【计算机图形学】《五讲速通CG重点》第二讲-Viewing
?如果这篇文章对你有帮助,欢迎点赞与收藏~
目录
3.2 Cohen-Sutherland Algorithm
3.4 Sutherland-Hodgman Polygon Clipping
3 BSP Tree (Binary space partitioning)
2D_3D_transformation
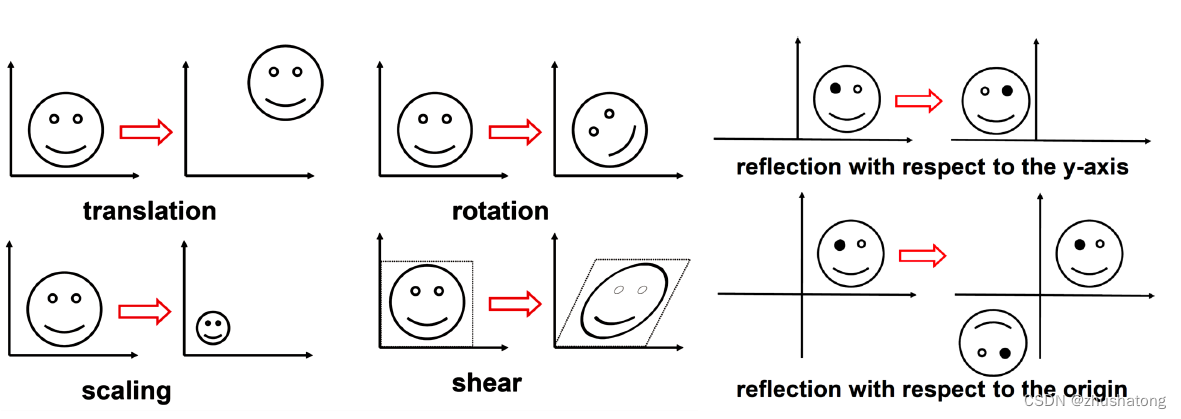
线性:Rotation, scale, shear, reflection are all linear but translation is not linear.
可交换:Only the same kinds of transformation are commutative.
1 Homogeneous coordinate 齐次坐标
Point refers that the last coordinate is 1
Vector refers that the last coordinate is 0
--> point - point = vector
2 Affine transformation 仿射变换
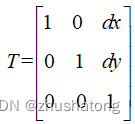
translation together with linear transformations
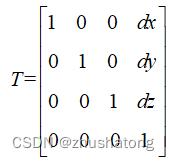
Translation: Move dx, dy
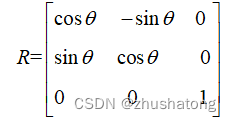
Rotation(counterclockwise)
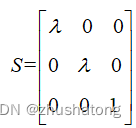
Scale
Rigid-motion: translation+rotation
