C# OpenCvSharp DNN 部署yolov3目标检测
目录
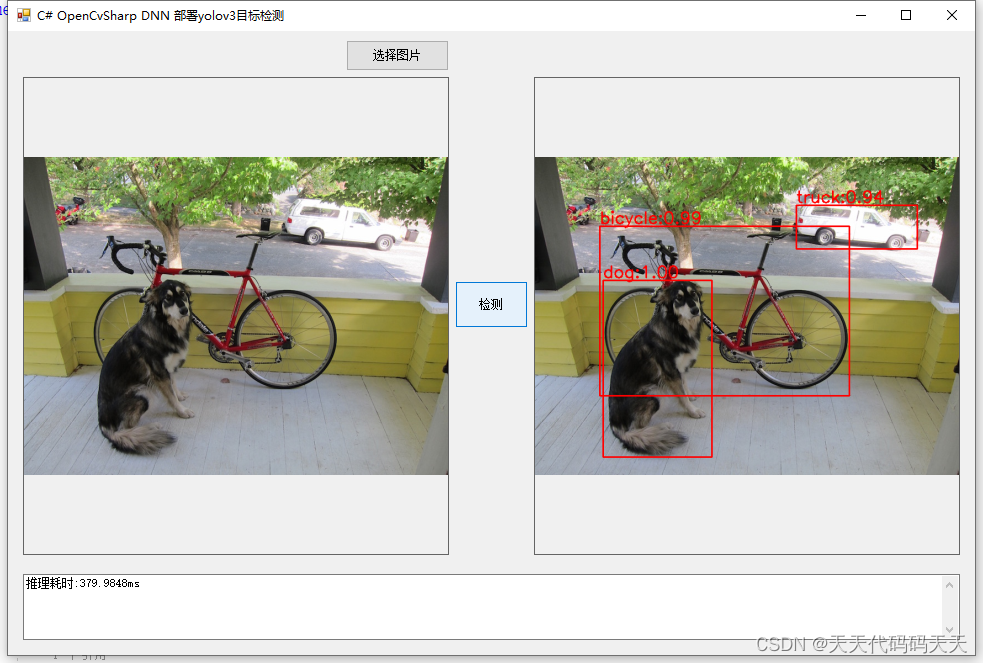
C# OpenCvSharp DNN 部署yolov3目标检测
效果
yolov3.cfg
[net]
# Testing
#batch=1
#subdivisions=1
# Training
batch=16
subdivisions=1
width=416
height=416
channels=3
momentum=0.9
decay=0.0005
angle=0
saturation = 1.5
exposure = 1.5
hue=.1
learning_rate=0.001
burn_in=1000
max_batches = 500200
policy=steps
steps=400000,450000
scales=.1,.1
[convolutional]
batch_normalize=1
filters=32
size=3
stride=1
pad=1
activation=leaky
# Downsample
[convolutional]
batch_normalize=1
filters=64
size=3
stride=2
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=32
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=64
size=3
stride=1
pad=1
activation=leaky
[shortcut]
from=-3
activation=linear
# Downsample
[convolutional]
batch_normalize=1
filters=128
size=3
stride=2
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=64
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=128
size=3
stride=1
pad=1
activation=leaky
[shortcut]
from=-3
activation=linear
[convolutional]
batch_normalize=1
filters=64
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=128
size=3
stride=1
pad=1
activation=leaky
[shortcut]
from=-3
activation=linear
# Downsample
[convolutional]
batch_normalize=1
filters=256
size=3
stride=2
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=128
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=256
size=3
stride=1
pad=1
activation=leaky
[shortcut]
from=-3
activation=linear
[convolutional]
batch_normalize=1
filters=128
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=256
size=3
stride=1
pad=1
activation=leaky
[shortcut]
from=-3
activation=linear
[convolutional]
batch_normalize=1
filters=128
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=256
size=3
stride=1
pad=1
activation=leaky
[shortcut]
from=-3
activation=linear
[convolutional]
batch_normalize=1
filters=128
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=256
size=3
stride=1
pad=1
activation=leaky
[shortcut]
from=-3
activation=linear
[convolutional]
batch_normalize=1
filters=128
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=256
size=3
stride=1
pad=1
activation=leaky
[shortcut]
from=-3
activation=linear
[convolutional]
batch_normalize=1
filters=128
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=256
size=3
stride=1
pad=1
activation=leaky
[shortcut]
from=-3
activation=linear
[convolutional]
batch_normalize=1
filters=128
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=256
size=3
stride=1
pad=1
activation=leaky
[shortcut]
from=-3
activation=linear
[convolutional]
batch_normalize=1
filters=128
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=256
size=3
stride=1
pad=1
activation=leaky
[shortcut]
from=-3
activation=linear
# Downsample
[convolutional]
batch_normalize=1
filters=512
size=3
stride=2
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=256
