无人机支持的空中无蜂窝大规模MIMO系统中上行链路分布式检测
发布时间:2023年12月21日
无人机支持的空中无蜂窝大规模MIMO系统中上行链路分布式检测
无人机支持的空中无蜂窝大规模MIMO系统中上行链路分布式检测
介绍题目
在无人机(UAV)支持的空中无蜂窝大规模多输入多输出(mMIMO)系统中,上行链路分布式检测涉及以下几个关键概念和步骤:
- “无蜂窝”意味着系统不是围绕传统的蜂窝结构组织的,而是通过分散的多个基站协作提供覆盖和容量,而不是单个固定的基站。
- “上行链路”(Uplink)指的是从用户设备到无人机基站的通信链路。
- “分布式检测”意味着信号处理不是在单个中心点完成,而是在多个无人机节点上独立完成,每个节点处理其接收到的信号。
一. 背景(解决的问题)
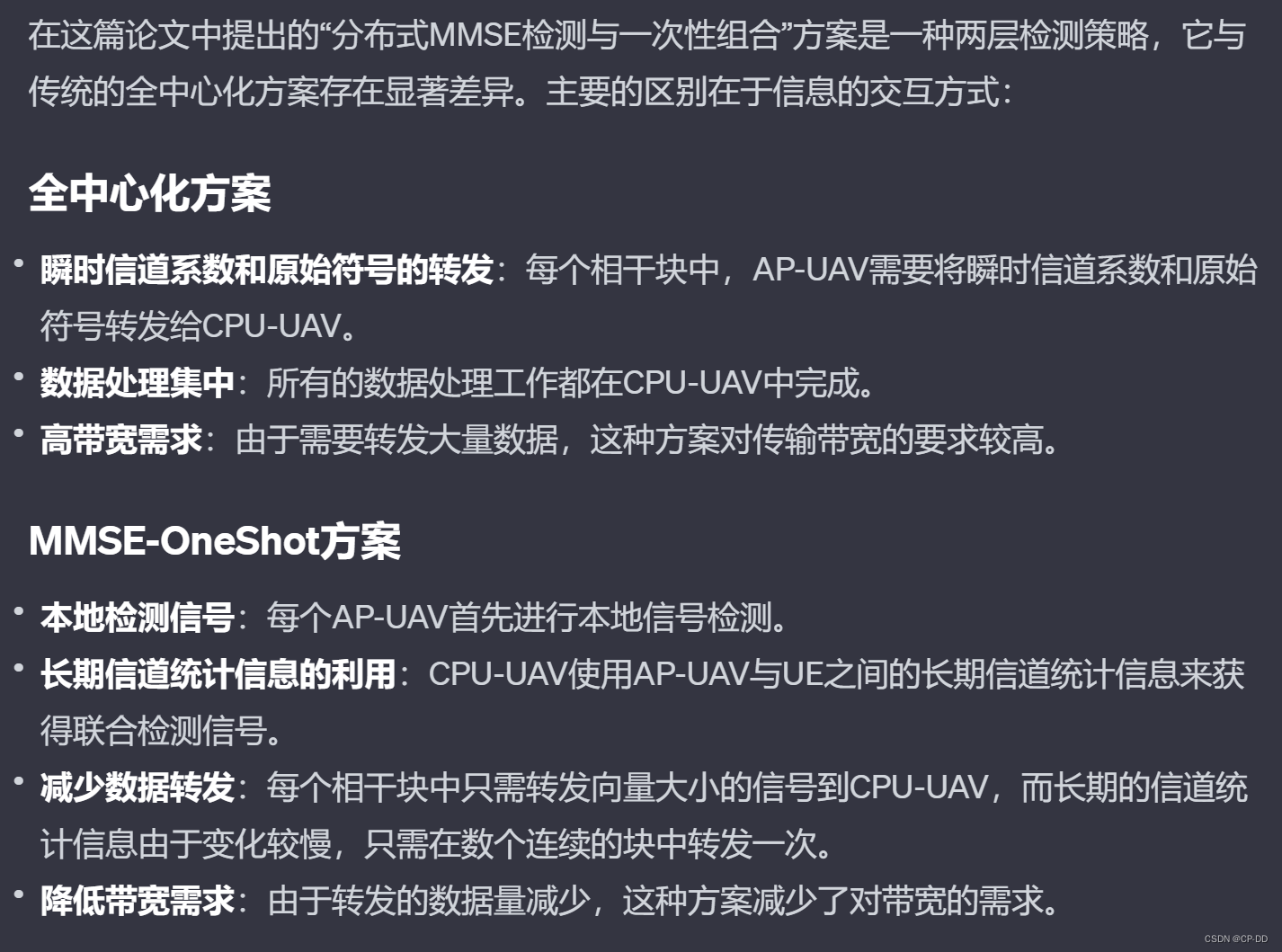
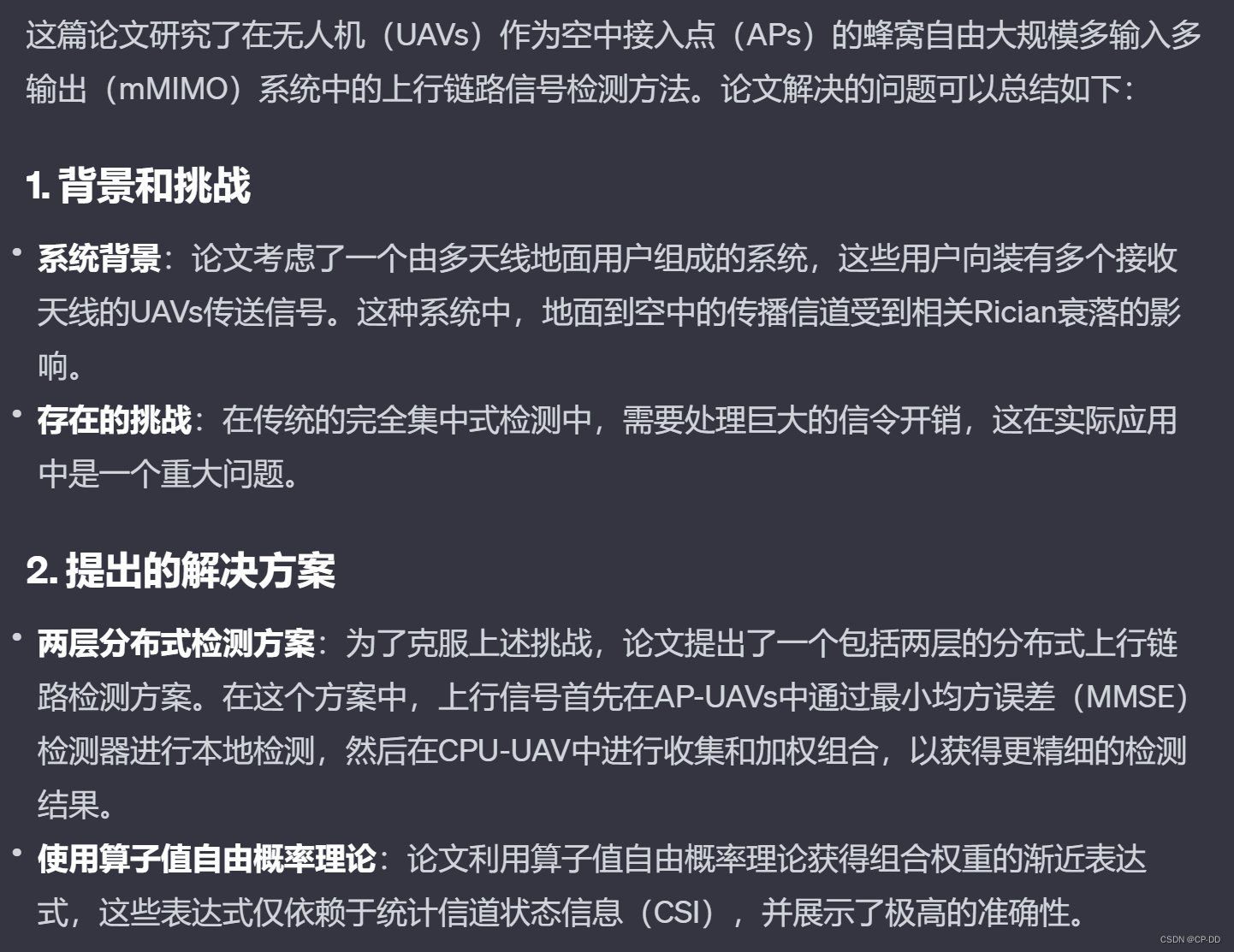
- 在全集中式的信号检测方案中,需要将所有接收到的原始符号集中在中央处理单元(CPU-UAV)进行处理,无人机