3 Composite transformations
Rotate about a particular point : translate to the origin | rotate | translate back
Transformation of local coordinate systems---> obtain the coordinate in world space (以原先local coordinate原点为原点的世界系)
𝑝𝑛 is the world coordinate of point p after n transformations![]()
4 3D transformations
Translation
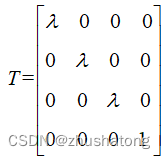
Scale
空间中的三维旋转(欧拉角的矩阵)四元数
2D_3D_viewing
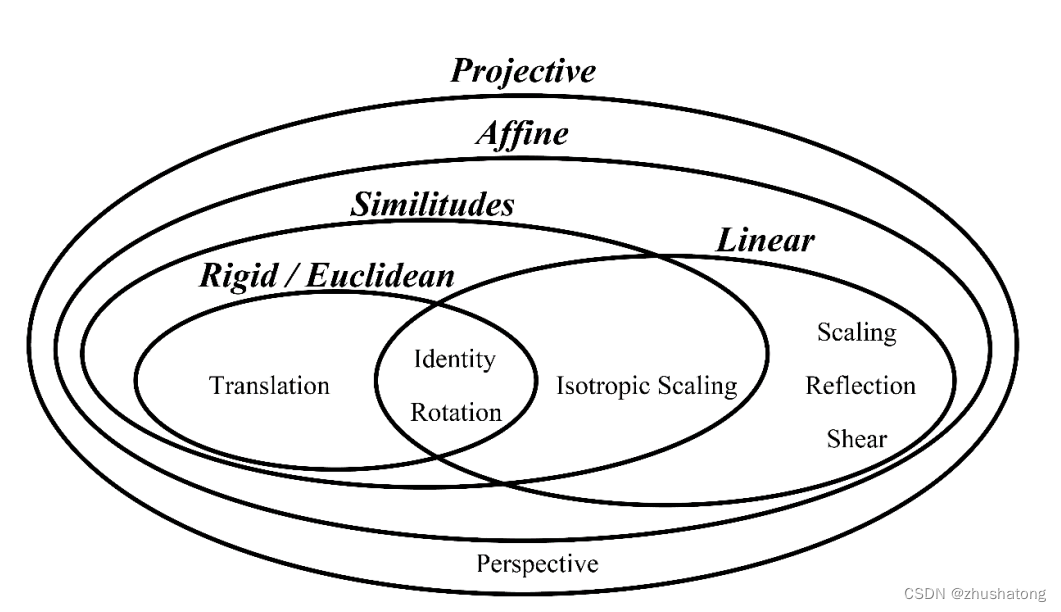
内侧的椭圆是“Affine”(仿射),仿射变换是射影变换的一个子集,它保持了图形的平行性。仿射变换包括了“Similaritudes”(相似)和“Linear”(线性)变换。
“Similaritudes”椭圆进一步细分为“Rigid / Euclidean”(刚体或欧几里得)变换,这种变换包含了平移(Translation)、旋转(Rotation)和恒等(Identity)。这些变换保持了图形的形状和大小不变。
在“Linear”变换的范围内,有“Scaling”(缩放),“Reflection”(反射),“Shear”(剪切),以及“Isotropic Scaling”(等距缩放)。这些变换可以改变图形的大小,但可能会改变其形状。
“Perspective”(透视)在图的底部被提及,它通常关联于射影变换,但在这个图中没有被包含在任何椭圆内,这可能意味着它作为一个独立概念存在,涉及从特定视点观察物体时的变换。
