移动机器人规划 - 基于采样的路径搜索
0 预备知识
基于采样的规划器:
(1)不要试图显示地构造C空间及其边界
(2)只需要简单的机器人配置是否发生碰撞
(3)利用简单的碰撞测试,充分了解空间
(4)碰撞检测是一个单独的模块-可根据应用进行定制
(5)随着碰撞检测的改进,这些算法也在改进
(6)单点查询和多点查询的请求方法不同
规划的完备性概念
(1)完备规划器:在有限的时间内正确查找一条规划的路径
(2)概率完备性:如果解存在,规划器最终会找到它,使用随机采样
(3)解决方案完备性:与上述一样,但基于确定性采样(例如,在固定网格上采样)
内容概要:
(1)PRM
(2)RRT
(3)基于优化的采样方法
(4)先进的路径规划方法
(5)实现
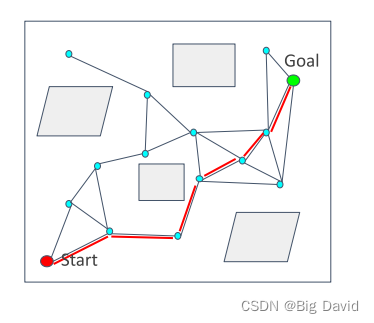
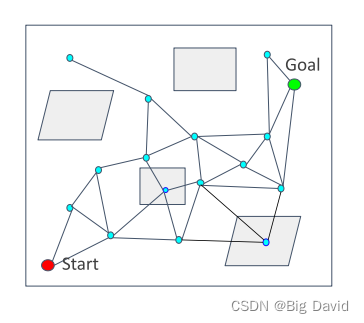
1 PRM
论文链接:https://ieeexplore.ieee.org/abstract/document/508439/

PRM:
(1)图结构
(2)分解为两个阶段:①学习 ②查询
①:在C-space上采样N个点 ;删除那些在障碍物里的点;连接到最近的点,并获得无碰撞段;删除与障碍物冲突的线段。
②:在路线图上搜索从起点到目标的路径(使用Dijkstra算法或A* 算法);路线图现在类似于栅格地图(或简化栅格地图)
(3)可以有效地检查采样配置和样本之间的连接是否存在碰撞
(4)相对少的步骤和局部路径就足以捕获自由空间的连通性
PRM的优缺点
优点:
简单,只需要调整参数即可实现不同场景下的路径规划,且不需要对环境中的障碍物进行精确建模,在高维空间和动态环境中的路径规划有很大优势。
缺点:
①需要处理两点边界值的问题
②在状态空间上构建图,但不特别关注生成路径(不关注启发式的添加)
③该算法存在狭窄通路问题,当规划的路径需要通过密集的障碍物或者需要经过狭窄的通道时,PRM方法的效率变的低下
为了提高效率
Lazy collision-checking
①碰撞检测过程非常耗时,特别是在复杂或高维的环境中。
②采样点并生成线段,而不考虑碰撞(Lazy)
③必要时进行碰撞检查:在未进行碰撞检查的情况下生成的道路图上查找路径
如果路径不是无碰撞的,则删除相应的边和节点
④重新启动路径查找
PRM算法伪代码:

V
V
V表示随机点集,
E
E
E表示路径集
