高级分布式系统-第13讲 分布式控制经典理论
发布时间:2024年01月15日
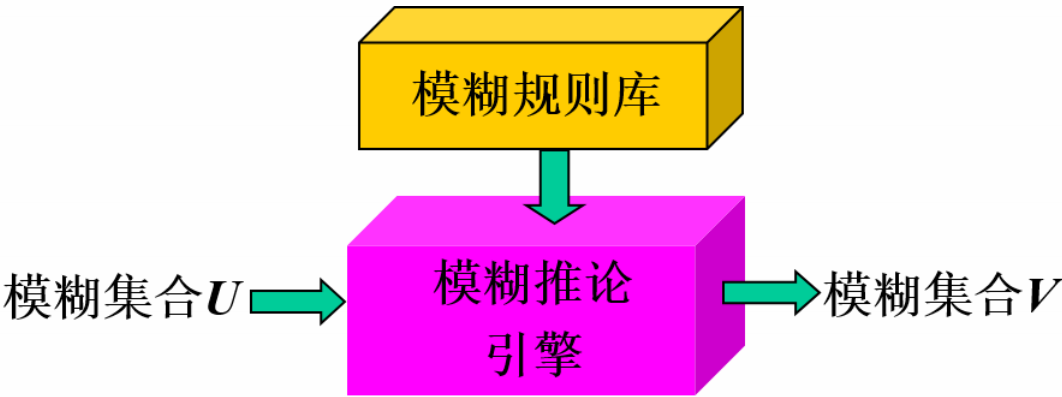
模糊控制器
模糊控制是以模糊集理论、模糊语言变量和模糊逻辑推理为基础的一种智能控制方法,它是从行为上模仿人的模糊推理和决策过程的一种智能控制方法。
该方法首先将操作人员或专家经验编成模糊规则,然后将来自传感器的实时信号模糊化,将模糊化后的信号作为模糊规则的输入,完成模糊推理,将推理后得到的输出量反模糊化之后加到执行器上。



模糊控制的起源
(1)1965年 加利福尼亚大学教授 L.A Zadeh 发表论文《模糊集合论》用以解决真实世界中普遍存在的模糊现象,是用一种数学模型来描述语意式的模糊信息的方法。
(2)1974年 英国工程师 E.H.Mamdani 将模糊集合理论应用于锅炉和蒸汽机的控制,获得成功,模糊数学走向应用,取名模糊控制。
模糊控制的三大发展阶段
(一)基本模糊控制
需要针对特定控制对象设计特定的控制律,因此控制效果好。在控制过程中规
则不变,不具有通用性,设计工作量大。
(二)组织模糊控制
某些规则和参数可修改,可对一类对象进行控制。
(三)智能模糊控制
具有人工智能的特点,能对原始规则进行修正、完善和扩展,通用性强。
模糊集合
模糊集合概述
传统确定性集合与模糊集合之比较

模糊集合的特点
(1) 不是0或1的表示方式,而是程度上“多”或“少”的差别。
(2) 传统的明确集合是属于二元的,论域中的元素对某一集合的关系只有两种,也就是 “属于” 与 “不属于”。
(3) 模糊集合是利用隶属度函数(membership function)的大小做为主要的决策机制 。
模糊集合的定义


