一些硬件知识(三)
uint8_t, uint32_t, 和 uint16_t 是 C 和 C++ 语言中的数据类型,它们分别表示无符号的 8 位、32 位和 16 位整数。这些数据类型定义在标准库 <stdint.h>(在 C 语言中)或 <cstdint>(在 C++ 中)。
uint8_t:无符号 8 位整数,也就是 0 到 255 的值范围。它通常用于表示一个字节的数据。
uint32_t:无符号 32 位整数,也就是 0 到 4,294,967,295 的值范围。这通常用于表示一个 32 位的数据。
uint16_t:无符号 16 位整数,也就是 0 到 65,535 的值范围。这通常用于表示一个 16 位的数据。
1位(bit)=1比特(bit),1字节(Byte)=8位(bit),因此,1位等于1/8字节,即0.125字节。
uint16_t表示16位,也就是2字节。
在C语言中,uint8_t, uint16_t, 和 int32_t 是无符号和有符号整数类型,它们的大小和范围取决于具体的编译器和平台。这些类型定义在标准库中,如 <stdint.h> 或 <cstdint>。
uint8_t:这是一个无符号8位整数类型,范围从0到255。通常,它占据1字节的内存,但这也取决于具体的编译器和平台。
uint16_t:这是一个无符号16位整数类型,范围从0到65535。通常,它占据2字节的内存。
int32_t:这是一个有符号32位整数类型,范围从-2147483648到2147483647。通常,它占据4字节的内存。
PFC电路,全称为功率因数校正电路,主要用于提高电路的功率因数,减少谐波含量,解决因容性负载导致电流波形严重畸变而产生的电磁干扰(EMI)和电磁兼容(EMC)问题。它通过对输入电流的波形进行控制,使其与输入电压波形同步,提高功率因数,从而降低无功功率,提高有功功率。
PFC电路分为无源PFC(也称被动式PFC)和有源PFC(也称主动式PFC)两种类型。无源PFC一般采用电感补偿方法使交流输入的基波电流与电压之间相位差减小来提高功率因数,但功率因数不是很高,只能达到0.7~0.8。有源PFC由电感电容及电子元器件组成,体积小,可以达到很高的功率因数,但成本要高出无源PFC一些。
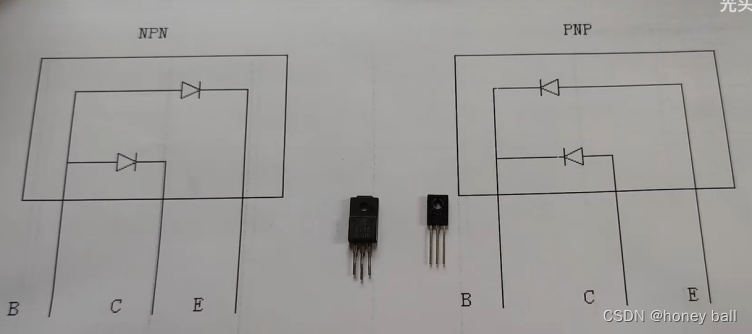
判断三极管是PNP还是NPN(发射极永远在外侧,连接BC两级,万用表蜂鸣器档压降为0.7V):
超级电容,也被称为电化学电容、双电层电容器、黄金电容或法拉电容,是从上世纪七、八十年代发展起来的通过极化电解质来储能的一种电化学元件。它不同于传统的化学电源,是一种介于传统电容器与电池之间、具有特殊性能的电源。超级电容主要依靠双电层和氧化还原赝电容电荷储存电能,其储能过程并不发生化学反应,这种储能过程是可逆的,也正因为此超级电容器可以反复充放电数十万次。超级电容的优点主要包括:充放电速度快,是电池的100倍,可以在短时间内快速充满和放出大量电能。单位功率传输质量更低,功率密度更高,这意味着它可以提供更高的输出功率和更大的能量存储密度。充放电转换效率高,能量以电能而非化学能的形式储存,因此能量损失较少,能够更加高效地将电能传输和储存。然而,超级电容也存在一些缺点:不可以用于交流电路,仅限于直流电路使用。
光耦合器根据线性特性可分为线性光耦合器和非线性光耦合器。