基站和中央处理单元之间需要交换大量的信道状态信息和原始数据,这在无线前传链路容量有限的情况下,会导致显著的交互开销和不可预测的延迟。
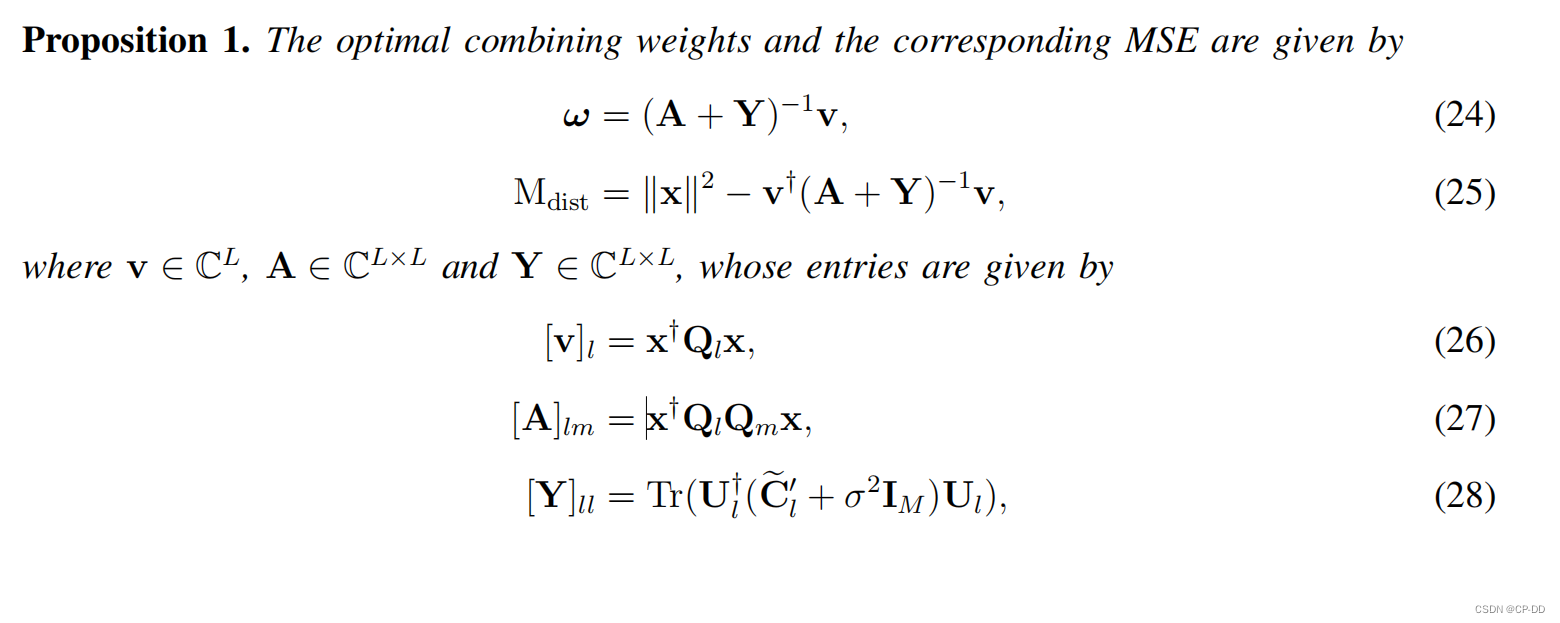
- 为了减轻无人机基站(AP-UAVs)与中央处理单元(CPU-UAV)之间的交互负担,论文提出了一种两层分布式上行信号检测方案。在此方案中,上行信号首先在AP-UAVs中通过局部最小均方误差(MMSE)检测器进行恢复,然后将处理过的信号转发到CPU-UAV,由CPU-UAV进行加权组合以获得更精细的信号。