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=512
size=3
stride=1
pad=1
activation=leaky
[shortcut]
from=-3
activation=linear
[convolutional]
batch_normalize=1
filters=256
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=512
size=3
stride=1
pad=1
activation=leaky
[shortcut]
from=-3
activation=linear
[convolutional]
batch_normalize=1
filters=256
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=512
size=3
stride=1
pad=1
activation=leaky
[shortcut]
from=-3
activation=linear
[convolutional]
batch_normalize=1
filters=256
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=512
size=3
stride=1
pad=1
activation=leaky
[shortcut]
from=-3
activation=linear
[convolutional]
batch_normalize=1
filters=256
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=512
size=3
stride=1
pad=1
activation=leaky
[shortcut]
from=-3
activation=linear
[convolutional]
batch_normalize=1
filters=256
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=512
size=3
stride=1
pad=1
activation=leaky
[shortcut]
from=-3
activation=linear
[convolutional]
batch_normalize=1
filters=256
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=512
size=3
stride=1
pad=1
activation=leaky
[shortcut]
from=-3
activation=linear
[convolutional]
batch_normalize=1
filters=256
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=512
size=3
stride=1
pad=1
activation=leaky
[shortcut]
from=-3
activation=linear
# Downsample
[convolutional]
batch_normalize=1
filters=1024
size=3
stride=2
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=512
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=1024
size=3
stride=1
pad=1
activation=leaky
[shortcut]
from=-3
activation=linear
[convolutional]
batch_normalize=1
filters=512
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=1024
size=3
stride=1
pad=1
activation=leaky
[shortcut]
from=-3
activation=linear
[convolutional]
batch_normalize=1
filters=512
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=1024
size=3
stride=1
pad=1
activation=leaky
[shortcut]
from=-3
activation=linear
[convolutional]
batch_normalize=1
filters=512
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=1024
size=3
stride=1
pad=1
activation=leaky
[shortcut]
from=-3
activation=linear
######################
[convolutional]
batch_normalize=1
filters=512
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
size=3
stride=1
pad=1
filters=1024
activation=leaky
[convolutional]
batch_normalize=1
filters=512
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
size=3
stride=1
pad=1
filters=1024
activation=leaky
[convolutional]
batch_normalize=1
filters=512
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
size=3
stride=1
pad=1
filters=1024
activation=leaky
[convolutional]
size=1
stride=1
pad=1
filters=255
activation=linear
[yolo]
mask = 6,7,8
anchors = 10,13, 16,30, 33,23, 30,61, 62,45, 59,119, 116,90, 156,198, 373,326
