倾斜摄影三维模型重建的几何坐标变换技术方法浅析
倾斜摄影三维模型重建的几何坐标变换技术方法浅析

倾斜摄影三维模型数据的坐标变换是将相机坐标系下获取的倾斜摄影图像转换为地理坐标系下的三维模型数据,以实现地理空间信息的表达与分析。在实际应用中,需要进行坐标变换的主要包括航片图像、相机姿态参数和控制点坐标等数据。本文将对倾斜摄影三维模型数据的坐标变换实现方法进行浅析。
1、航片图像的坐标变换:航片图像是倾斜摄影三维模型数据的基础,通过将航片图像的像素坐标转换为地理坐标系下的坐标,可以实现航片图像与真实地理位置的关联。常用的实现方法有以下几种:
内外参数法:通过相机内外参数的精确测量和计算,将航片图像的像素坐标转换为物方坐标系下的坐标。这种方法需要事先测量相机内外参数,并进行准确的相机标定,适用于要求较高的精度和稳定性。
特征点匹配法:通过在航片图像中提取一些显著特征点,并与地面控制点进行匹配,从而实现航片图像的坐标变换。这种方法不依赖相机内外参数的精确测量,但对特征点的提取和匹配要求较高。
区域匹配法:通过在航片图像中提取一定大小的区域,并与同一地物的其他航片图像区域进行匹配,实现航片图像的坐标变换。这种方法在处理无法提取明显特征点的场景(如植被丰富的地区)时具有优势。
2、相机姿态参数的坐标变换:相机姿态参数包括相机的位置和姿态(即位移和旋转),它们决定了航片图像的观测方向和视角。将相机姿态参数转换至地理坐标系下可以实现相机位置与真实地理位置的对应关系。常用的实现方法有以下几种:
全球卫星定位系统(GPS)定位:通过使用GPS接收器来测量无人机的位置和姿态,将相机的位置和姿态与地理坐标系进行对应。这种方法能够提供较高的定位精度,尤其适用于大范围的倾斜摄影任务。
惯性导航系统(INS)定位:通过使用惯性测量单元(IMU)来测量无人机的加速度和角速度,进而估计无人机的位置和姿态,并将其与地理坐标系进行对应。这种方法适用于小范围的倾斜摄影任务。
视觉里程计(VO)定位:通过利用航片图像的连续帧之间的特征点或特征描述子的变化,估计无人机的位置和姿态,并将其与地理坐标系进行对应。这种方法在没有GPS信号或IMU的情况下也能实现定位。
