伺服电机:编码器原理与分类
什么是编码器?
编码器是将旋转位置的改变转换为电气信号。
编码器是伺服系统闭环控制不可缺少的部件,编码器应用在轴的闭环控制和大多数的自动化控制中。编码器为闭环控制提供位置或速度的实际测量值。
一、编码器的分类
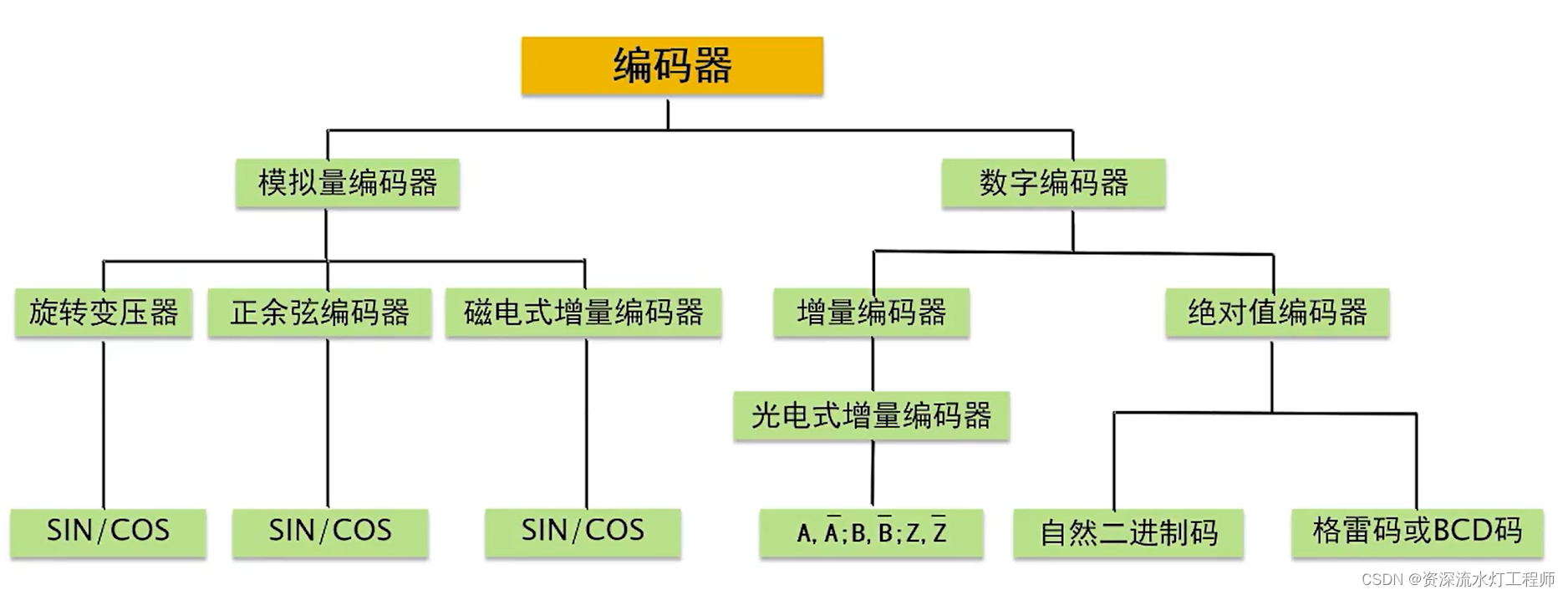
从编码器的原理和产生的信号类型,可以将编码器分为模拟量编码器和数字量编码器;
模拟量编码器又细分为旋转变压器、正余弦编码器、磁电式增量编码器,现在的编码器集成度比较高,哪怕是模拟量编码器,它的内部也集成了AD转换装置,可以进行数字量输出,所以最终给到伺服控制器的还是数字量信号,这样伺服控制器内部就不需要再对模拟量进行处理。
数字编码器又细分为增量编码器和绝对值编码器,常见的增量编码器是光电式增量编码器,有AB两相脉冲信号,同时还有一个Z相信号,Z相信号是旋转一圈就发出一个脉冲。绝对值编码器直接输出位置数据,位置编码有二进制码和格雷码或者BCD码。
增量型编码器,在断电之后需要重新找原点,才能进行位置控制。
绝对型编码器,在断电之后不需要重新找原点,可以继续进行位置控制。
二、光电增量式编码器
?