The camera is located at origin and point in the -z direction.
1 The process of viewing
Transform into camera coordinate
-> perform projection into view volume (orthogonal transformation/perspective transformation)
-> clip geometry outside the clipping volume
-> project into screen coordinate(perspective division & viewport NDC)
-> remove hidden surface
Model view matrix:
If we want to visualize objects with both positive and negative z values, we can move the camera in the positive z direction/ move the objects in the negative z direction.
2 Projection transformation
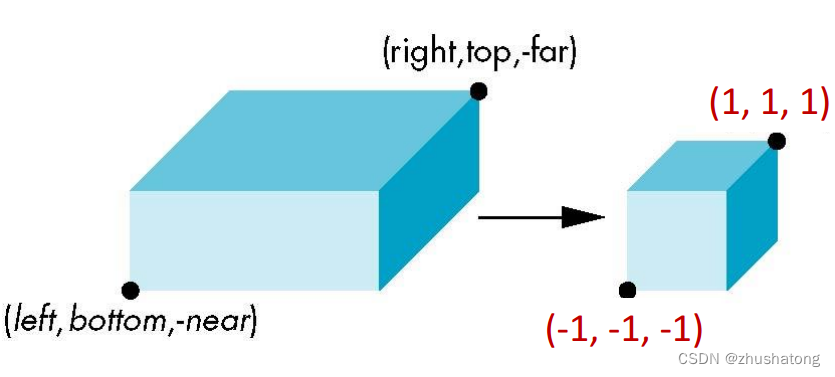
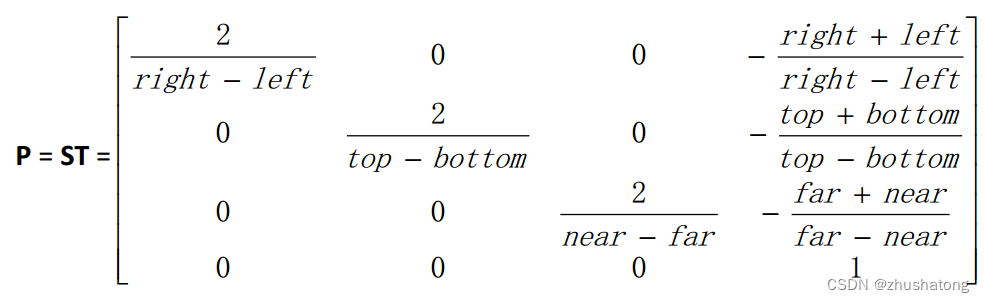
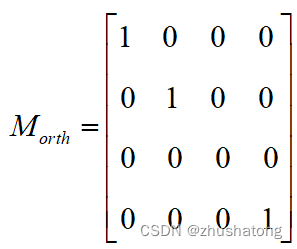
2.1 Orthogonal projection
-
Translation center to origin
T( -(left+right)/2 , -(bottom+top)/2 , (near+far)/2 )
-
Scale to have sides of length 2
S ( 2/(right-left) , 2/(top-bottom) , 2/(-far-(-near)) )