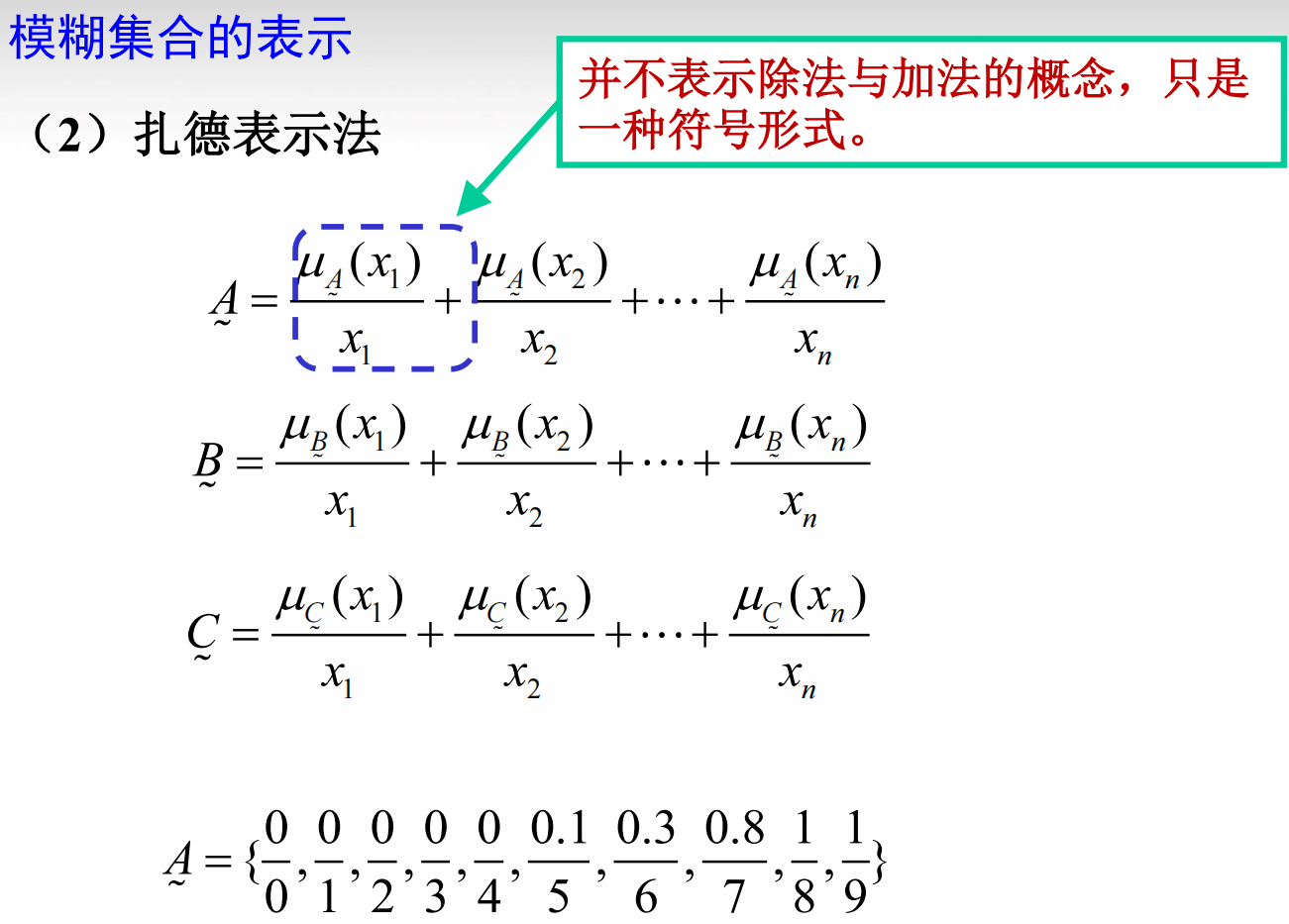
模糊集合的表示


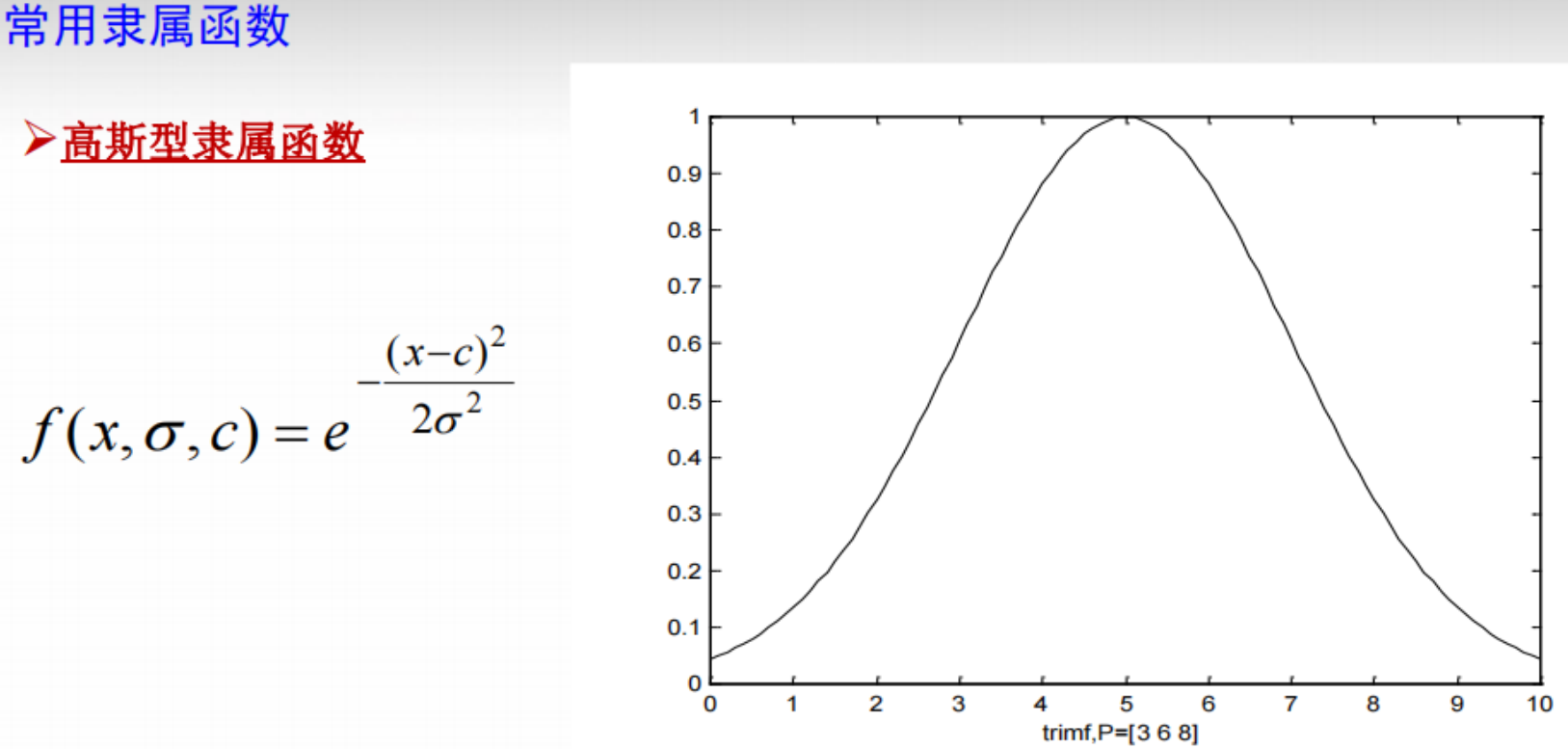