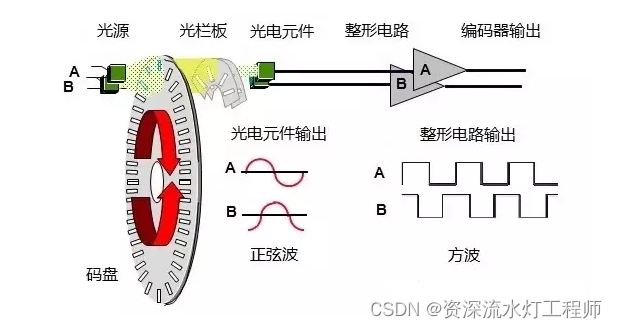
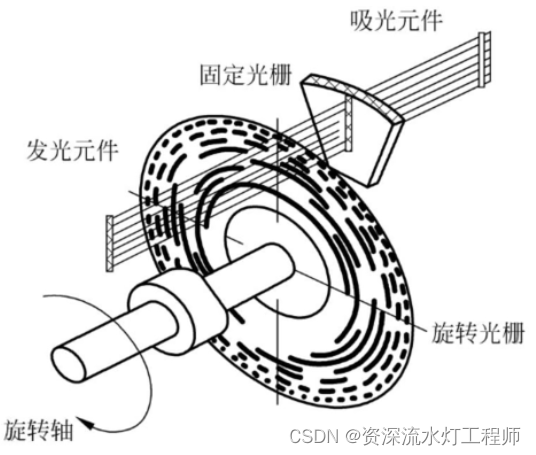
光电增量式编码器原理
光电增量式编码器是一种比较常见的增量编码器,它主要由码盘、发光管、光电接收管、整型电路组成。码盘上镀有挡光材料,同时沿码盘一周均匀刻画出N条通光窗口,也就是码道。码盘旋转一圈,将会产生N次通光和遮光。光电接收管接收到光信号后产生电压信号,电压再经过放大整型电路转换成数字脉冲信号。因为码盘是跟随电机的轴同步转动,所以对买中计数就可以算出增量位置信息和单位时间内的转速。
光电编码器的码盘材料有多种,比如玻璃、金属、塑料。
玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性和精度都可以达到很高,但是容易碎;
金属码盘是在金属上刻出通道,不易碎,但是开的通孔有一定宽度要求,精度就有所限制,而且金属的热稳定性比较差,比玻璃差一个数量级;
塑料码盘是最经济的,成本低,但是精度,热稳定性,寿命等都要差一些。
光电增量式编码器通常有三个通道,通道A、通道B、通道Z;
顺时针旋转
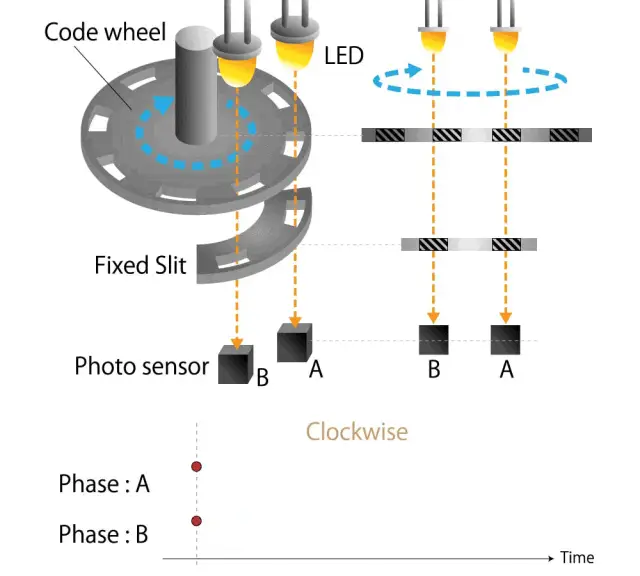
顺时针旋转时,如上面动画所示,无需多言;
逆时针旋转
?
