STM32CubeMX mpu6050驱动
发布时间:2024年01月13日
一、mpu6050接线
3.3->vcc
gnd->gnd
pb10->scl
pb11->sda
gnd->ad0
二、cubeMX配置
sys配置,使用系统滴答,打开调试

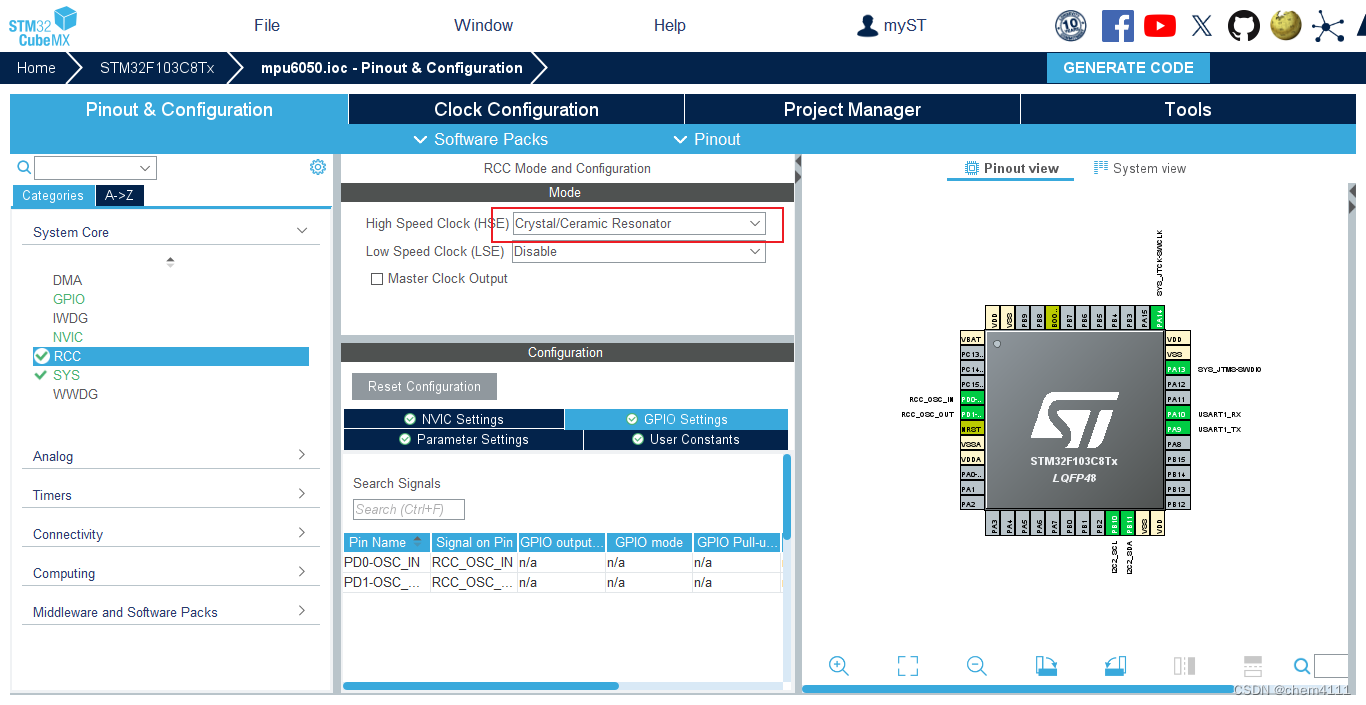
RCC配置
时钟配置

?i2c配置
?uart配置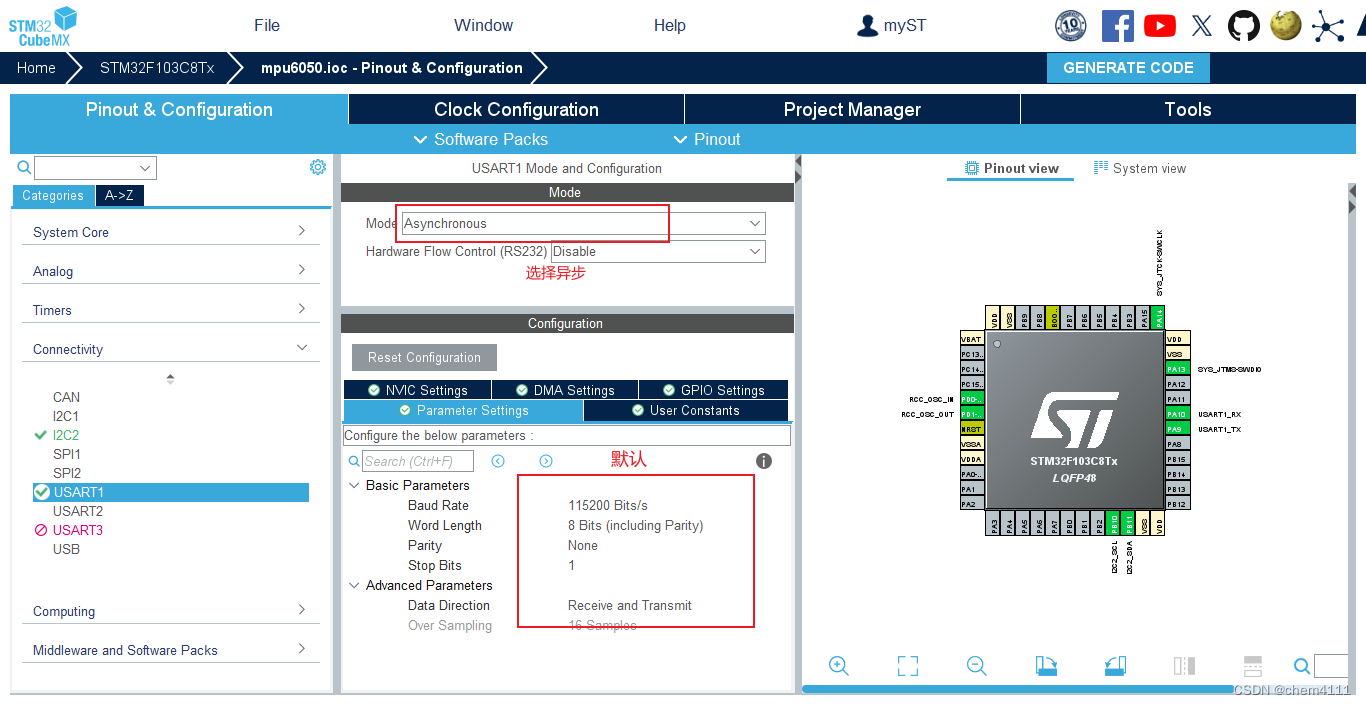
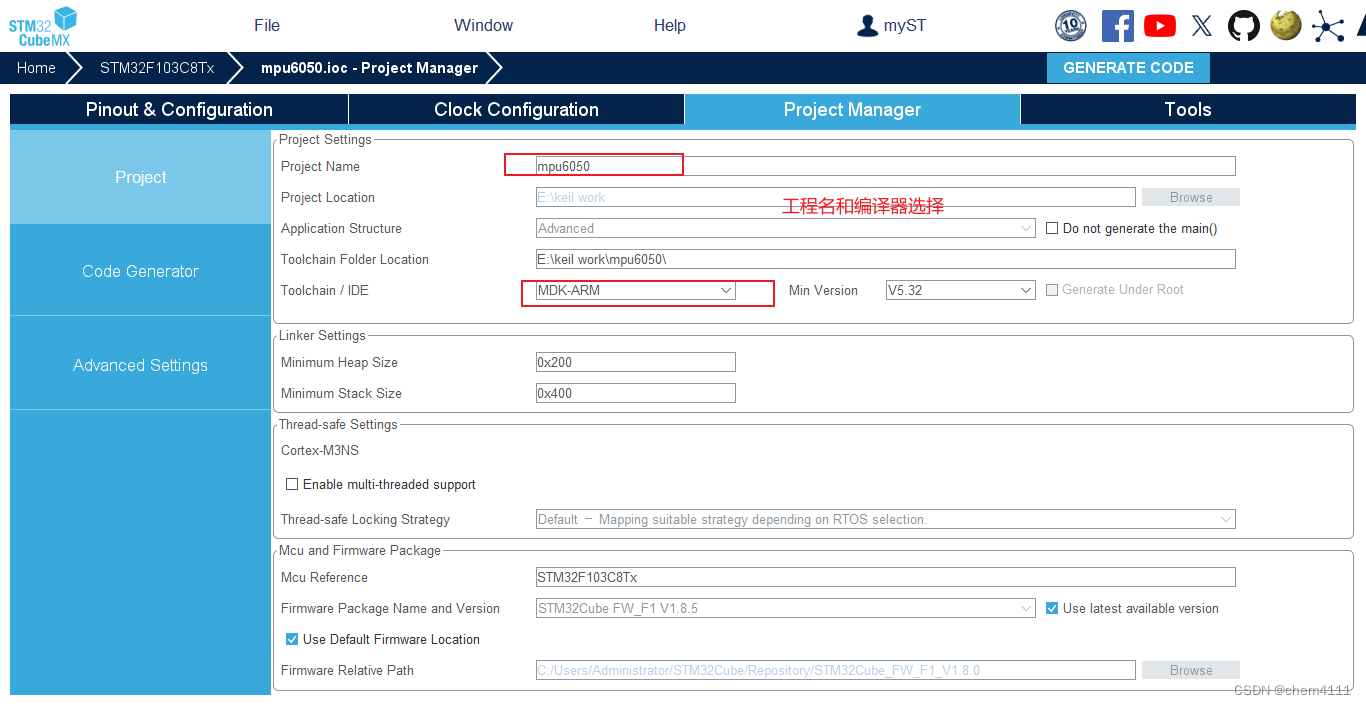
?生成工程
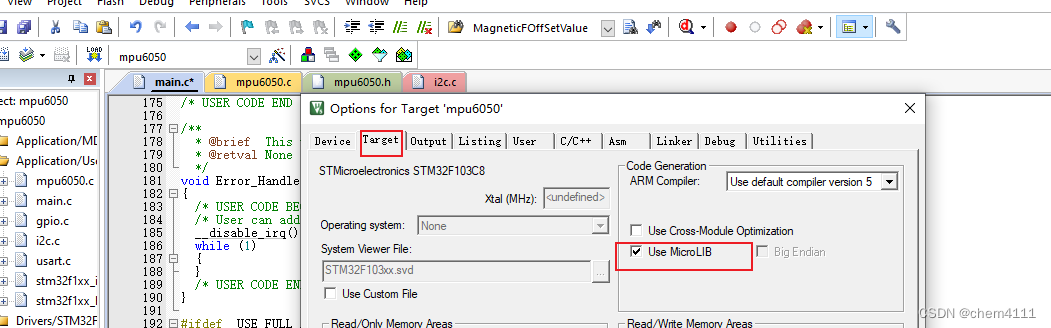
三、keil代码?
mpu6050.h
/*
* mpu6050.h
*
* Created on: Nov 13, 2019
* Author: Bulanov Konstantin
*/
#ifndef INC_GY521_H_
#define INC_GY521_H_
#endif /* INC_GY521_H_ */
#include <stdint.h>
#include "i2c.h"
// MPU6050 structure
typedef struct {
int16_t Accel_X_RAW;
int16_t Accel_Y_RAW;
int16_t Accel_Z_RAW;
double Ax;