 Pay attention to left, right, bottom, top, -near, -far (the positive direction of z is outside the screen)
Pay attention to left, right, bottom, top, -near, -far (the positive direction of z is outside the screen)
Final projection
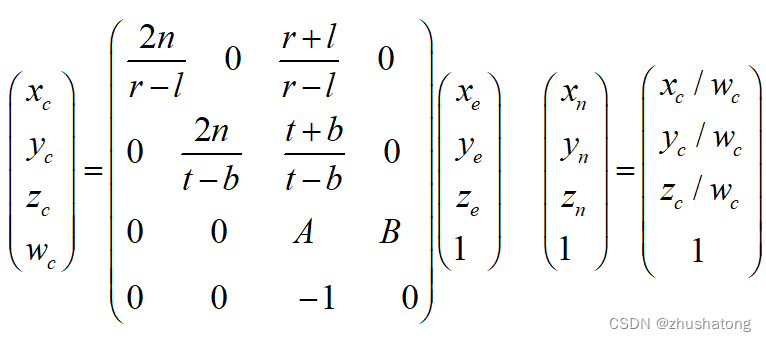
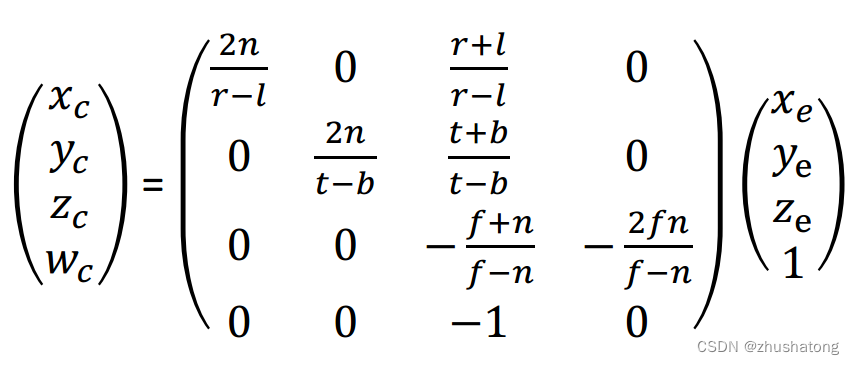
2.2 Perspective projection
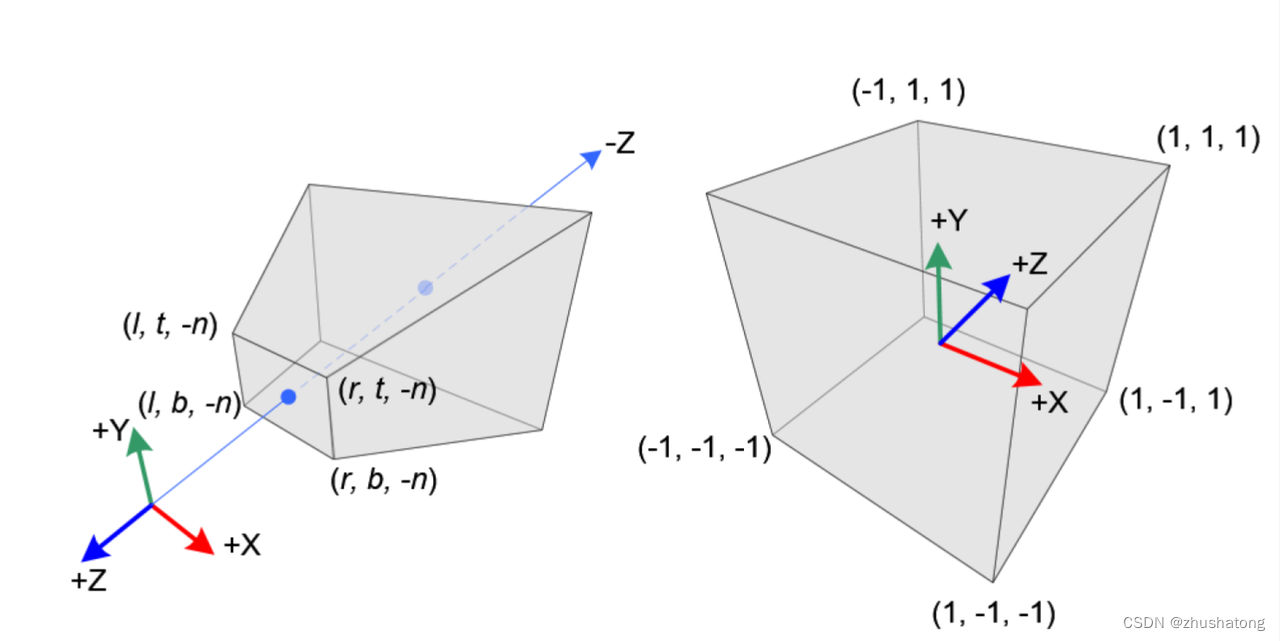
Given the (xe,ye,ze) is coordinate in eye space. The coordinate of projection :
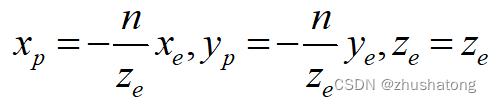
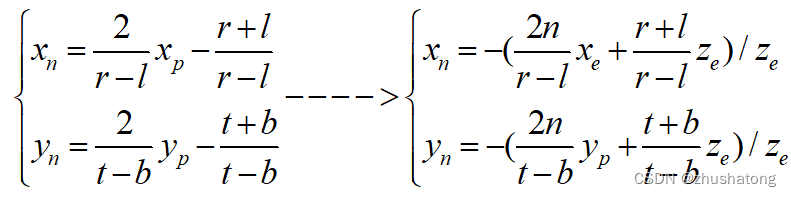
Then do the operation like orthogonal projection:
Translate and scale: n means normalize / c means clipping

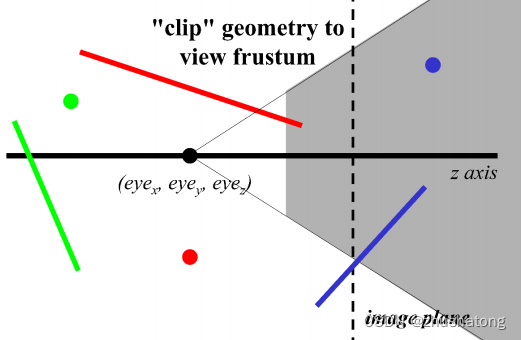
3 Clipping
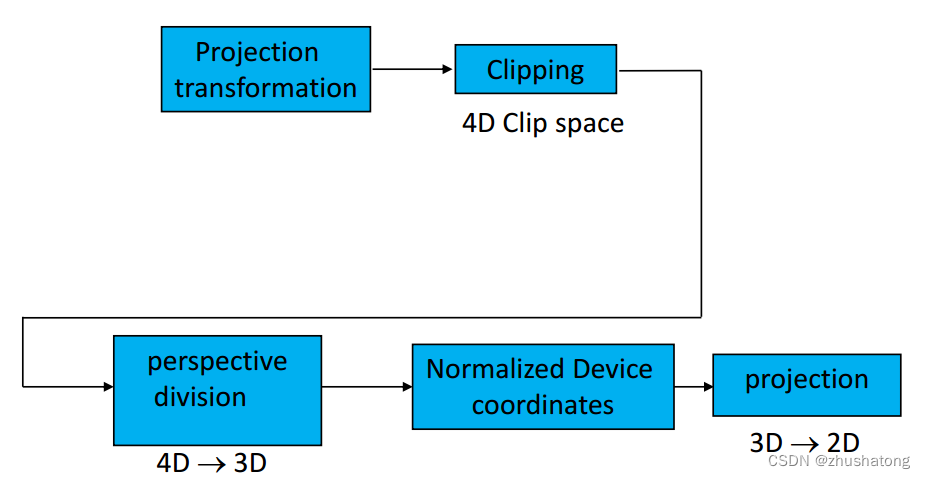
Perspective division could cause what should be clipped in clipping volume projected into NDC?