?逆时针旋转时,如上面动画所示,无需多言。
增量式编码器是少不了Z相的,不然就不知道零位在哪里,带增量式编码器的伺服电机在运行前都需要找一下零位,就是依靠编码器上的Z相信号,Z相可以理解为零位。知道了零位,知道了旋转方向,结合脉冲的个数,就知道旋转角度了。
A、B、Z顺时针旋转产生的波形

A、B、Z逆时针旋转产生的波形?

增量式编码器倍频

增量式编码器有一个倍频计数,所谓倍频就是频率加倍的意思。
如果只利用A相信号的上升沿或者下降沿,则编码器旋转一圈的计数值就等于码盘的栅格数,X1波形所示,只利用B相的上升沿或者下降沿也是一样的;
如果利用A相信号的上升沿和下降沿,那信号频率就加倍了,实现2倍频,X2波形所示;
如果同时利用A相信号的上升沿下降沿和B相信号的上升沿下降沿,就可以实现4倍频,X4波形所示;
常见的2500线的编码器,也就是码盘上有2500个码道,通过4倍频,就可以得到2500*4 = 10000的分辨率。
三、光电绝对式编码器

绝对值编码器的编码是由机械位置决定的,每个位置式唯一的,它无需记忆位置,也不需要像Z相信号那样的参考点,使用的时候不需要一直计数,什么时候需要知道位置了就去读一下,因此绝对式编码器的抗干扰能力,数据的可靠性比增量式编码器就要高一些。
绝对式编码器又分为单圈绝对值编码器和多圈绝对值编码器。
单圈绝对值编码器:只能用于360度的旋转范围测量,超过360度就回到原点。
单圈绝对式编码器原理
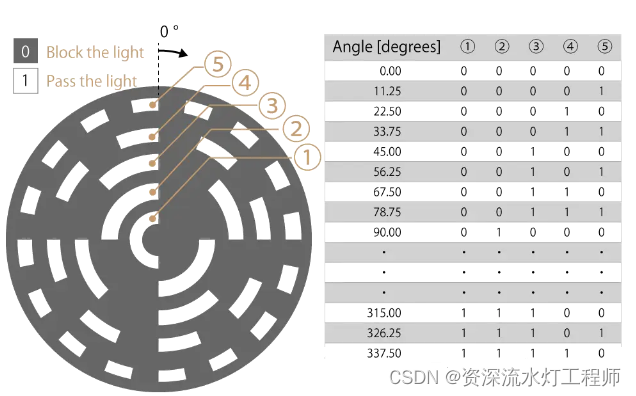
单圈绝对式编码器与增量式编码器结构是类似的,不同的地方是码盘和光电探测器。绝对式编码器的码盘上有N圈光通道刻线,每圈刻线依次以2线、4线、8线、16线这样的规律编排,通过读取每圈刻线的亮与暗,就可以获得2的N次方个唯一的编码,当旋转超过360度时,编码器又回到原点。
如下图所示的是有5排狭缝的码盘角度解析情况
多圈绝对式编码器原理
多圈绝对值编码器,是在在单圈的基础上,再增加圈数的编码,以扩大编码器的测量范围。 可以用不同的技术方案来检测圈数。常见的有机械绝对计圈和电子增量计圈两种。
机械绝对计圈:利用钟表齿轮的原理,当中心码盘旋转时通过齿轮传动另一组码盘转动,在单圈编码的基础上再增加圈数的编码,圈数是有范围限制的,当前常见的有4096圈和65536圈这两种。
电子增量计圈:通过电池给存储器供电,来达到多圈计数的目的,实际上就是单圈绝对,多圈增量,好处是省掉了一组机械齿轮,体积可以做的比较小。但这不是真正的绝对编码区。
四、磁电式编码器

磁性编码器通常也被称为磁电式编码器,是一种角度或者位移测量装置。其原理是采用磁阻或者霍尔元件对变化的磁性材料的角度或者位移进行测量。磁性材料角度或者位移的变化会引起一定电阻或者电压的变化,通过放大电路对变化量进行放大,通过处理器处理后输出脉冲信号或者模拟量信号,以达到测试的目的。
磁性码盘的磁极数,磁阻传感器的数量以及信号处理的方式决定了磁性编码器的分辨率。采用磁场原理产生信号的优势是信号不会收到灰尘,振动、温度的影响。
