云计算任务调度仿真03
发布时间:2024年01月11日
前面陆续分享了基于policy gradient和DQN实现的深度强化学习任务调度仿真,上次的DQN没有实现fix-qtarget和experience replay,这次再分享实现了这两个方法的DQN任务调度仿真。
经验重放,定义存储和存放次序,这里也可以自行修改
def store_transition(self, s, a, r, s_):
#经验重放
one_hot_action = np.zeros(self.n_actions)
one_hot_action[a] = 1
self.replay_buffer.append((s, one_hot_action, r, s_))
if len(self.replay_buffer) > self.memory_size:
self.replay_buffer.popleft()
在学习过程定期更新网络
def learn(self):
# 定期替换网络参数
if self.learn_step_counter % self.replace_target_iter == 0:
self.sess.run(self.replace_target_op)
# print('-------------target_params_replaced------------------')
# sample batch memory from all memory: [s, a, r, s_],采样学习,批量学习
minibatch = random.sample(self.replay_buffer, self.batch_size)
state_batch = [data[0] for data in minibatch]
action_batch = [data[1] for data in minibatch]
next_state_batch = [data[3] for data in minibatch]
# calculate target q-value batch
q_next_batch = self.sess.run(self.q_next, feed_dict={self.s_: next_state_batch})