3.1 Why?
Avoid division by 0 && don’t draw things behind the eye
Don’t waste time on objects outside the boundary.
3.2 Cohen-Sutherland Algorithm
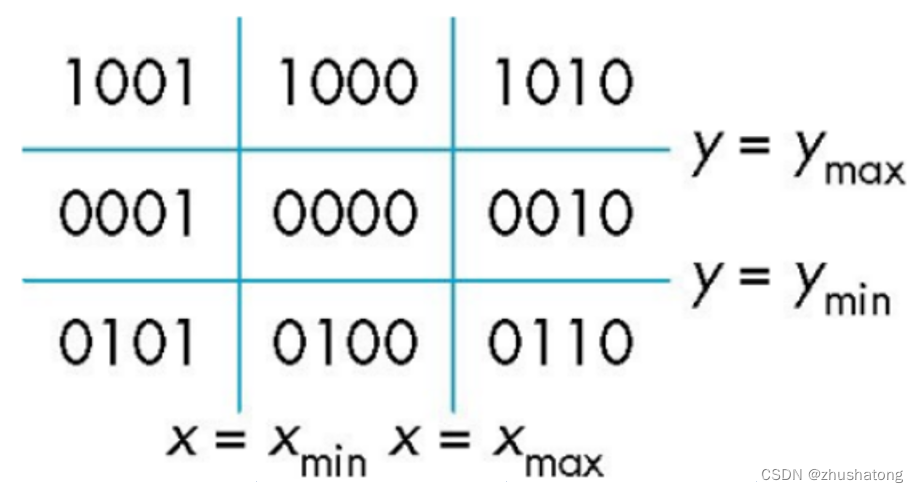
The bit means up, down, right, left from left to right respectively.
If the code of two endpoints is all 0000, it means the segment is in clipping window.
If the result of intersecting the code of two endpoint concludes 1, it means the segment is out of clipping window.