3、控制点坐标的坐标变换:控制点是用于验证和校正倾斜摄影三维模型数据的重要参考信息。将控制点的像素坐标转换为地理坐标系下的坐标,可以实现控制点与真实地理位置的对应。常用的实现方法有以下几种:
直接测量法:通过在现场对控制点进行精确的测量,获取其地理坐标,并与航片图像中的像素坐标进行对应。这种方法要求现场测量的精度高,适用于少量控制点的场景。
差分全球定位系统(DGPS)测量法:通过使用差分GPS接收器对控制点进行测量,获取其地理坐标,并与航片图像中的像素坐标进行对应。这种方法能够提供较高的定位精度,适用于大范围的倾斜摄影任务。
区域匹配法:通过在航片图像中提取控制点附近的区域,并与其他航片图像中的相应区域进行匹配,实现控制点的坐标变换。这种方法可以在航片图像中找到更多的参考点,提高坐标变换的精度和可靠性。
综上所述,倾斜摄影三维模型数据的坐标变换涉及到航片图像、相机姿态参数和控制点坐标等多个数据的转换。通过合理选择实现方法,如内外参数法、特征点匹配法、GPS定位、DGPS测量等,可以实现航片图像、相机姿态参数和控制点坐标间的坐标变换,从而实现倾斜摄影三维模型数据的地理空间表达与分析。
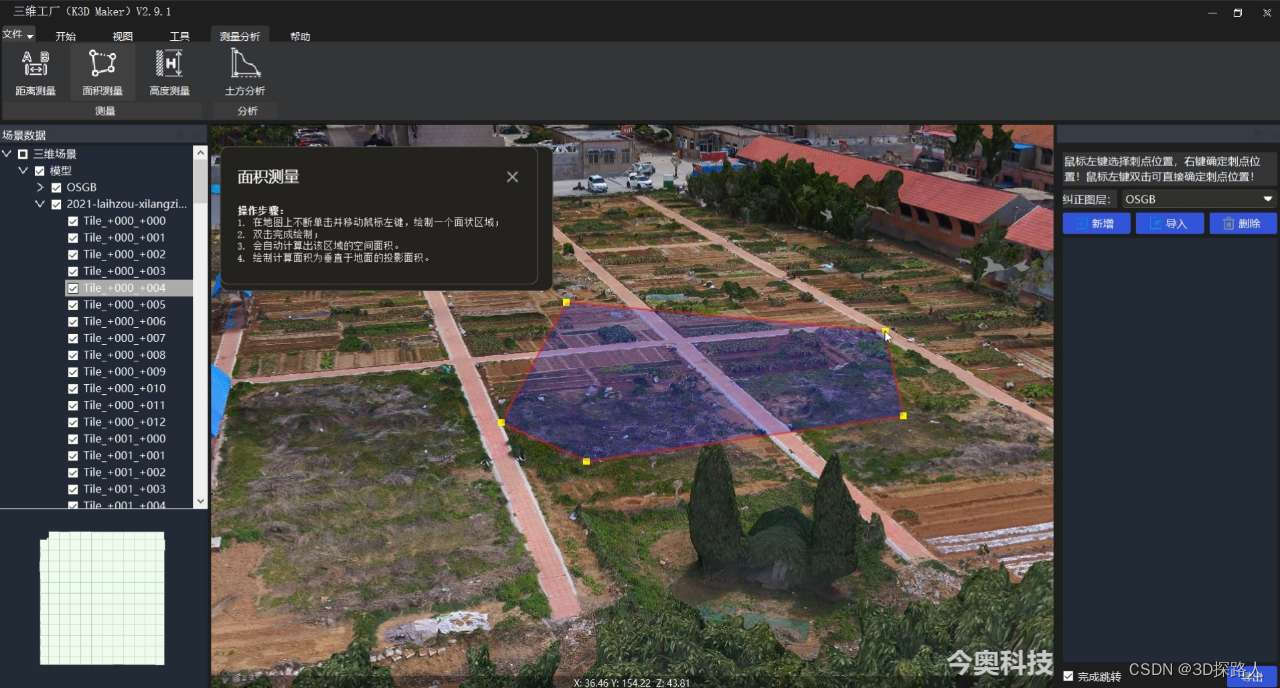
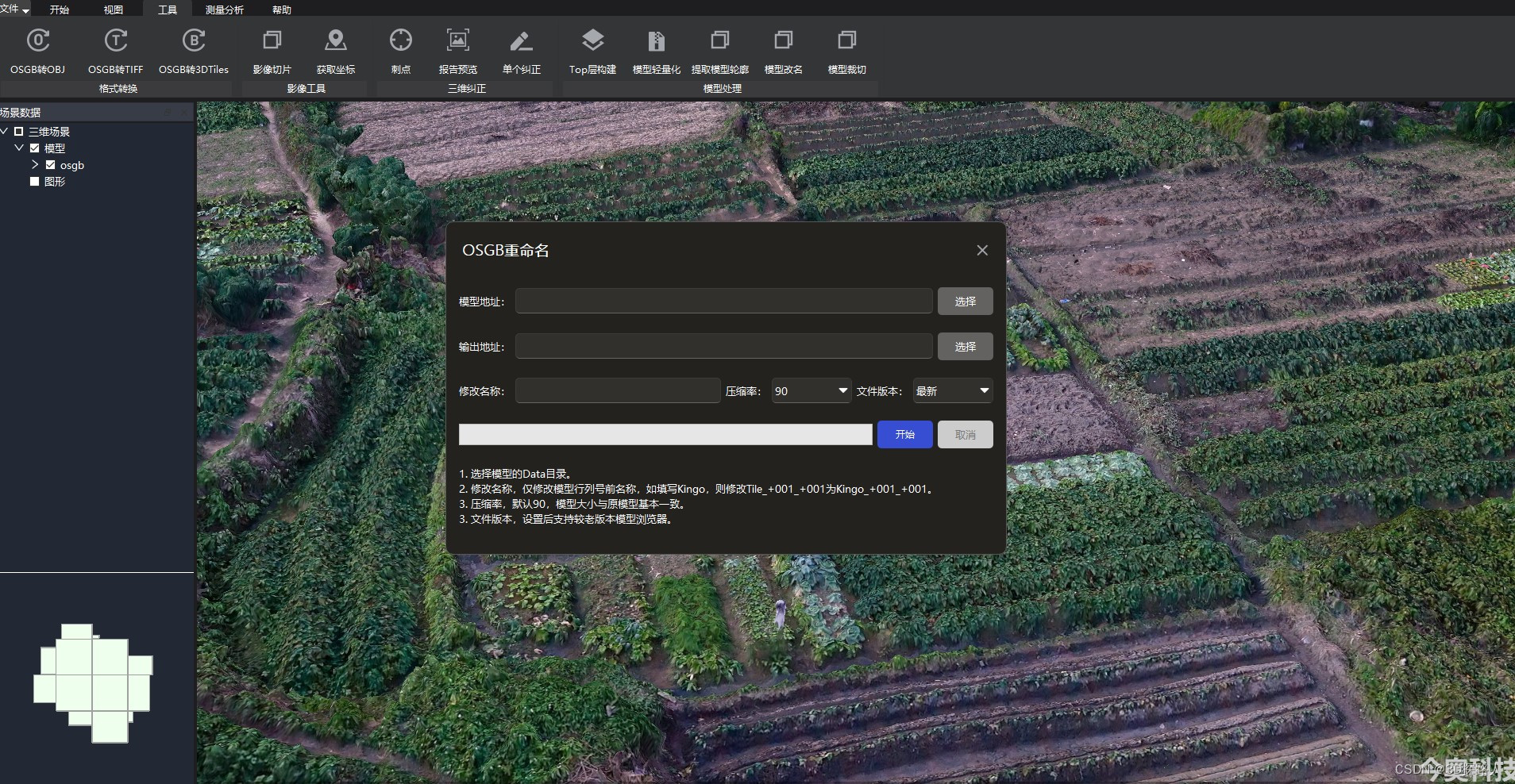
三维工厂软件介绍:

三维工厂K3DMaker是一款国内团队开发的三维模型浏览、分析、轻量化、顶层合并构建、根节点合并、几何校正(纠正)、格式转换、调色裁切、坐标转换等功能专业处理软件。可以进行三维模型的网格简化、纹理压缩、层级优化等操作,从而实现三维模型轻量化。轻量化压缩比大,模型轻量化效率高,自动化处理能力高;采用多种算法对三维模型进行几何精纠正处理,精度高,处理速度快,超大模型支持;优秀数据处理和转换工具,支持将OSGB格式三维模型转换为3DTiles等格式,可快速进行转换。优点在于免费、功能强大、支持多种文件格式,适用于多种领域。与常用三维重建软件配合,对三维模型进行优化处理,提高模型质量,丰富数据成果。来体验一下这个软件吧!

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!