double Ay;
double Az;
int16_t Gyro_X_RAW;
int16_t Gyro_Y_RAW;
int16_t Gyro_Z_RAW;
double Gx;
double Gy;
double Gz;
float Temperature;
double KalmanAngleX;
double KalmanAngleY;
} MPU6050_t;
// Kalman structure
typedef struct {
double Q_angle;
double Q_bias;
double R_measure;
double angle;
double bias;
double P[2][2];
} Kalman_t;
uint8_t MPU6050_Init(I2C_HandleTypeDef *I2Cx);
void MPU6050_Read_Accel(I2C_HandleTypeDef *I2Cx, MPU6050_t *DataStruct);
void MPU6050_Read_Gyro(I2C_HandleTypeDef *I2Cx, MPU6050_t *DataStruct);
void MPU6050_Read_Temp(I2C_HandleTypeDef *I2Cx, MPU6050_t *DataStruct);
void MPU6050_Read_All(I2C_HandleTypeDef *I2Cx, MPU6050_t *DataStruct);
double Kalman_getAngle(Kalman_t *Kalman, double newAngle, double newRate, double dt);
?mpu6050.c
/*
* mpu6050.c
*
* Created on: Nov 13, 2019
* Author: Bulanov Konstantin
*
* Contact information
* -------------------
*
* e-mail : leech001@gmail.com
*/
/*
* |---------------------------------------------------------------------------------
* | Copyright (C) Bulanov Konstantin,2019
* |
* | This program is free software: you can redistribute it and/or modify
* | it under the terms of the GNU General Public License as published by
* | the Free Software Foundation, either version 3 of the License, or
* | any later version.