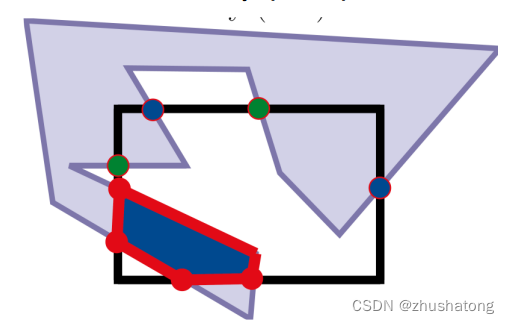
3.3 Weiler-Atherton Clipping
多边形序列
裁剪窗口序列 逆时针进行排序
当在多边形序列 or 裁剪窗口序列 遍历到一个intersection时,转换到另一个序列继续遍历,若发现某点已经遍历,即绘制多边形。
当出现回路时,回退到最后一个existing intersection
其中entering intersection为进入点,existing intersection 为退出点
当多边形序列遍历完毕后,算法结束
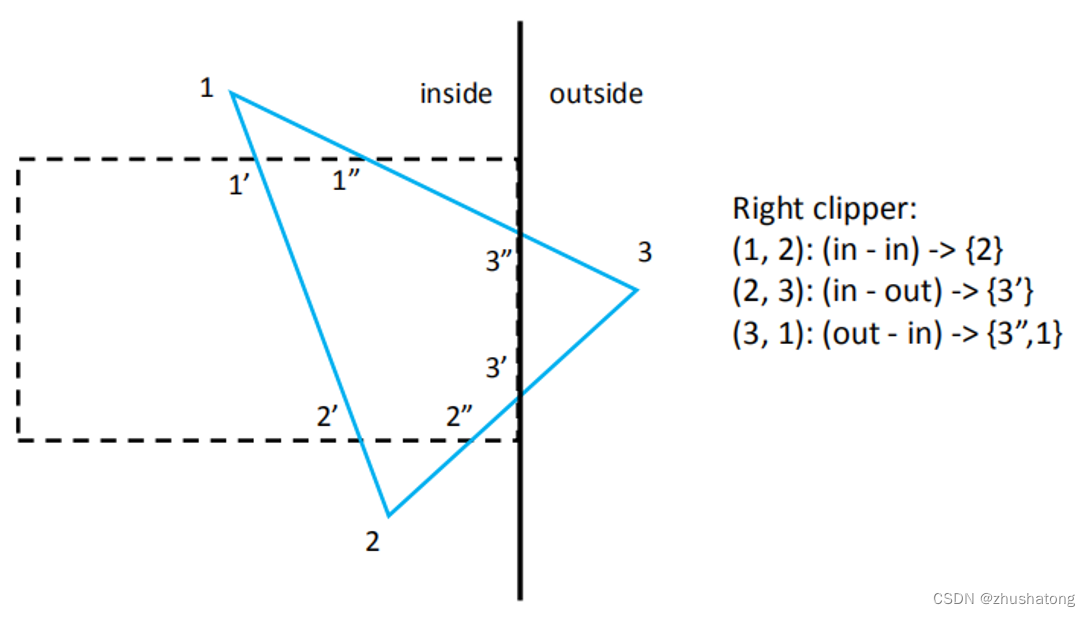
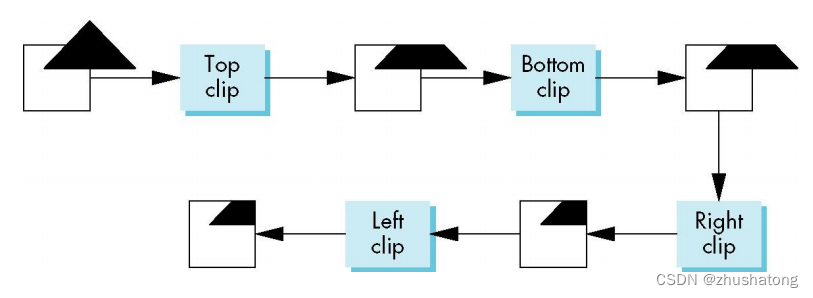
3.4 Sutherland-Hodgman Polygon Clipping
(in,in) / (in,out) / (out,in)
只要左边是in,一定输出一个点,且输出的点一定与右边数字有关,
Out,in 一定输出两个点,
Out out 输出None
Visible surface detection
Visibility of primitives:
primitive lies outside the field of the clipping volume
Primitive is back-facing
Primitive is occluded by one or more objects nearer the viewer
Visible surface algorithms
Object space technique:
applied before vertices are mapped to pixels
Back face culling , painter’s algorithm, BSP tree
Image space technique:
applied while the vertices are rasterized
Z Buffer
1 Back face culling
Face is visible iff θ∈[-90,90] culling faces --- should be hidden
Equivalently cos >= 0 or v ? n >= 0
2 Painter’s Algorithm
Render polygons a back to front order so that polygons behind others are simply painted over
3 BSP Tree (Binary space partitioning)
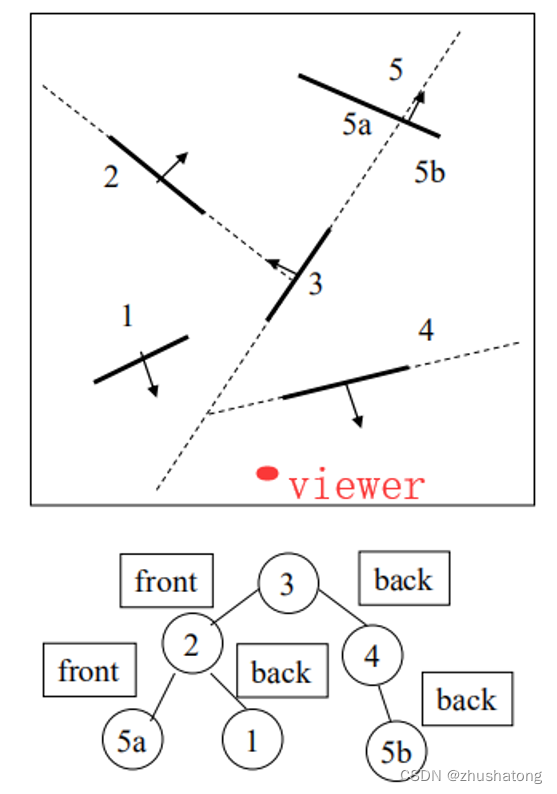
Traverse the tree, remember that we should paint the point according to the distance sort.
5a, 2, 1, 3, 5b, 4
4 Z-buffer complexity (n*m*k)
Rasterize every input polygon
Track depth values of closest polygon so far