①随机采样一个无碰撞的点,将这个无碰撞的点加入
V
V
V中,重复
n
n
n次
②生成概率路图
- 对 V V V中的每个点 q q q,根据一定的距离范围选择 k k k个邻域点
- 对每个邻域点 q ′ q' q′进行判断,如果 q q q和 q ′ q' q′尚未形成路径,则将其连接形成路径,随后进行碰撞检测,若无碰撞,则保留该路径。
- 按上述步骤建完图,使用图搜索算法搜索出一条最短路径。
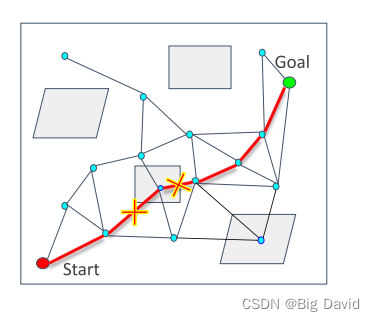
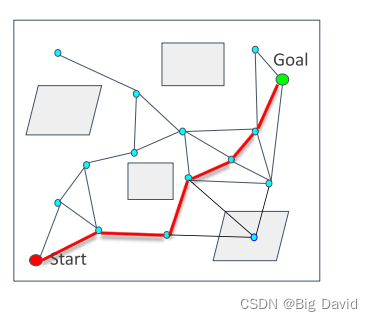
2 RRT
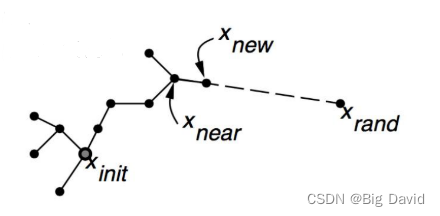
①算法通常将起点作为根节点
x
i
n
i
t
x_{init}
xinit?,加入到随机树的节点集合中
②从可行区域内随机选取一个节点
x
r
a
n
d
x_{rand}
xrand?,并在已生成的树中利用欧氏距离判断距离
x
r
a
n
d
x_{rand}
xrand?最近的点
x
n
e
a
r
x_{near}
xnear?
③从
x
n
e
a
r
x_{near}
xnear?与
x
r
a
n
d
x_{rand}
xrand?的连线方向上扩展固定步长
u
u
u,得到新节点
x
n
e
w
x_{new}
xnew?(如果
x
n
e
a
r
x_{near}
xnear?与
x
r
a
n
d
x_{rand}
xrand?间的距离小于步长,则直接将
x
r
a
n
d
x_{rand}
xrand?作为新节点
x
n
e
w
x_{new}
xnew?)。
④若
x
n
e
w
x_{new}
xnew?与
x
n
e
a
r
x_{near}
xnear?之间无障碍物,将
x
n
e
w
x_{new}
xnew?加入到随机树的节点集合中,同时将
x
n
e
a
r
x_{near}
xnear?作为
x
n
e
w
x_{new}
xnew?的父节点,将边
(
x
n
e
a
r
,
x
n
e
w
)
(x_{near},x_{new})
(xnear?,xnew?)加入到随机树的边集中
⑤若这两个节点间有障碍物,则重新选择
x
n
e
a
r
x_{near}
xnear?并进行扩展。
循环执行以上步骤,直到随机树的叶节点包含了目标点,并从中找出一条各节点连接成的从起点至终点的无碰撞路径。