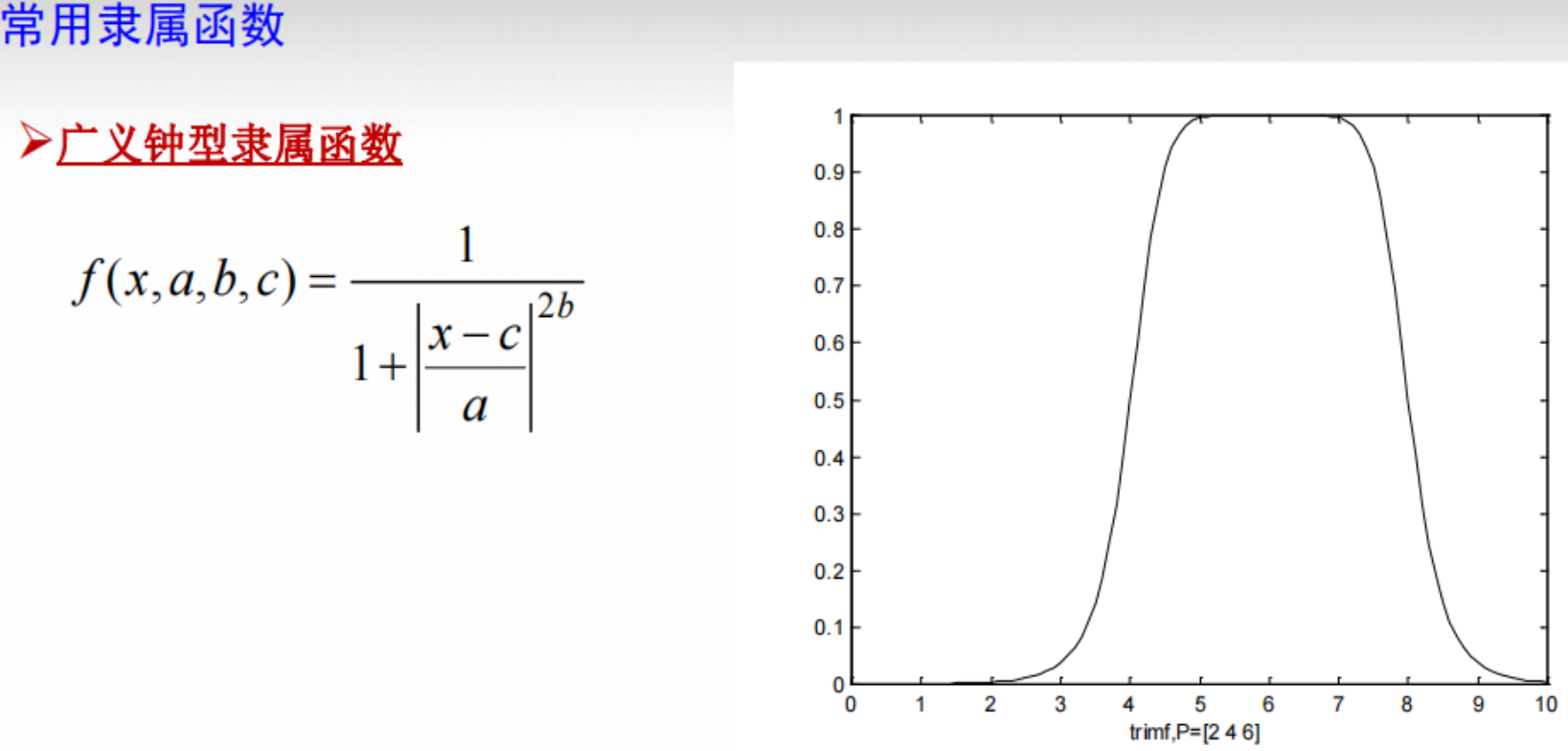
常用隶属函数