五、旋转变压器(旋转编码器)
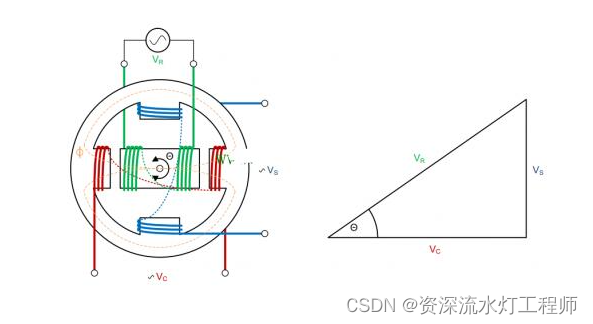
旋转变压器的原理
旋转变压器的工作原理与普通变压的工作原理基本相似,区别在于普通变压器的绕组是固定的,输出电压与输入电压比是一个常数。而旋转变压器的原边与副边绕组是随着转子的角位移发生相对位置的变化,因此其输出电压的大小也是随着转子的角位移变化,输出绕组的电压幅值与转子转角成正弦函数关系或者比例关系。
旋转变压器的优缺点:
相较于光电编码器,旋转变压器更适合于各种恶劣的环境,如油污,振动等环境。这些场合光电编码器的码盘容易被污染,使编码器的输出错误。
旋转编码器是模拟量传输,容易受噪音干扰,分辨率不高。
六、编码器的基本参数
编码器的分辨率
分辨率是指编码器能够分辨的最小单位。
对于增量式编码器,其分辨率为旋转一圈,编码器所产生的脉冲数,即Pulse Per Revolution,缩写PPR;
也可以用码盘上透光线槽的数目来表示分辨率,叫做多少线,常用的有5000线,6000线。
对于绝对式编码器,内部码盘所用的位数就是分辨率,单位是bit。这个位数就是码盘上有多少圈透光孔。1度==60角分==3600角秒。
编码器的精度
编码器的精度是指编码器每个读数与转轴实际位置间的最大误差,通常用角度、角分、角秒来表示,例如有些绝对式编码器参数表里会写±20″,这就表示编码器输出的读数与转轴实际位置之间存在±20角秒的误差。
编码器的精度由码盘刻线加工精度、转轴同心度、材料的温度特性、电路的响应等因素决定。
最大响应频率
最大响应频率是指编码器每秒输出的脉冲数,单位是Hz;计算公式为
????????????????最大响应频率 = 分辨率*轴转速/60
比如电机的编码器分辨率为100,转转速为120转每分钟,则相应频率为100*120/60 = 200Hz,在该转速下,编码器每秒输出200个脉冲。
信号输出形式
对于增量式编码器,每个通道的信号独立输出,输出电路形式有集电极开路输出、推挽输出、差分输出;
对于绝对式编码器,是直接输出几十位的二进制数,为了确保传输速率和信号质量,一般采用串行输出或者总线输出,如SSI、RS485、CANOPEN、Ethercat等。也有并行输出的,输出电路的形式与增量式编码器相同。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 2024年元旦节放假通知
- 天猫生意参谋的各模块功能
- 六、NPP/VIIRS夜光数据校正之去负值
- Java将PDF转换为文本
- Linux的基本命令
- element plus el-form双列布局及拓展任意布局
- 远程桌面连接Windows实例,提示“为安全考虑,已锁定该用户账户,原因是登录尝试或密码更改尝试过多”错误解决方案
- [Linux] 下载 linux 内置命令行工具的源码 (ps命令为例)
- codeforces 1904B
- 利用网络威胁情报增强网络安全态势