classes=80
num=9
jitter=.3
ignore_thresh = .7
truth_thresh = 1
random=1
[route]
layers = -4
[convolutional]
batch_normalize=1
filters=256
size=1
stride=1
pad=1
activation=leaky
[upsample]
stride=2
[route]
layers = -1, 61
[convolutional]
batch_normalize=1
filters=256
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
size=3
stride=1
pad=1
filters=512
activation=leaky
[convolutional]
batch_normalize=1
filters=256
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
size=3
stride=1
pad=1
filters=512
activation=leaky
[convolutional]
batch_normalize=1
filters=256
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
size=3
stride=1
pad=1
filters=512
activation=leaky
[convolutional]
size=1
stride=1
pad=1
filters=255
activation=linear
[yolo]
mask = 3,4,5
anchors = 10,13, 16,30, 33,23, 30,61, 62,45, 59,119, 116,90, 156,198, 373,326
classes=80
num=9
jitter=.3
ignore_thresh = .7
truth_thresh = 1
random=1
[route]
layers = -4
[convolutional]
batch_normalize=1
filters=128
size=1
stride=1
pad=1
activation=leaky
[upsample]
stride=2
[route]
layers = -1, 36
[convolutional]
batch_normalize=1
filters=128
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
size=3
stride=1
pad=1
filters=256
activation=leaky
[convolutional]
batch_normalize=1
filters=128
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
size=3
stride=1
pad=1
filters=256
activation=leaky
[convolutional]
batch_normalize=1
filters=128
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
size=3
stride=1
pad=1
filters=256
activation=leaky
[convolutional]
size=1
stride=1
pad=1
filters=255
activation=linear
[yolo]
mask = 0,1,2
anchors = 10,13, 16,30, 33,23, 30,61, 62,45, 59,119, 116,90, 156,198, 373,326
classes=80
num=9
jitter=.3
ignore_thresh = .7
truth_thresh = 1
random=1
项目
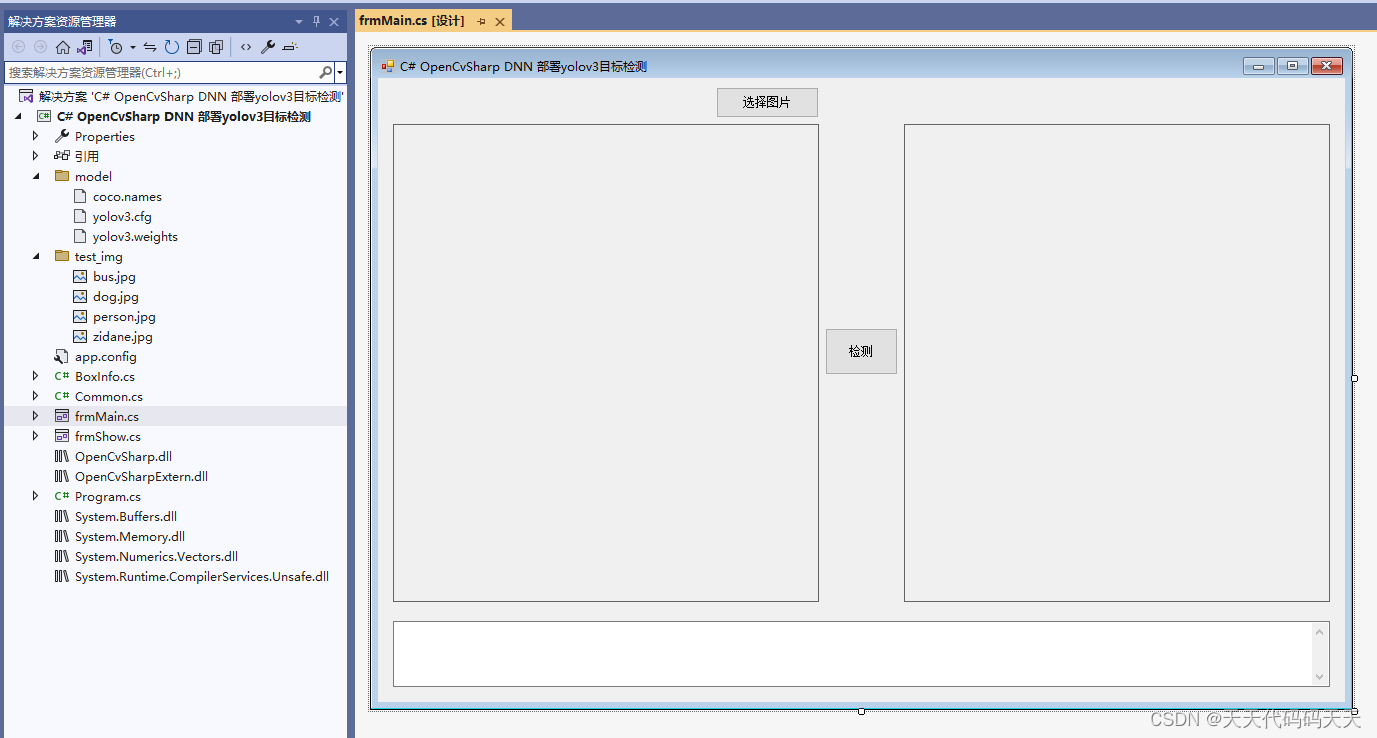
代码
using OpenCvSharp;
using OpenCvSharp.Dnn;
using System;
using System.Collections.Generic;
using System.Drawing;
using System.IO;
using System.Linq;
using System.Windows.Forms;
namespace OpenCvSharp_DNN_Demo
{
? ? public partial class frmMain : Form
? ? {
? ? ? ? public frmMain()
? ? ? ? {
? ? ? ? ? ? InitializeComponent();
? ? ? ? }
? ? ? ? string fileFilter = "*.*|*.bmp;*.jpg;*.jpeg;*.tiff;*.tiff;*.png";
? ? ? ? string image_path = "";
? ? ? ? DateTime dt1 = DateTime.Now;
? ? ? ? DateTime dt2 = DateTime.Now;
? ? ? ? float confThreshold;
? ? ? ? float nmsThreshold;
? ? ? ? int inpHeight;
? ? ? ? int inpWidth;
? ? ? ? List<string> class_names;
? ? ? ? int num_class;
? ? ? ? Net opencv_net;
? ? ? ? Mat BN_image;
? ? ? ? Mat image;
? ? ? ? Mat result_image;
? ? ? ? private void button1_Click(object sender, EventArgs e)
? ? ? ? {
? ? ? ? ? ? OpenFileDialog ofd = new OpenFileDialog();
? ? ? ? ? ? ofd.Filter = fileFilter;
? ? ? ? ? ? if (ofd.ShowDialog() != DialogResult.OK) return;
? ? ? ? ? ? pictureBox1.Image = null;