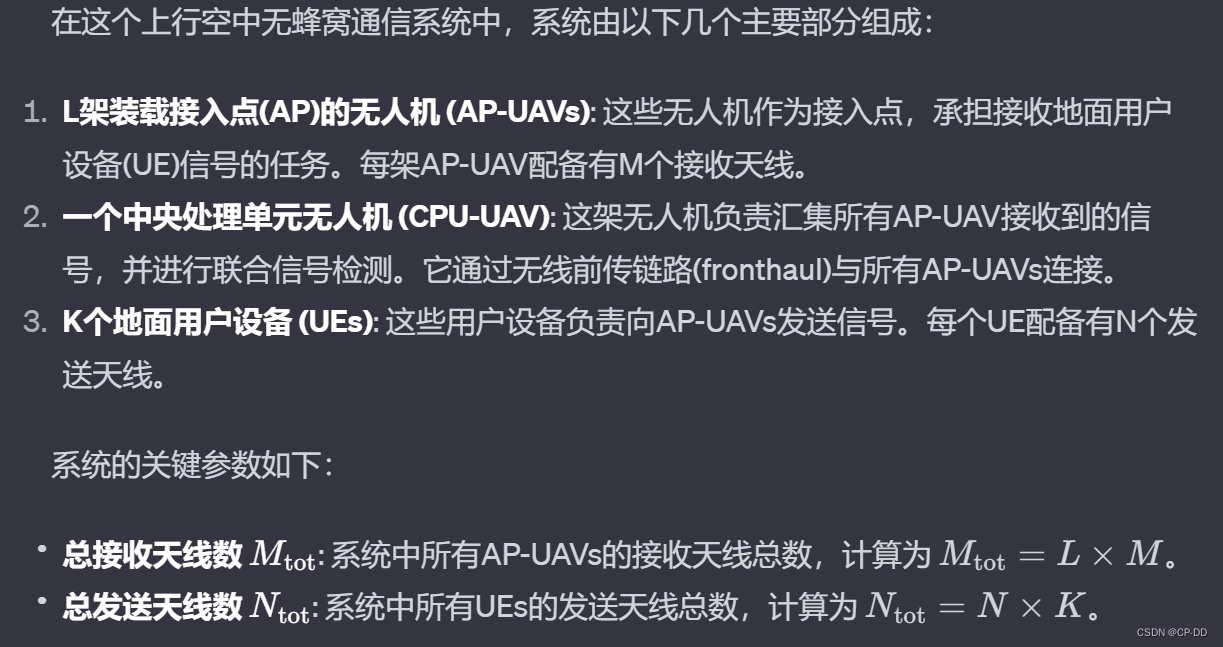
二. 系统模型
信道模型
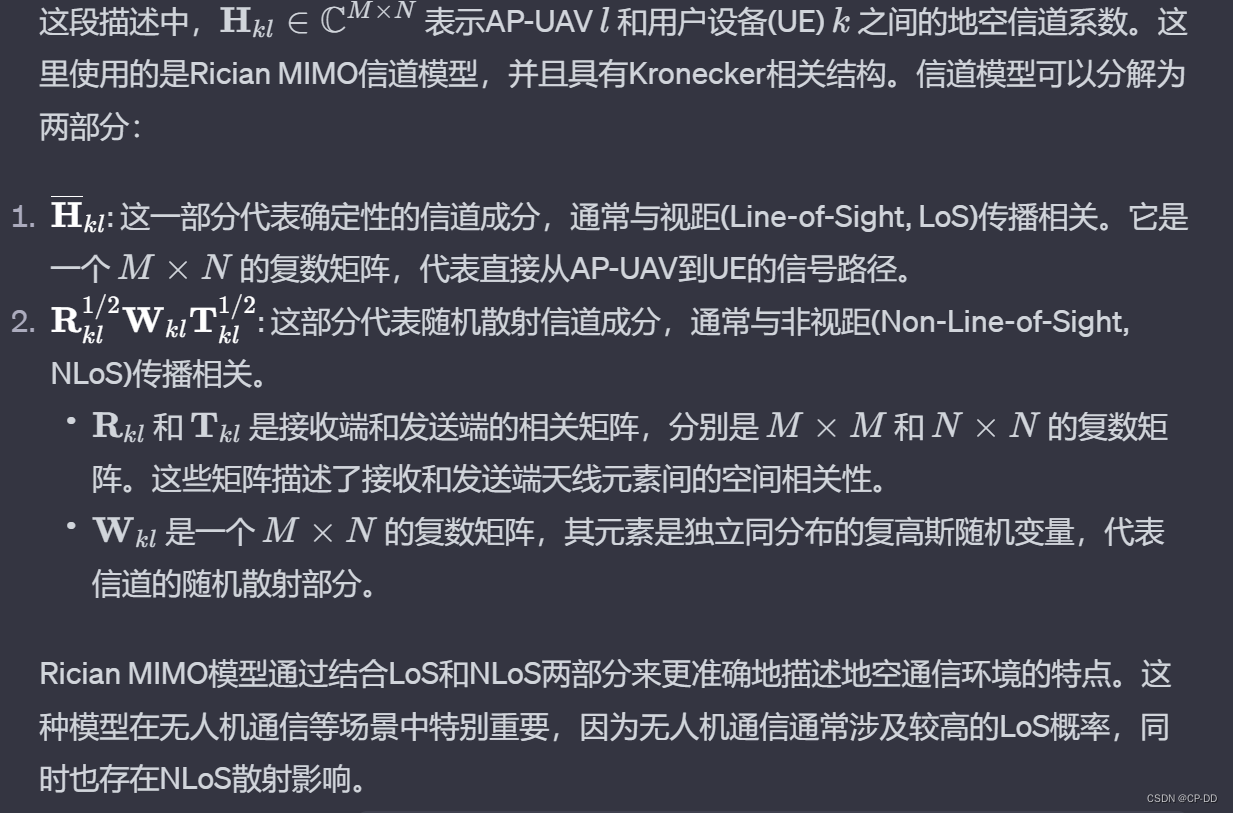
信道系数

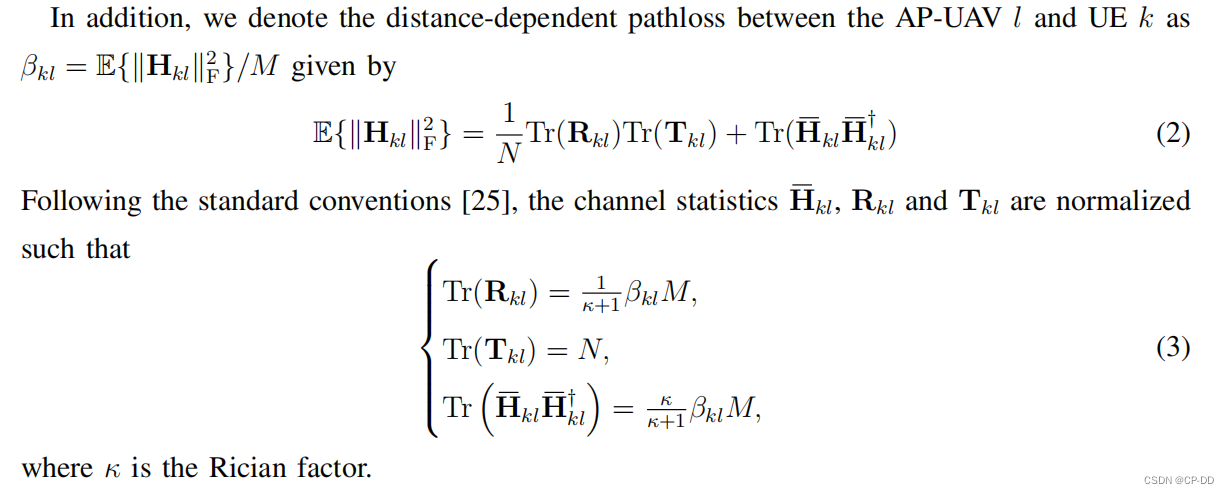
进行标准化
信道估计 和 数据传输
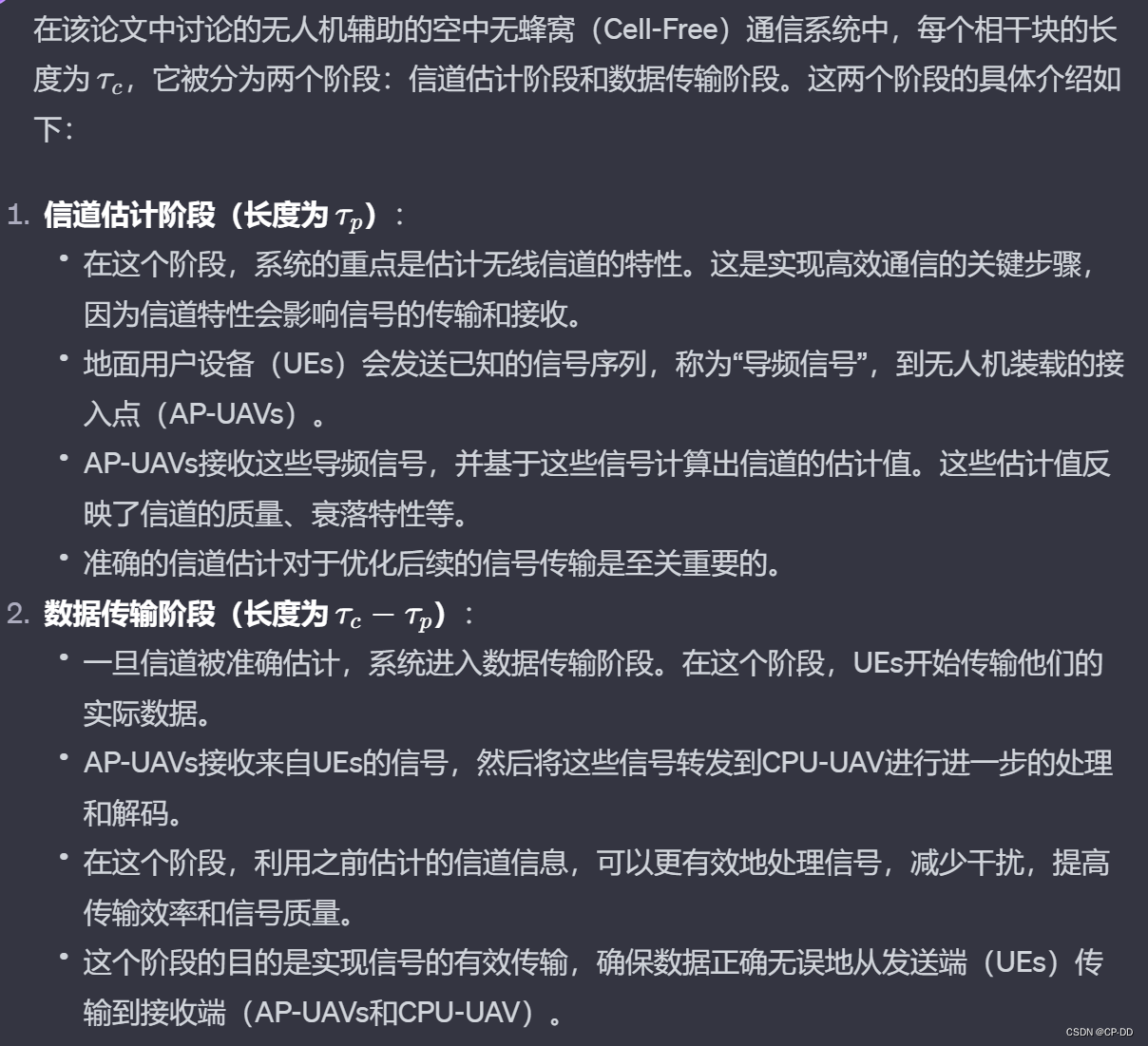