线性光耦的隔离原理与普通光耦没有太大区别,只是线性光耦增加了一个受光电路进行反馈。这样,两个光接收电路的非线性特性是相同的,直接路径的非线性可以被反馈路径的非线性抵消,从而达到线性隔离的目的。 线性光耦可分为反馈型和非反馈型。常用的反馈线性光耦合器有HCNR200、HCNR201、TLP532等。常用的无反馈线性光耦合器有TLP521、PC111、PC817A-C等。非线性光耦的电流传输特性曲线是非线性的,这类光耦适合于开关信号的传输,不适合于传输模拟量。常用的4N系列光耦合器属于非线性光耦 。
【实验测试光电耦合器的线性和非线性,性能好坏,一目了然。】https://www.bilibili.com/video/BV1YR4y1x7yp?vd_source=3cc3c07b09206097d0d8b0aefdf07958
电机状态结构体 :
typedef struct {
????__IO uint8_t ???run_flag; ??????/* 运行标志 */
????__IO uint8_t ???locked_rotor; ??/* 堵转标记 */
????__IO uint8_t ???step_sta; ??????/* 本次霍尔状态 */
????__IO uint8_t ???hall_single_sta;/* 单个霍尔状态 */
????__IO uint8_t ???hall_sta_edge; ?/* 单个霍尔状态跳变 */
????__IO uint8_t ???step_last; ?????/* 上次霍尔状态 */
????__IO uint8_t ???dir; ???????????/* 电机旋转方向 */
????__IO int32_t ???pos; ???????????/* 电机位置 */
????__IO int32_t ???speed; ?????????/* 电机速度 */
????__IO int16_t ???current; ???????/* 电机速度 */
????__IO uint16_t ??pwm_duty; ??????/* 电机占空比 */
????__IO uint32_t ??hall_keep_t; ???/* 霍尔保持时间 */
????__IO uint32_t ??hall_pul_num; ??/* 霍尔传感器脉冲数 */
????__IO uint32_t ??lock_time; ?????/* 电机堵转时间 */
????__IO uint32_t ??no_single;
????__IO uint32_t ??count_j;
} _bldc_obj;
_bldc_obj g_bldc_motor1 = {STOP,0,0,CCW,0,0,0,0,0,0}; ??/* 电机结构体初始值 */
?g_atimx_handle.Instance->CCR1 = g_bldc_motor1.pwm_duty;

设计RAM这种引脚密集的时候最好加上焊盘测试点,便于后期调试。
XT60插头极限电流可达120A,在BLDC等大功率场景中作为供电非常合适。

串行通讯是一种通讯方式,它是指数据一位一位地顺序传输,实现信息的传递。在串行通讯中,数据是在单条线路上进行传输的,一次只传输一位数据。与之相对的是并行通讯,它是在多条线路上同时传输数据。常用的串行通讯方式包括I2C、SPI、UART,RS-485等
CPU最小系统应包括哪些部分?CPU、电源,时钟,程序存储器、数据存储器
单片机的基本操作周期和外部时钟周期的关系是:一个基本操作周期由12个外部时钟周期组成。
目前可编程器件通用的硬件描述语言主要有两种:VHDL和Verilog HDL。这两种语言都是用于描述数字电路和系统的行为和结构的语言,被广泛应用于数字电路设计、集成电路设计、FPGA设计等领域。
与通用微处理器相比,DSP有什么特点:数据处理能力更强,控制能力较差 ??