* |
* | This program is distributed in the hope that it will be useful,
* | but WITHOUT ANY WARRANTY; without even the implied warranty of
* | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* | GNU General Public License for more details.
* |
* | You should have received a copy of the GNU General Public License
* | along with this program. If not, see <http://www.gnu.org/licenses/>.
* |
* | Kalman filter algorithm used from https://github.com/TKJElectronics/KalmanFilter
* |---------------------------------------------------------------------------------
*/
#include <math.h>
#include "mpu6050.h"
#define RAD_TO_DEG 57.295779513082320876798154814105
#define WHO_AM_I_REG 0x75
#define PWR_MGMT_1_REG 0x6B
#define SMPLRT_DIV_REG 0x19
#define ACCEL_CONFIG_REG 0x1C
#define ACCEL_XOUT_H_REG 0x3B
#define TEMP_OUT_H_REG 0x41
#define GYRO_CONFIG_REG 0x1B
#define GYRO_XOUT_H_REG 0x43
// Setup MPU6050
#define MPU6050_ADDR 0xD0
const uint16_t i2c_timeout = 100;
const double Accel_Z_corrector = 14418.0;
uint32_t timer;
Kalman_t KalmanX = {
.Q_angle = 0.001f,
.Q_bias = 0.003f,
.R_measure = 0.03f
};
Kalman_t KalmanY = {
.Q_angle = 0.001f,
.Q_bias = 0.003f,
.R_measure = 0.03f,
};
uint8_t MPU6050_Init(I2C_HandleTypeDef *I2Cx) {
uint8_t check;
uint8_t Data;
// check device ID WHO_AM_I
HAL_I2C_Mem_Read(I2Cx, MPU6050_ADDR, WHO_AM_I_REG, 1, &check, 1, i2c_timeout);
if (check == 104) // 0x68 will be returned by the sensor if everything goes well
{
// power management register 0X6B we should write all 0's to wake the sensor up
Data = 0;
HAL_I2C_Mem_Write(I2Cx, MPU6050_ADDR, PWR_MGMT_1_REG, 1, &Data, 1, i2c_timeout);
// Set DATA RATE of 1KHz by writing SMPLRT_DIV register
Data = 0x07;
HAL_I2C_Mem_Write(I2Cx, MPU6050_ADDR, SMPLRT_DIV_REG, 1, &Data, 1, i2c_timeout);
// Set accelerometer configuration in ACCEL_CONFIG Register
// XA_ST=0,YA_ST=0,ZA_ST=0, FS_SEL=0 -> � 2g
Data = 0x00;
HAL_I2C_Mem_Write(I2Cx, MPU6050_ADDR, ACCEL_CONFIG_REG, 1, &Data, 1, i2c_timeout);
// Set Gyroscopic configuration in GYRO_CONFIG Register
// XG_ST=0,YG_ST=0,ZG_ST=0, FS_SEL=0 -> � 250 �/s
Data = 0x00;
HAL_I2C_Mem_Write(I2Cx, MPU6050_ADDR, GYRO_CONFIG_REG, 1, &Data, 1, i2c_timeout);
return 0;
}
return 1;
}
void MPU6050_Read_Accel(I2C_HandleTypeDef *I2Cx, MPU6050_t *DataStruct) {
uint8_t Rec_Data[6];
// Read 6 BYTES of data starting from ACCEL_XOUT_H register
HAL_I2C_Mem_Read(I2Cx, MPU6050_ADDR, ACCEL_XOUT_H_REG, 1, Rec_Data, 6, i2c_timeout);
DataStruct->Accel_X_RAW = (int16_t) (Rec_Data[0] << 8 | Rec_Data[1]);
DataStruct->Accel_Y_RAW = (int16_t) (Rec_Data[2] << 8 | Rec_Data[3]);
DataStruct->Accel_Z_RAW = (int16_t) (Rec_Data[4] << 8 | Rec_Data[5]);
/*** convert the RAW values into acceleration in 'g'
we have to divide according to the Full scale value set in FS_SEL
I have configured FS_SEL = 0. So I am dividing by 16384.0