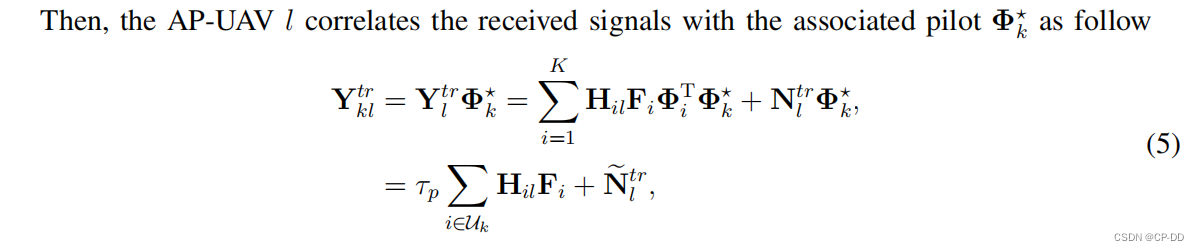
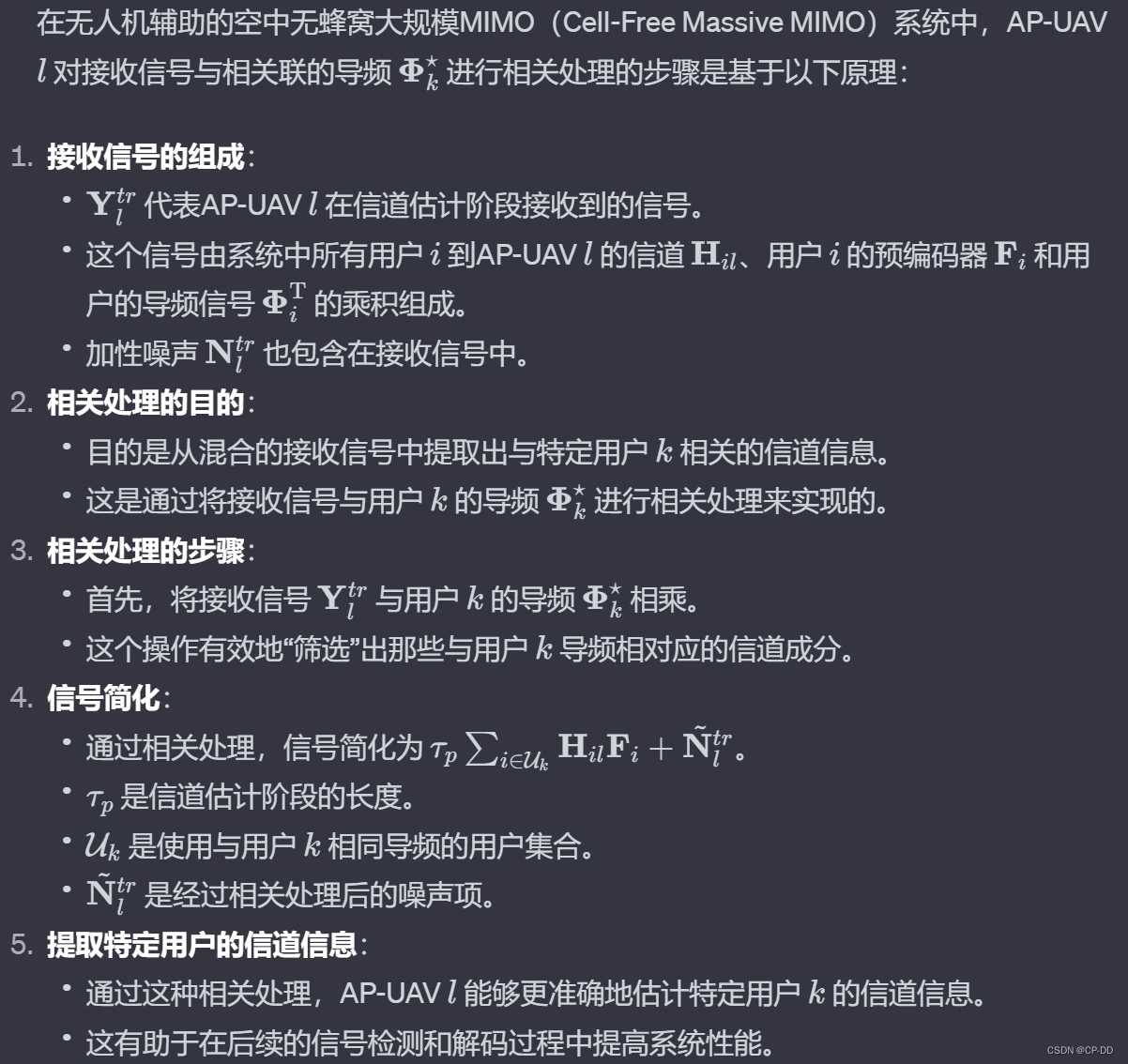
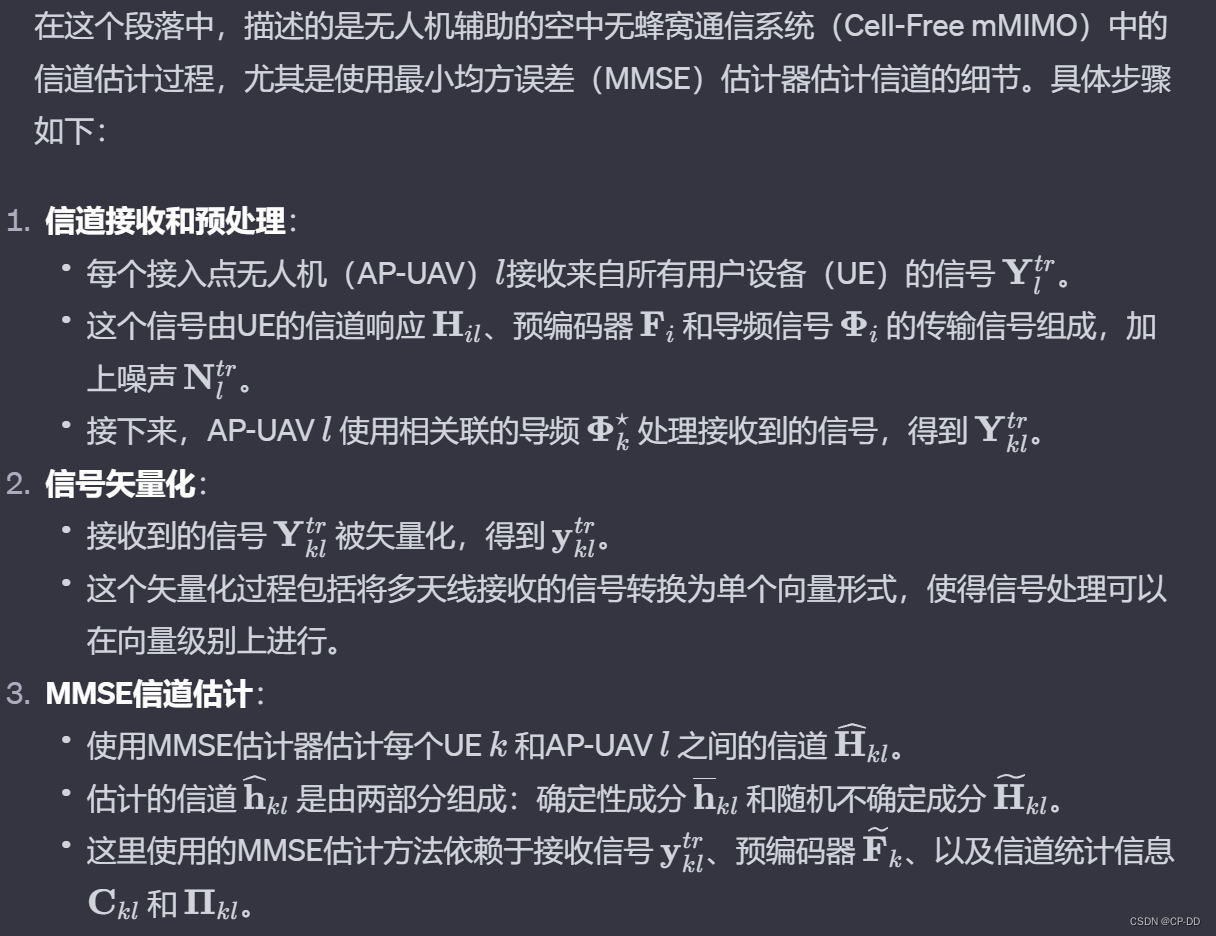
信道估计

- 在信道估计阶段接收到的信号。

- 从混合的接收信号中提取出与特定用户 k 相关的信道信息
- 利用MMSE估计器准确估计每个用户到每个AP-UAV的信道。L无人机 K 是用户

上行数据传输
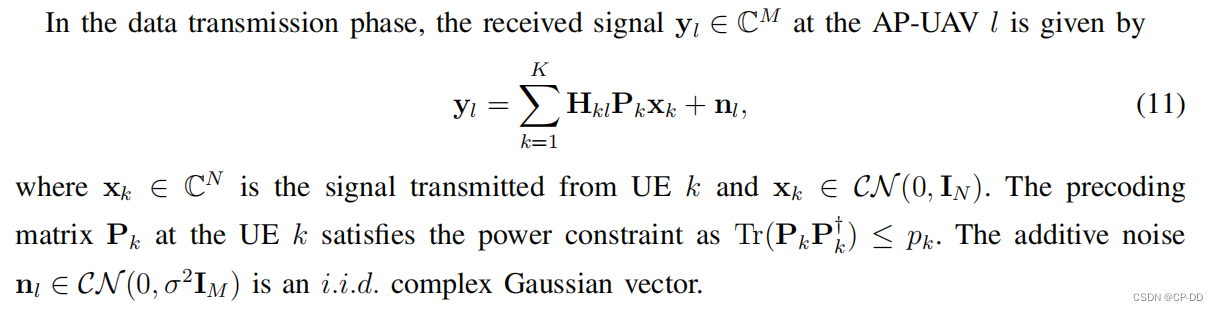