、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、
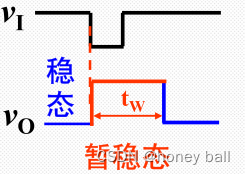
单稳态触发器(One-Shot Trigger)是一种数字电路中的触发器,具有单稳态工作特性。单稳态触发器有两种状态:稳态和暂态。在未受触发信号作用时,触发器保持稳态不变;当受到触发信号作用时,触发器由稳态翻转到暂态,并在一定时间后自动返回到稳态。这个暂态持续时间称为“脉冲宽度”或“定时时间”。单稳态触发器电路由暂稳态自动变回稳态;而需要触发信号才能由稳态变成暂稳态,脉宽持续时间只取决于电路结构输出脉冲宽度tw?=0.7RC
单稳态触发器广泛应用于脉冲整形、脉冲定时、噪声消除、电平检测等领域。例如,在工业控制中,单稳态触发器可以用于计数器和触发器的复位,解决长时间电平变化不能使计数器或触发器可靠复位的问题。此外,利用单稳态触发器的输出脉冲宽度,可以实现定时(对于一个高电平有效的电路,利用单稳态触发器的输出脉宽t w )、延时( 对于一个下降沿有效的电路,利用单稳态触发器的输出脉宽t w ),
噪声消除(工作原理:当单稳态触发器被出发后,会保持一个t w时间的高电平输出,期间无论输入怎样变化都不会影响输出,这样就消除了部分噪声)

单稳态触发器和单片机发出的PWM各有其优点。单稳态触发器的优点:
具有单稳态性质:当输入信号发生变化时,输出信号会保持不变一段时间。
容易实现:可以使用少量的逻辑门电路来构造单稳态触发器。
应用广泛:单稳态触发器可以将一个瞬态输入信号转换为一个固定宽度的脉冲,在很多电子设备中都有应用,例如数字逻辑电路中的时序控制、计数器的启动、断电、复位等。
PWM(脉宽调制)的优点:
简化硬件电路:PWM功能简化了硬件电路,降低了硬件的成品。利用软件PWM,不需要外部的硬件PWM和电压比较器,只需要功率MOSFET、续流磁芯、储能电容等元件,大大简化了外围电路。
可控涡流大小:在PWM控制充电的过程中,点偏激可实时检测ADC端口上充电电路的大小,并根据充电电路大小与设定的涡流进行比较,以决定PWM占空比的调整方向。
高精度和灵活性:通过调整PWM信号的占空比,可以实现高精度的电压和电流调节。此外,PWM还可以实现多种不同的控制策略,如速度控制、温度控制等。
可靠性高:PWM信号的占空比是连续变化的,避免了开关式控制中可能出现的火花触点等问题,提高了系统的可靠性。
、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、
施密特触发器是一种具有特殊功能的电子器件,主要用于脉冲整形、鉴幅和抗干扰等方面。它能够将一个缓慢变化的输入信号转换成一组开关电平信号,常用于数字电路和模拟电路的接口。
施密特触发器有两个稳定状态,但与一般触发器不同的是,施密特触发器采用电位触发方式,其状态由输入信号电位维持。对于负向递减和正向递增两种不同变化方向的输入信号,施密特触发器有不同的阈值电压。因此,施密特触发器具有滞回特性,能够有效地抑制噪声和干扰。
施密特触发器广泛应用于信号的整形、滤波、检测和控制等方面,提高了电子系统的可靠性和稳定性。

、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、
单片机的P0口是地址和数据复用的,与外部程序存储器的正确连接方式是将P0口作为低8位地址和数据总线,P2口作为高8位地址总线。同时,需要将P0口的P0.0、P0.1和P0.2这3个端口引到译码器件的输入端,作为数据存储器件的片选择控制线,与单片机的其他控制端口一起形成控制总线。这样,通过数据总线、地址总线和控制总线这3个总线,单片机可以实现片外256 KB数据存储器的扩展。
说明RS-232和RS-485的主要差别。在相同传输速度下,哪一种传输距离更远?