for more details check ACCEL_CONFIG Register ****/
DataStruct->Ax = DataStruct->Accel_X_RAW / 16384.0;
DataStruct->Ay = DataStruct->Accel_Y_RAW / 16384.0;
DataStruct->Az = DataStruct->Accel_Z_RAW / Accel_Z_corrector;
}
void MPU6050_Read_Gyro(I2C_HandleTypeDef *I2Cx, MPU6050_t *DataStruct) {
uint8_t Rec_Data[6];
// Read 6 BYTES of data starting from GYRO_XOUT_H register
HAL_I2C_Mem_Read(I2Cx, MPU6050_ADDR, GYRO_XOUT_H_REG, 1, Rec_Data, 6, i2c_timeout);
DataStruct->Gyro_X_RAW = (int16_t) (Rec_Data[0] << 8 | Rec_Data[1]);
DataStruct->Gyro_Y_RAW = (int16_t) (Rec_Data[2] << 8 | Rec_Data[3]);
DataStruct->Gyro_Z_RAW = (int16_t) (Rec_Data[4] << 8 | Rec_Data[5]);
/*** convert the RAW values into dps (�/s)
we have to divide according to the Full scale value set in FS_SEL
I have configured FS_SEL = 0. So I am dividing by 131.0
for more details check GYRO_CONFIG Register ****/
DataStruct->Gx = DataStruct->Gyro_X_RAW / 131.0;
DataStruct->Gy = DataStruct->Gyro_Y_RAW / 131.0;
DataStruct->Gz = DataStruct->Gyro_Z_RAW / 131.0;
}
void MPU6050_Read_Temp(I2C_HandleTypeDef *I2Cx, MPU6050_t *DataStruct) {
uint8_t Rec_Data[2];
int16_t temp;
// Read 2 BYTES of data starting from TEMP_OUT_H_REG register
HAL_I2C_Mem_Read(I2Cx, MPU6050_ADDR, TEMP_OUT_H_REG, 1, Rec_Data, 2, i2c_timeout);
temp = (int16_t) (Rec_Data[0] << 8 | Rec_Data[1]);
DataStruct->Temperature = (float) ((int16_t) temp / (float) 340.0 + (float) 36.53);
}
void MPU6050_Read_All(I2C_HandleTypeDef *I2Cx, MPU6050_t *DataStruct) {
uint8_t Rec_Data[14];
int16_t temp;
// Read 14 BYTES of data starting from ACCEL_XOUT_H register
HAL_I2C_Mem_Read(I2Cx, MPU6050_ADDR, ACCEL_XOUT_H_REG, 1, Rec_Data, 14, i2c_timeout);
DataStruct->Accel_X_RAW = (int16_t) (Rec_Data[0] << 8 | Rec_Data[1]);
DataStruct->Accel_Y_RAW = (int16_t) (Rec_Data[2] << 8 | Rec_Data[3]);
DataStruct->Accel_Z_RAW = (int16_t) (Rec_Data[4] << 8 | Rec_Data[5]);
temp = (int16_t) (Rec_Data[6] << 8 | Rec_Data[7]);
DataStruct->Gyro_X_RAW = (int16_t) (Rec_Data[8] << 8 | Rec_Data[9]);
DataStruct->Gyro_Y_RAW = (int16_t) (Rec_Data[10] << 8 | Rec_Data[11]);
DataStruct->Gyro_Z_RAW = (int16_t) (Rec_Data[12] << 8 | Rec_Data[13]);
DataStruct->Ax = DataStruct->Accel_X_RAW / 16384.0;
DataStruct->Ay = DataStruct->Accel_Y_RAW / 16384.0;
DataStruct->Az = DataStruct->Accel_Z_RAW / Accel_Z_corrector;
DataStruct->Temperature = (float) ((int16_t) temp / (float) 340.0 + (float) 36.53);
DataStruct->Gx = DataStruct->Gyro_X_RAW / 131.0;
DataStruct->Gy = DataStruct->Gyro_Y_RAW / 131.0;
DataStruct->Gz = DataStruct->Gyro_Z_RAW / 131.0;
// Kalman angle solve
double dt = (double) (HAL_GetTick() - timer) / 1000;
timer = HAL_GetTick();
double roll;
double roll_sqrt = sqrt(
DataStruct->Accel_X_RAW * DataStruct->Accel_X_RAW + DataStruct->Accel_Z_RAW * DataStruct->Accel_Z_RAW);
if (roll_sqrt != 0.0) {
roll = atan(DataStruct->Accel_Y_RAW / roll_sqrt) * RAD_TO_DEG;