? ? ? ? ? ? pictureBox2.Image = null;
? ? ? ? ? ? textBox1.Text = "";
? ? ? ? ? ? image_path = ofd.FileName;
? ? ? ? ? ? pictureBox1.Image = new Bitmap(image_path);
? ? ? ? ? ? image = new Mat(image_path);
? ? ? ? }
? ? ? ? private void Form1_Load(object sender, EventArgs e)
? ? ? ? {
? ? ? ? ? ? confThreshold = 0.5f;
? ? ? ? ? ? nmsThreshold = 0.4f;
? ? ? ? ? ? inpHeight = 416;
? ? ? ? ? ? inpWidth = 416;
? ? ? ? ? ? opencv_net = CvDnn.ReadNetFromDarknet("model/yolov3.cfg", "model/yolov3.weights");
? ? ? ? ? ? class_names = new List<string>();
? ? ? ? ? ? StreamReader sr = new StreamReader("model/coco.names");
? ? ? ? ? ? string line;
? ? ? ? ? ? while ((line = sr.ReadLine()) != null)
? ? ? ? ? ? {
? ? ? ? ? ? ? ? class_names.Add(line);
? ? ? ? ? ? }
? ? ? ? ? ? num_class = class_names.Count();
? ? ? ? ? ? image_path = "test_img/dog.jpg";
? ? ? ? ? ? pictureBox1.Image = new Bitmap(image_path);
? ? ? ? }
? ? ? ? private unsafe void button2_Click(object sender, EventArgs e)
? ? ? ? {
? ? ? ? ? ? if (image_path == "")
? ? ? ? ? ? {
? ? ? ? ? ? ? ? return;
? ? ? ? ? ? }
? ? ? ? ? ? textBox1.Text = "检测中,请稍等……";
? ? ? ? ? ? pictureBox2.Image = null;
? ? ? ? ? ? Application.DoEvents();
? ? ? ? ? ? image = new Mat(image_path);
? ? ? ? ? ? BN_image = CvDnn.BlobFromImage(image, 1 / 255.0, new OpenCvSharp.Size(inpWidth, inpHeight), new Scalar(0, 0, 0), true, false);
? ? ? ? ? ? //配置图片输入数据
? ? ? ? ? ? opencv_net.SetInput(BN_image);
? ? ? ? ? ? //模型推理,读取推理结果
? ? ? ? ? ? var outNames = opencv_net.GetUnconnectedOutLayersNames();
? ? ? ? ? ? var outs = outNames.Select(_ => new Mat()).ToArray();
? ? ? ? ? ? dt1 = DateTime.Now;
? ? ? ? ? ? opencv_net.Forward(outs, outNames);
? ? ? ? ? ? dt2 = DateTime.Now;
? ? ? ? ? ? List<int> classIds = new List<int>();
? ? ? ? ? ? List<float> confidences = new List<float>();
? ? ? ? ? ? List<Rect> boxes = new List<Rect>();
? ? ? ? ? ? for (int i = 0; i < outs.Length; ++i)
? ? ? ? ? ? {
? ? ? ? ? ? ? ? float* data = (float*)outs[i].Data;
? ? ? ? ? ? ? ? for (int j = 0; j < outs[i].Rows; ++j, data += outs[i].Cols)
? ? ? ? ? ? ? ? {
? ? ? ? ? ? ? ? ? ? Mat scores = outs[i].Row(j).ColRange(5, outs[i].Cols);
? ? ? ? ? ? ? ? ? ? double minVal, max_class_socre;
? ? ? ? ? ? ? ? ? ? OpenCvSharp.Point minLoc, classIdPoint;
? ? ? ? ? ? ? ? ? ? // Get the value and location of the maximum score
? ? ? ? ? ? ? ? ? ? Cv2.MinMaxLoc(scores, out minVal, out max_class_socre, out minLoc, out classIdPoint);
? ? ? ? ? ? ? ? ? ? if (max_class_socre > confThreshold)
? ? ? ? ? ? ? ? ? ? {
? ? ? ? ? ? ? ? ? ? ? ? int centerX = (int)(data[0] * image.Cols);
? ? ? ? ? ? ? ? ? ? ? ? int centerY = (int)(data[1] * image.Rows);
? ? ? ? ? ? ? ? ? ? ? ? int width = (int)(data[2] * image.Cols);
? ? ? ? ? ? ? ? ? ? ? ? int height = (int)(data[3] * image.Rows);
? ? ? ? ? ? ? ? ? ? ? ? int left = centerX - width / 2;