RS-232是利用传输信号线与公共地之间的电压差传输信号,一般用于20m以内的通信。在发送数据时,发送端驱动器输出正电平在+5~+15V,负电平在-5~-15V电平。RS-485是利用传输信号线之间的电压差传输信号,由于两根平行线可以抑制共模干扰所以RS-485传输距离更远可达千米级。发送驱动器A、B之间的正电平在+2~+6V,是一个逻辑状态,负电平在-2~6V,是另一个逻辑状态
RS485接口组成的半双工网络,任何时候只能有一点处于发送状态一般只需二根连线(我们一般叫AB线),所以RS485接口均采用屏蔽双绞线传输。
RS-485 与 RS-232的区别(总结),看了就明白 (zhihu.com)
TTL电平的输入电平标准如下:
输出L:<0.8V;H:>2.4V。
输入L:<1.2V;H:>2.0V。
因此,TTL电平的输入低电平的噪声容限就只有(0.8-0)/2=0.4V,高电平的噪声容限为(5-2.4)/2=1.3V。
在一个高速CPU(例如MPC860)的系统,包括CPU、SDRAM、FLASH和其他外设,CPU程序应放在SDRAM还是FLASH中运行?为什么?
应放在SDRAM中运行。因为目前FLASH的访问延时约为100ns,而SDRAM的访问延时仅几ns,程序放在FLASH中运行时,CPU将花费大量的时钟周期取指令,会大大降低CPU的运行速度。一般说来,FLASH中的程序只在CPU启动时执行,CPU启动后可将FLASH中的程序搬运到SDRAM中继续执行。
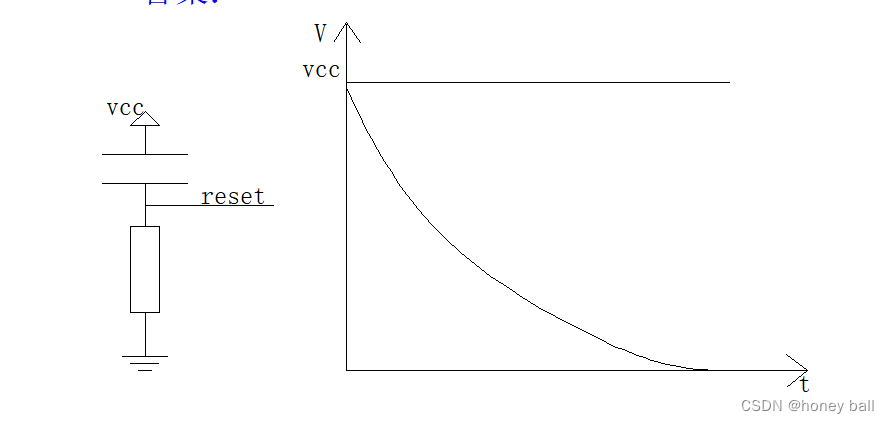
一种复位电路,高电平有效,及其输出波形:
当新焊的板上的单片机程序不跑时,应检查哪些方面?
首先检查电源是否正常供电,然后检查复位是否解除,时钟是否正常;如果这些都正常,再检查数据、地址线。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 搭配购买——并查集+01背包(洛谷P1455)土豆片的算法之路
- 对话面试官----jvm模型
- 跨境电商的人性化之旅:为何品牌需更贴近消费者心声
- 【DWJ_1703225514】基于Sklearn航空公司服务质量分析
- KNN算法及其优缺点
- 多微信号定时发圈:让朋友圈营销更简单!
- KMP算法学习
- List系列集合
- 2023年腾讯云服务器年终秒杀活动:2核4G5M的轻量服务器756元/3年
- 开源免费无广告Gopeed,现代化的高速下载器,支持(HTTP、BitTorrent、Magnet)等多种协议下载,开源免费、无广告、高度可定制、不限速。