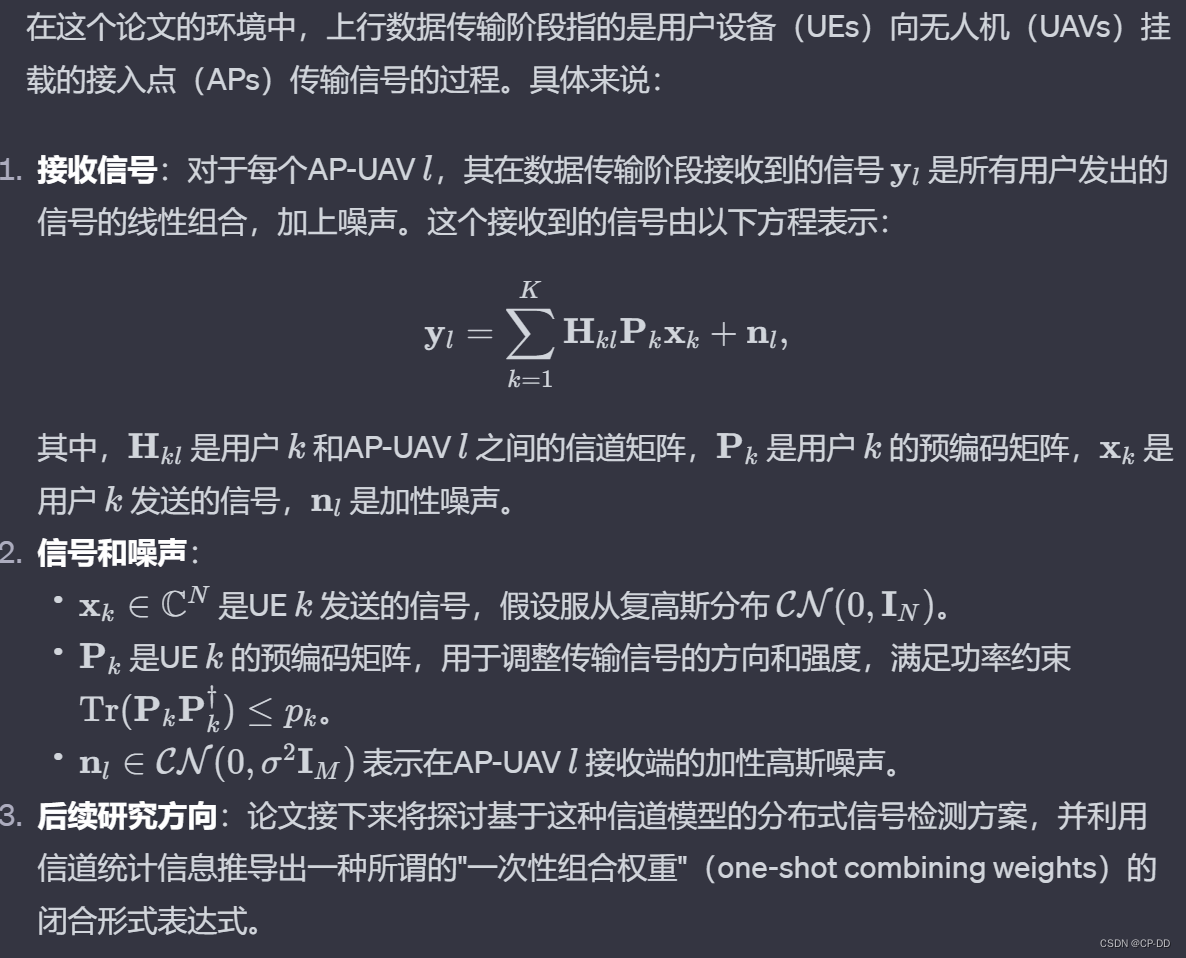
三. 具体的流程
第一层

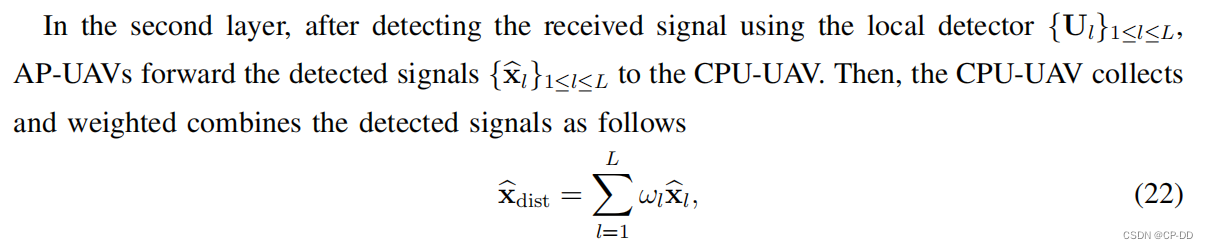
第二层

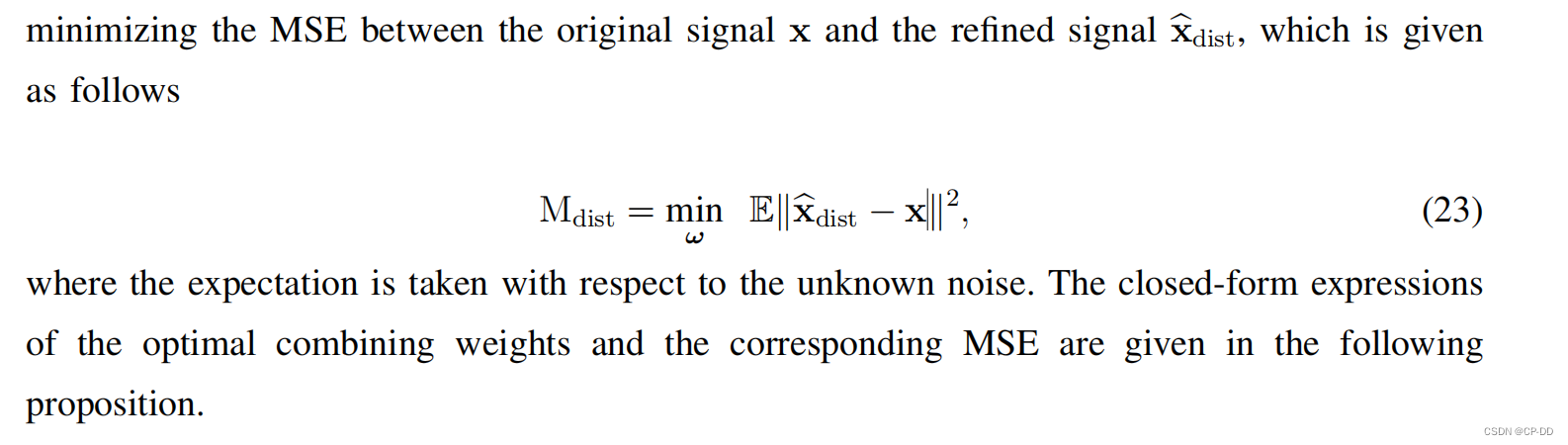
最优组合权重的表达式
四. 用到的知识
在信道模型中,矩阵分析的知识点被广泛应用于描述和处理信道系数、相关性和路径损耗等概念。具体来说,信道模型中使用的矩阵分析知识点包括:
-
共轭转置:
-
矩阵二范数:

-
矩阵乘法:
-
矩阵转置:
-
矩阵求逆:
-
矩阵的迹(Trace):
-
向量的二范数(也称为欧几里得范数)的平方

-
Kronecker乘积:
文章来源:https://blog.csdn.net/weixin_50993868/article/details/135114249
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- html table+css实现可编辑表格
- 全国首创:福建协和医院成功完成长期型人工心脏微创植入
- [C#]C# OpenVINO部署yolov8实例分割模型
- 力扣精选算法100题——长度最小的子数组(滑动窗口专题)
- 【Antlr】Antlr 解析 DOT 格式
- Python爬虫完整代码拿走不谢_python爬虫代码
- 【漏洞复现】锐捷EG易网关login.php命令注入漏洞
- 从零学算法328
- 大数据时代必备技能!Shell脚本学习网站助你一臂之力!
- Go语言的单元测试与基准测试详解