? ? ? ? ? ? ? ? ? ? ? ? int top = centerY - height / 2;
? ? ? ? ? ? ? ? ? ? ? ? classIds.Add(classIdPoint.X);
? ? ? ? ? ? ? ? ? ? ? ? confidences.Add((float)max_class_socre);
? ? ? ? ? ? ? ? ? ? ? ? boxes.Add(new Rect(left, top, width, height));
? ? ? ? ? ? ? ? ? ? }
? ? ? ? ? ? ? ? }
? ? ? ? ? ? }
? ? ? ? ? ? int[] indices;
? ? ? ? ? ? CvDnn.NMSBoxes(boxes, confidences, confThreshold, nmsThreshold, out indices);
? ? ? ? ? ? result_image = image.Clone();
? ? ? ? ? ? for (int i = 0; i < indices.Length; ++i)
? ? ? ? ? ? {
? ? ? ? ? ? ? ? int idx = indices[i];
? ? ? ? ? ? ? ? Rect box = boxes[idx];
? ? ? ? ? ? ? ? Cv2.Rectangle(result_image, new OpenCvSharp.Point(box.X, box.Y), new OpenCvSharp.Point(box.X + box.Width, box.Y + box.Height), new Scalar(0, 0, 255), 2);
? ? ? ? ? ? ? ? string label = class_names[classIds[idx]] + ":" + confidences[idx].ToString("0.00");
? ? ? ? ? ? ? ? Cv2.PutText(result_image, label, new OpenCvSharp.Point(box.X, box.Y - 5), HersheyFonts.HersheySimplex, 1, new Scalar(0, 0, 255), 2);
? ? ? ? ? ? }
? ? ? ? ? ? pictureBox2.Image = new Bitmap(result_image.ToMemoryStream());
? ? ? ? ? ? textBox1.Text = "推理耗时:" + (dt2 - dt1).TotalMilliseconds + "ms";
? ? ? ? }
? ? ? ? private void pictureBox2_DoubleClick(object sender, EventArgs e)
? ? ? ? {
? ? ? ? ? ? Common.ShowNormalImg(pictureBox2.Image);
? ? ? ? }
? ? ? ? private void pictureBox1_DoubleClick(object sender, EventArgs e)
? ? ? ? {
? ? ? ? ? ? Common.ShowNormalImg(pictureBox1.Image);
? ? ? ? }
? ? }
}
using OpenCvSharp;
using OpenCvSharp.Dnn;
using System;
using System.Collections.Generic;
using System.Drawing;
using System.IO;
using System.Linq;
using System.Windows.Forms;
namespace OpenCvSharp_DNN_Demo
{
public partial class frmMain : Form
{
public frmMain()
{
InitializeComponent();
}
string fileFilter = "*.*|*.bmp;*.jpg;*.jpeg;*.tiff;*.tiff;*.png";
string image_path = "";
DateTime dt1 = DateTime.Now;
DateTime dt2 = DateTime.Now;
float confThreshold;
float nmsThreshold;
int inpHeight;
int inpWidth;
List<string> class_names;
int num_class;
Net opencv_net;
Mat BN_image;
Mat image;
Mat result_image;
private void button1_Click(object sender, EventArgs e)
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = fileFilter;
if (ofd.ShowDialog() != DialogResult.OK) return;
pictureBox1.Image = null;
pictureBox2.Image = null;
textBox1.Text = "";
image_path = ofd.FileName;
pictureBox1.Image = new Bitmap(image_path);
image = new Mat(image_path);
}
private void Form1_Load(object sender, EventArgs e)
{
confThreshold = 0.5f;
nmsThreshold = 0.4f;
inpHeight = 416;
inpWidth = 416;
opencv_net = CvDnn.ReadNetFromDarknet("model/yolov3.cfg", "model/yolov3.weights");
class_names = new List<string>();
StreamReader sr = new StreamReader("model/coco.names");
string line;
while ((line = sr.ReadLine()) != null)
{
class_names.Add(line);
}