} else {
roll = 0.0;
}
double pitch = atan2(-DataStruct->Accel_X_RAW, DataStruct->Accel_Z_RAW) * RAD_TO_DEG;
if ((pitch < -90 && DataStruct->KalmanAngleY > 90) || (pitch > 90 && DataStruct->KalmanAngleY < -90)) {
KalmanY.angle = pitch;
DataStruct->KalmanAngleY = pitch;
} else {
DataStruct->KalmanAngleY = Kalman_getAngle(&KalmanY, pitch, DataStruct->Gy, dt);
}
if (fabs(DataStruct->KalmanAngleY) > 90)
DataStruct->Gx = -DataStruct->Gx;
DataStruct->KalmanAngleX = Kalman_getAngle(&KalmanX, roll, DataStruct->Gy, dt);
}
double Kalman_getAngle(Kalman_t *Kalman, double newAngle, double newRate, double dt) {
double rate = newRate - Kalman->bias;
Kalman->angle += dt * rate;
Kalman->P[0][0] += dt * (dt * Kalman->P[1][1] - Kalman->P[0][1] - Kalman->P[1][0] + Kalman->Q_angle);
Kalman->P[0][1] -= dt * Kalman->P[1][1];
Kalman->P[1][0] -= dt * Kalman->P[1][1];
Kalman->P[1][1] += Kalman->Q_bias * dt;
double S = Kalman->P[0][0] + Kalman->R_measure;
double K[2];
K[0] = Kalman->P[0][0] / S;
K[1] = Kalman->P[1][0] / S;
double y = newAngle - Kalman->angle;
Kalman->angle += K[0] * y;
Kalman->bias += K[1] * y;
double P00_temp = Kalman->P[0][0];
double P01_temp = Kalman->P[0][1];
Kalman->P[0][0] -= K[0] * P00_temp;
Kalman->P[0][1] -= K[0] * P01_temp;
Kalman->P[1][0] -= K[1] * P00_temp;
Kalman->P[1][1] -= K[1] * P01_temp;
return Kalman->angle;
};
main.c
定义mpu6050初始化,和串口重定向
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "mpu6050.h"
int fputc(int ch,FILE *f)
{
HAL_UART_Transmit(&huart1,(uint8_t*)&ch,1,0xFFFF);
return ch;
}
/* USER CODE END Includes */实例化结构体?
/* USER CODE BEGIN 0 */
MPU6050_t MPU6050;
/* USER CODE END 0 */初始化
/* USER CODE BEGIN 2 */
MPU6050_Init(&hi2c2);
/* USER CODE END 2 */while
/* USER CODE BEGIN WHILE */
while (1)
{
// 读取所有参数
MPU6050_Read_All(&hi2c2, &MPU6050);
printf("加速度 x:%.2f \t y:%.2f \t z:%.2f\n",MPU6050.Ax,MPU6050.Ay,MPU6050.Az);
printf("陀螺仪 x:%.2f \t y:%.2f \t z:%.2f\n",MPU6050.Gx,MPU6050.Gy,MPU6050.Gz);
printf("温度 %.2f\n",MPU6050.Temperature);
// 读取加速度
MPU6050_Read_Accel(&hi2c2, &MPU6050);
printf("只更新加速度 x:%.2f \t y:%.2f \t z:%.2f\n",MPU6050.Ax,MPU6050.Ay,MPU6050.Az);
// 读取陀螺仪
MPU6050_Read_Gyro(&hi2c2, &MPU6050);
printf("只更新陀螺仪 x:%.2f \t y:%.2f \t z:%.2f\n",MPU6050.Gx,MPU6050.Gy,MPU6050.Gz);
// 读取温度
MPU6050_Read_Temp(&hi2c2, &MPU6050);
printf("只更新温度 %.2f\n",MPU6050.Temperature);
HAL_Delay(300);
/* USER CODE END WHILE */重定向要打开?

?链接: https://pan.baidu.com/s/1DDjaD1SAavYqd50lnNunqA?pwd=k46f 提取码: k46f?
文章来源:https://blog.csdn.net/weixin_46286415/article/details/135569196
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 集成SpringCloudAlibaba短信服务 短信验证码
- Ubuntu 常用命令之 locate 命令用法介绍
- 【INF4000】Data Visualisation
- python3ide手机安卓版下载,python3下载手机安卓版
- postgresql16 物理复制与逻辑复制的实现和对比
- 帆软后台(外观配置-主题)文件上传漏洞
- 【C++】入门C++前想要了解的小知识
- pytorch08:学习率调整策略
- 计算机视觉(CV)技术
- ES索引原理