2.3_6 用信号量实现进程互斥、同步、前驱关系
发布时间:2024年01月07日
2.3_6 用信号量实现进程互斥、同步、前驱关系
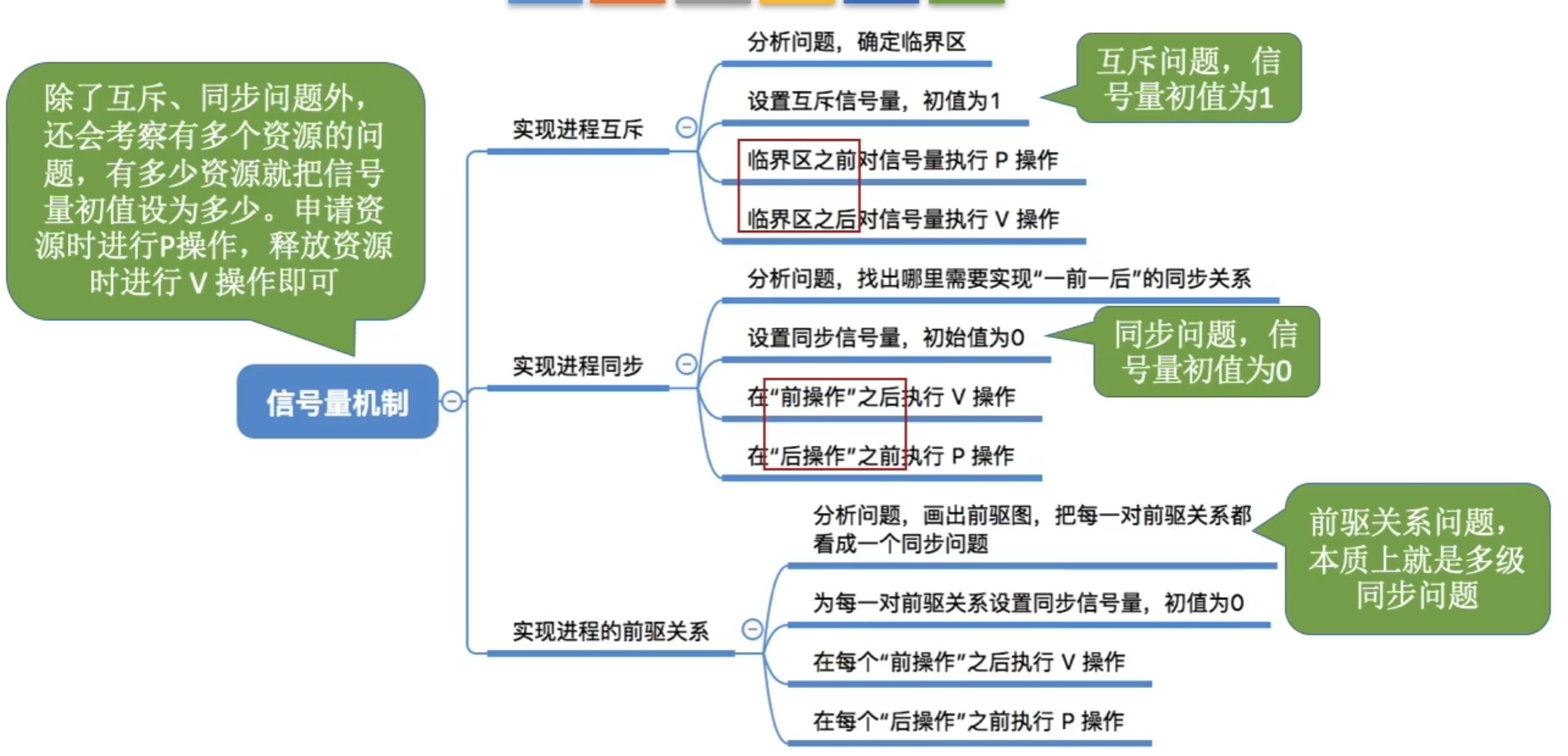
1.信号量机制实现进程互斥
- 分析并发进程的关键活动,划定临界区(如:对临界资源打印机的访问就应放在临界区)
- 设置互斥信号量mutex,初值为1
- 在进入区P(mutex) – 申请资源
- 在退出区V(mutex) – 释放资源
/*信号量机制实现互斥*/
P1(){
...
P(mutex); //使用临界资源前需要加锁
临界区代码...
V(mutex); //使用临界资源后需要解锁
...
}
P2(){
...
P(mutex);
临界区代码...
V(mutex);
...
}
2.信号量机制实现进程同步
进程同步:要让各并发进程按要求有序地推进
P1(){
代码1;
代码2;
代码3;
}
P2(){
代码4;
代码5;
代码6;
}
比如,P1、P2并发执行,由于存在异步性,因此二者交替推进的次序是不确定的。
若P2的“代码4”要基于P1的“代码1”和“代码2”的运行结果才能执行,那么我们就必须保证“代码4”一定是在“代码2”之后才会执行。
这就是进程同步问题,让本来异步并发的进程互相配合,有序推进。
用信号量实现进程同步:
- 分析什么地方需要实现“同步关系”,即必须保证“一前一后”执行的两个操作(或两句代码)
- 设置同步信号量S,初始为0
- 在“前操作”之后执行V(S)
- 在“后操作”之前执行P(S)
/*信号量机制实现同步*/
semaphore S=0; //初始化同步信号量,初始值为0
P1(){
代码1;
代码2;
V(S);
代码3;
}
P2(){
P(S);
代码4;
代码5;
代码6;
}
以上代码保证了代码4一定在代码2之后执行
若先执行到V(S)操作,则S++后S=1。之后当执行到P(S)操作时,由于S=1,表示有可用资源,会执行S – ,S的值变回0,P2进程不会执行block原语,而是继续往下执行代码4。
若先执行到P(S)操作,由于S=0,S-- 后S =-1,表示此时没有可用资源,因此P操作中会执行block原语,主动请求阻塞。之后当执行完代码2,继而执行V(S)操作,S++,使S变回0,由于此时有进程在该信号量对应的阻塞队列中,因此会在V操作中执行wakeup原语,唤醒P2进程。这样P2就可以继续
3.信号量机制实现前驱关系
进程P1中有句代码S1,P2中有句代码S2,P3中有句代码S3 …… P6中有句代码S6。这些代码要求按如下前驱图所示的顺序来执行:
其实每一对前驱关系都是一个进程同步问题(需要保证一前一后的操作)
因此,
- 要为每一对前驱关系各设置一个同步信号量
- 在“前操作”之后对相应的同步信号量执行V操作
- 在“后操作”之前对相应的同步信号量执行P操作

知识回顾与重要考点
文章来源:https://blog.csdn.net/m0_66839257/article/details/135435126
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- PaddleOCR环境搭建
- 计算机毕业设计----SSH实现简单在线听音乐收藏管理系统
- nodejs -- fs 模块
- VLAN原理与配置
- Keil报错解决1:After Build - User command
- CNN实现对手写字体的迭代
- 神经网络框架的基本设计
- 1089 喜羊羊运动会——m位数问题
- 普冉(PUYA)单片机开发笔记(11): I2C通信-配置主从收发
- 龘龘龙年,抓春季招商机遇,参加4月2024北京健康展会就够了