q_real_batch = []
for i in range(self.batch_size):
q_real_batch.append(minibatch[i][2] + self.gamma * np.max(q_next_batch[i]))
# train eval network
self.sess.run(self._train_op, feed_dict={
self.s: state_batch,
self.action_input: action_batch,
self.q_target: q_real_batch
})
# increasing epsilon
if self.epsilon < self.epsilon_max:
self.epsilon = self.epsilon + self.epsilon_increment
else:
self.epsilon = self.epsilon_max
# print('epsilon:', self.epsilon)
self.learn_step_counter += 1
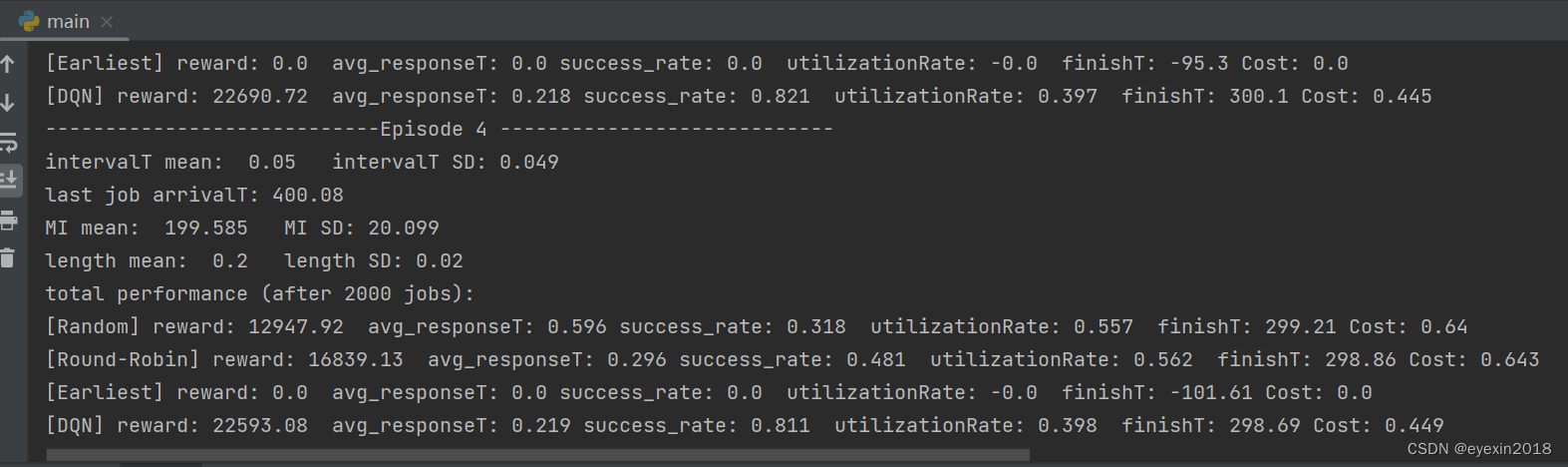
运行效果
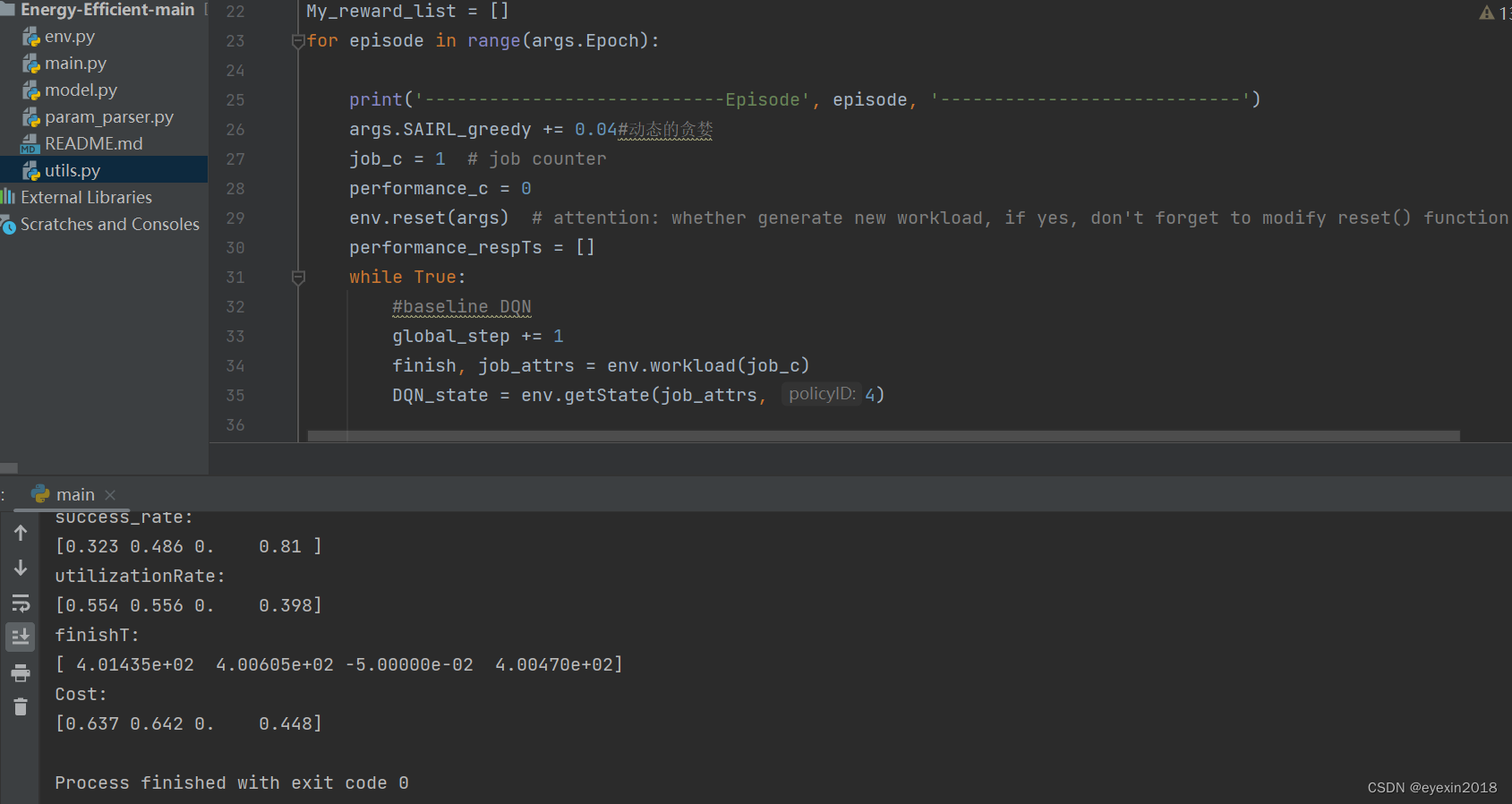
还有一些对比算法
代码是基于TensorFlow1.x实现的,可以在此基础上再修改优化,完整的代码可根据名字去GitHub上下载获取。
文章来源:https://blog.csdn.net/eyexin2018/article/details/135517967
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 网络部署实战具体学习内容总结
- 超分之ESRGAN
- NLP论文阅读记录 - 05 | 2023 抽象总结与提取总结:实验回顾
- office visio2016安装步骤
- brew 安装使用 mysql、redis、mongodb
- 机器人制作开源方案 | 六足灾后探测机器人
- Spring事务管理
- 两周掌握Vue3(四):计算属性、监听属性、事件处理
- Spring中Autowired原理
- Java包装类及引用数据类型(学习推荐版,通俗易懂)