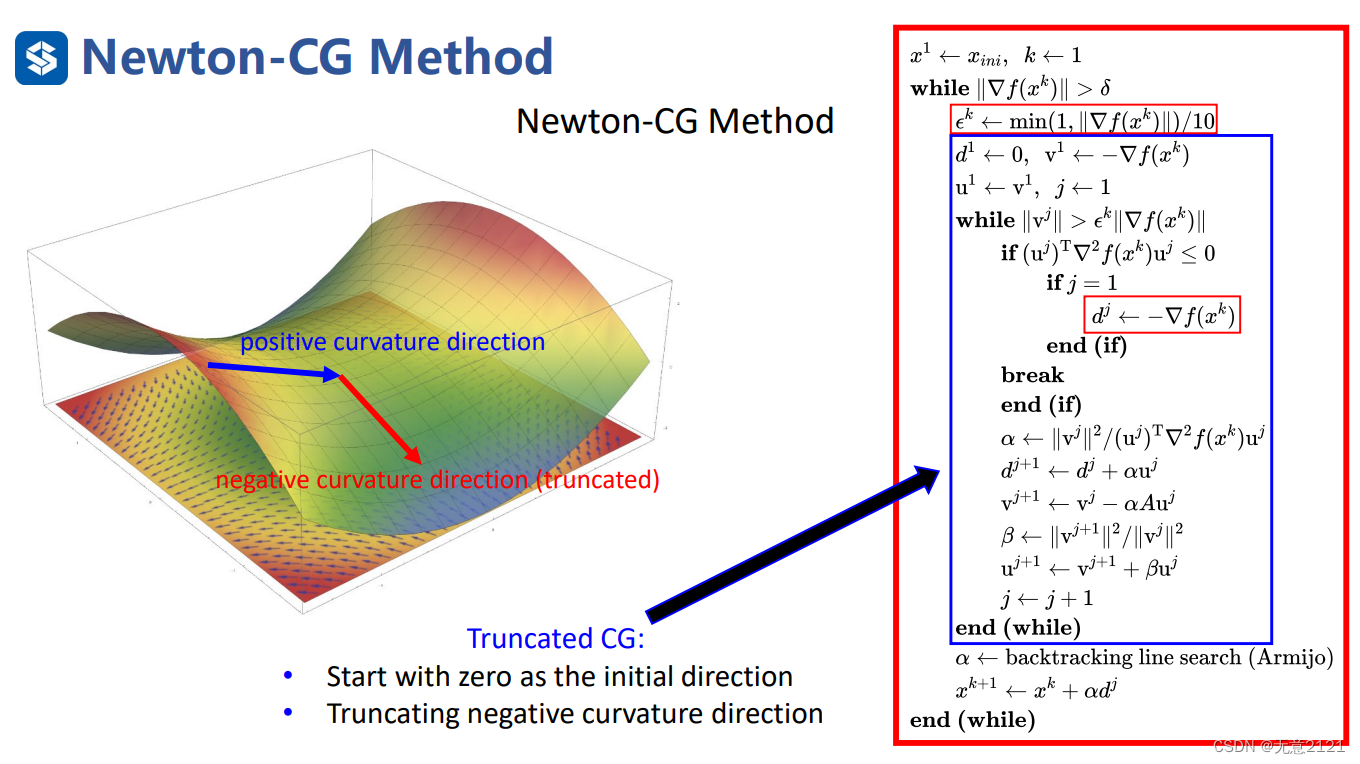
引入截断的机制,如果Hessian矩阵不是正定的,而且是初始位置,说明刚开始用共轭梯度的效果很差,所以直接把搜索方向改为负梯度方向,到达一个相对较好的初始位置
否则直接break,因为如果此时用共轭法可能会让函数上升
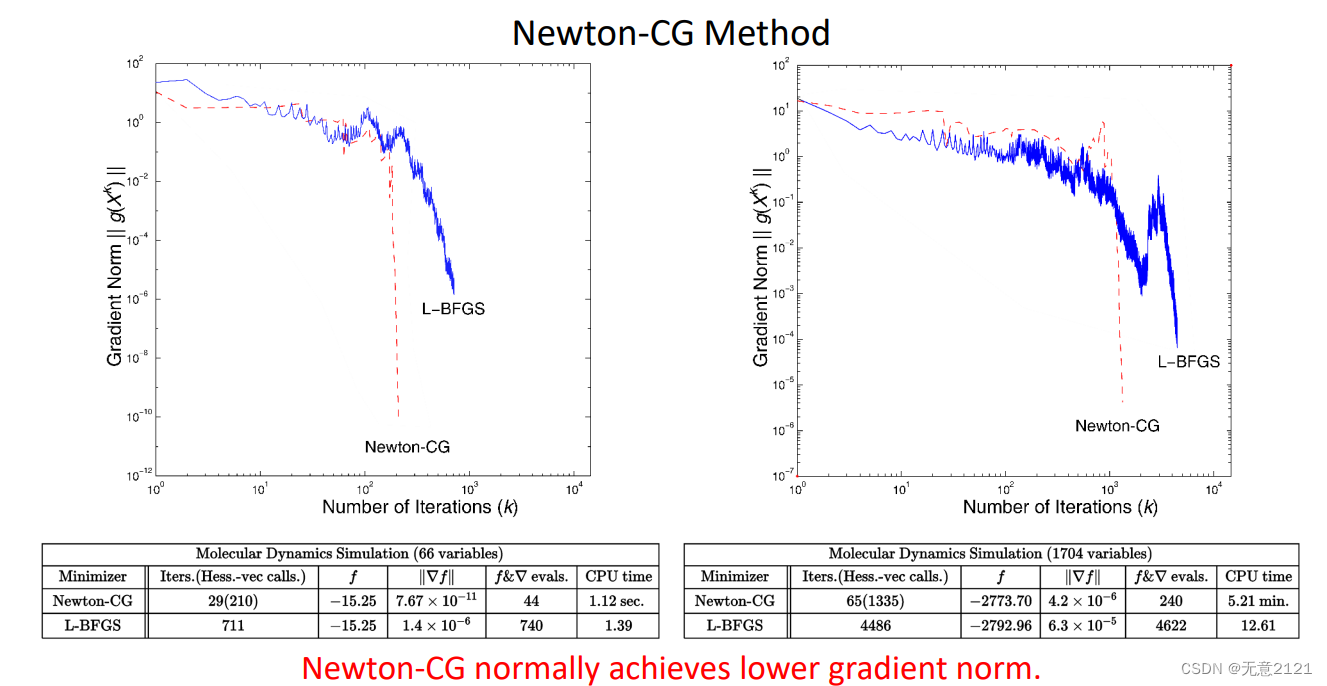
Newton-CG除了更快还更精确
然后注意这里的纵坐标是gradient norm,这是不能做到单调下降的
文章来源:https://blog.csdn.net/weixin_65089713/article/details/135278364
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- C++算法学习心得六.回溯算法(1)
- Javascript入门||基础篇
- docker搭建部署mysql并挂载指定目录
- [楚慧杯 2023] web
- python调用企业支付宝转账到个人账户的代码-2023年1月18日亲测能用
- 使用dd命令打包jetson nano 树莓派等linux开发板SD卡中的镜像
- 数据结构---算法的时间复杂度
- Android 实现跑马灯效果
- Jest和Mocha对比:两者之间有哪些区别?
- 科技云报道:开源才是大模型的未来?