模糊集合的运算

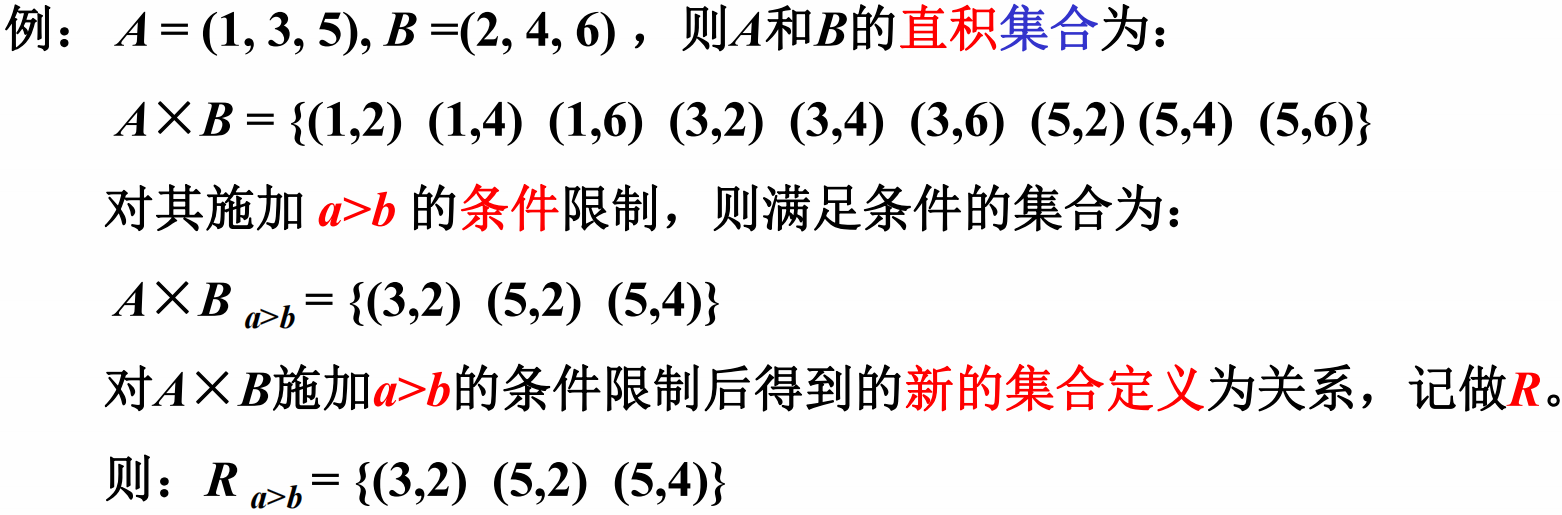
关系与模糊关系(什么是关系)
关系是指对两个普通集合的直积施加某种条件限制后得到的序偶集合。常用R表示。
关系与模糊关系(关系的表示)



模糊关系矩阵的合成


解释:对于矩阵AoB
拓展资料数学模型学习——模糊关系与模糊矩阵_模糊关系矩阵-CSDN博客
模糊集合的直积


推理知识
假言推理

模糊假言推理

文章来源:https://blog.csdn.net/weixin_50917576/article/details/135597413
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【PyTorch】PyTorch之Random模块
- Python实现JS逆向解密采集网站数据
- 前端发送请求之参数处理---multipart/form-data与application/x-www-form-urlencoded
- 缓冲字符流
- 【MySQL复合查询】
- redis过期策略
- 三.Linux无名管道(PIPE)和有名管道(FIFO)的区别
- TCP连接数据包解析
- pyDAL一个python的ORM(终) pyDAL的一些性能优化
- OSG中几何体的绘制(二)