num_class = class_names.Count();
image_path = "test_img/dog.jpg";
pictureBox1.Image = new Bitmap(image_path);
}
private unsafe void button2_Click(object sender, EventArgs e)
{
if (image_path == "")
{
return;
}
textBox1.Text = "检测中,请稍等……";
pictureBox2.Image = null;
Application.DoEvents();
image = new Mat(image_path);
BN_image = CvDnn.BlobFromImage(image, 1 / 255.0, new OpenCvSharp.Size(inpWidth, inpHeight), new Scalar(0, 0, 0), true, false);
//配置图片输入数据
opencv_net.SetInput(BN_image);
//模型推理,读取推理结果
var outNames = opencv_net.GetUnconnectedOutLayersNames();
var outs = outNames.Select(_ => new Mat()).ToArray();
dt1 = DateTime.Now;
opencv_net.Forward(outs, outNames);
dt2 = DateTime.Now;
List<int> classIds = new List<int>();
List<float> confidences = new List<float>();
List<Rect> boxes = new List<Rect>();
for (int i = 0; i < outs.Length; ++i)
{
float* data = (float*)outs[i].Data;
for (int j = 0; j < outs[i].Rows; ++j, data += outs[i].Cols)
{
Mat scores = outs[i].Row(j).ColRange(5, outs[i].Cols);
double minVal, max_class_socre;
OpenCvSharp.Point minLoc, classIdPoint;
// Get the value and location of the maximum score
Cv2.MinMaxLoc(scores, out minVal, out max_class_socre, out minLoc, out classIdPoint);
if (max_class_socre > confThreshold)
{
int centerX = (int)(data[0] * image.Cols);
int centerY = (int)(data[1] * image.Rows);
int width = (int)(data[2] * image.Cols);
int height = (int)(data[3] * image.Rows);
int left = centerX - width / 2;
int top = centerY - height / 2;
classIds.Add(classIdPoint.X);
confidences.Add((float)max_class_socre);
boxes.Add(new Rect(left, top, width, height));
}
}
}
int[] indices;
CvDnn.NMSBoxes(boxes, confidences, confThreshold, nmsThreshold, out indices);
result_image = image.Clone();
for (int i = 0; i < indices.Length; ++i)
{
int idx = indices[i];
Rect box = boxes[idx];
Cv2.Rectangle(result_image, new OpenCvSharp.Point(box.X, box.Y), new OpenCvSharp.Point(box.X + box.Width, box.Y + box.Height), new Scalar(0, 0, 255), 2);
string label = class_names[classIds[idx]] + ":" + confidences[idx].ToString("0.00");
Cv2.PutText(result_image, label, new OpenCvSharp.Point(box.X, box.Y - 5), HersheyFonts.HersheySimplex, 1, new Scalar(0, 0, 255), 2);
}
pictureBox2.Image = new Bitmap(result_image.ToMemoryStream());
textBox1.Text = "推理耗时:" + (dt2 - dt1).TotalMilliseconds + "ms";
}
private void pictureBox2_DoubleClick(object sender, EventArgs e)
{
Common.ShowNormalImg(pictureBox2.Image);
}
private void pictureBox1_DoubleClick(object sender, EventArgs e)
{
Common.ShowNormalImg(pictureBox1.Image);
}
}
}
下载
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 面试算法98:路径的数目
- RTSP和RTMP协议有什么区别?RTSP为什么常用于安防监控摄像头行业,而视频直播却只使用RTMP推流?
- 从零开始学Python系列课程第13课:Python中的循环结构(上)
- 福昕软件的使用
- ThinkPHP如何防止SQL注入攻击
- 计算机体系结构----缓存一致性/多处理机
- Android Termux技能大揭秘:安装MySQL并实现公网远程连接
- 商中在线(商务中国)域名外部入库流程
- 汇编语言指令系列
- Transformer架构详解