Paint the pixel with the color of the polygon whose z value is the closest to the eye.
Advantage
? Simple to implement in hardware.
? Memory for z-buffer is now not expensive
? Diversity of primitives – not just polygons.
? Unlimited scene complexity
? Don’t need to calculate object-object intersections.
Disadvantage
? Extra memory and bandwidth
? Waste time drawing hidden objects
Z-precision errors
? May have to use point sampling
Frame buffer to save color information, depth buffer to save minimal depth information
When time to update the color, check whether current depth is less than saved depth.
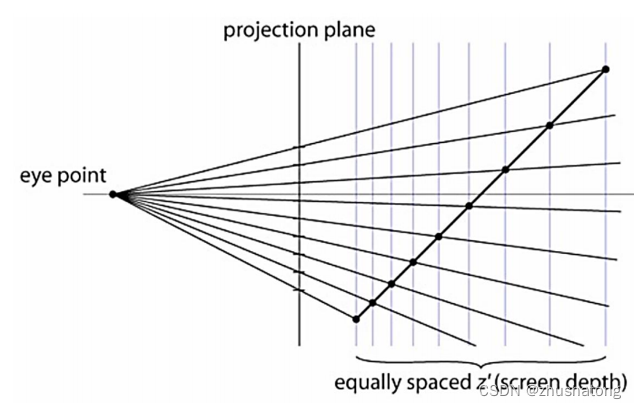
Z-buffer precision:(fighting)
Caused by the perspective division z/w when the interval is so small even come down to float-point precision.
push the zNear clipping plane out and pull the zFar plane in as much as possible
When far from projection plane, the resolution(分辨率) will enlarge, causing two closer primitive located in the same interval.
?如果这篇文章对你有帮助,欢迎点赞与收藏~
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 基于遗传算法的微电网优化调度
- Spring IOC之ImportSelector接口
- 2024第6届中国(山东)国际智慧养老产业展览会
- 【INTEL(ALTERA)】错误 (22507) 设备初始化时钟 INIT_INTOSC 不支持活动串行时钟 AS_FREQ_100MHZ
- 企业微信SCRM:重塑客户关系管理的利器
- H5移动端使用html2canvas点击按钮生成图片并下载
- 【面试突击】硬件级别可见性问题面试实战(下:synchronized和volatile底层对原子性、可见性、有序性的保证)
- 您的项目应该选用哪一种编程语言?深入对比PHP与Python
- 7 个 Java中的 棘手问题
- 向爬虫而生---Redis 拓宽篇4 <redis持久化 --- RDB章>