采样过程是完全随机的,但是我们可以在采样时以一定的概率直接采样终点作为 x r a n d x_{rand} xrand? ,加快搜索速度。
RRT概述:
单查询算法,目标是尽可能快的找到一条从起点到终点的可行路径;模拟树木生长时树根不断向四周扩散的过程
RRT的优缺点:
优点:
(1)旨在找到从开始到目标的路径,若能够获得全局环境并进行建模,可进行全局路径规划。若无法获得全局环境,如自动驾驶汽车路径规划问题,能够在动态规划中对局部地图进行规划以生成局部路径
(2)比PRM更有针对性
缺点:
(1)非最优解决方案;当路径中包含障碍物之间形成的狭窄通道时,使用RRT算法规划路径有一定几率无法规划出最优路径
(2)效率不高,留有改进空间
(3)在整个空间采样
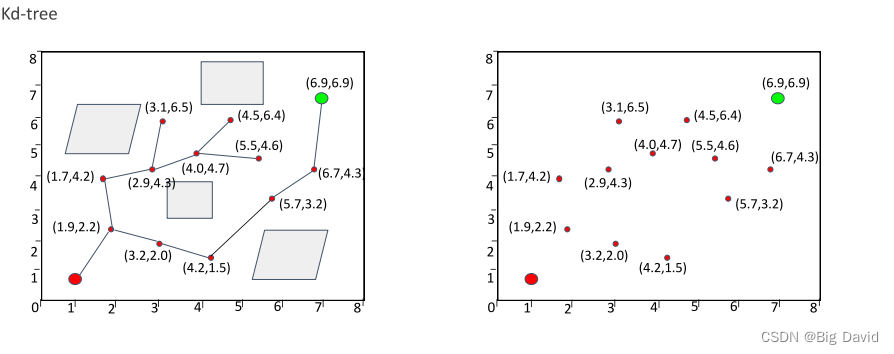
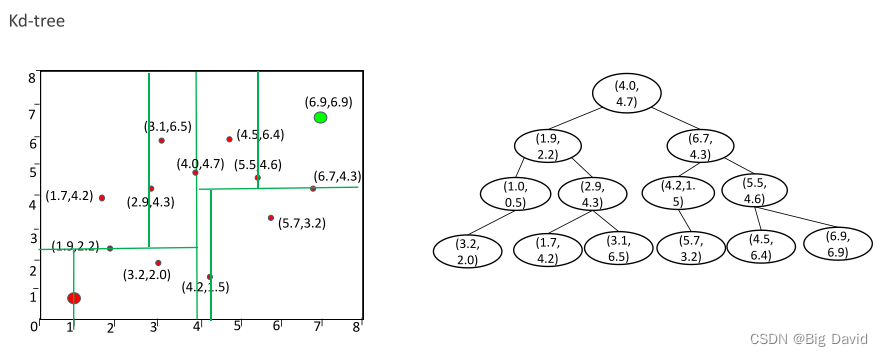
为了提高效率:
(1)引入Kd-tree
参考博客:https://blog.csdn.net/junshen1314/article/details/51121582
(2)双向RRT / RRT连接
①RRT-Connect算法在RRT的基础上引入了双树扩展环节,分别以起点和目标点为根节点同时扩展随机树从而②实现对状态空间的快速搜索。
当两棵树建立连接时可认为路径规划成功。
③通过一次采样得到一个采样点
q
r
a
n
d
q_{rand}
qrand?,然后两棵搜索树同时向采样点?方向进行扩展,加快两棵树建立连接的速度。相较于单树扩展的RRT算法,RRT-Connect加入了启发式步骤,加快了搜索速度,对于狭窄通道也具有较好的效果。
特点:
(1)Connect算法较之前的算法在扩展的步长上更长,使得树的生长更快
(2)两棵树不断朝向对方交替扩展,而不是采用随机扩展的方式,特别当起始位姿和目标位姿处于约束区域时,两棵树可以通过朝向对方快速扩展而逃离各自的约束区域
(3)带有启发性的扩展使得树的扩展更加贪婪和明确,使得双树RRT算法较之单树RRT算法更加有效
缺点:都是单查询算法,最终路径并不是最优的
总结RRT:
(1)逐步构建
(2)快速搜索
(3)关键功能:Sampling, Nearest, Collision-checking
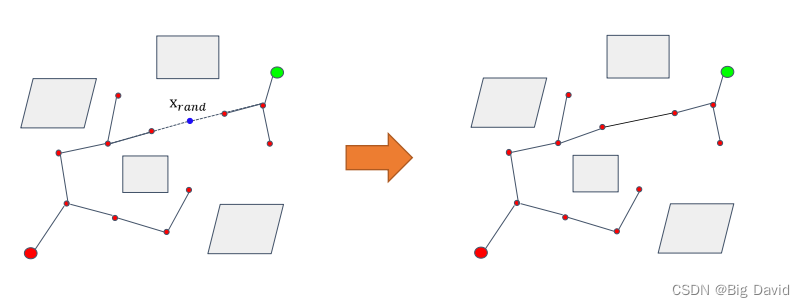
3 基于优化的采样方法
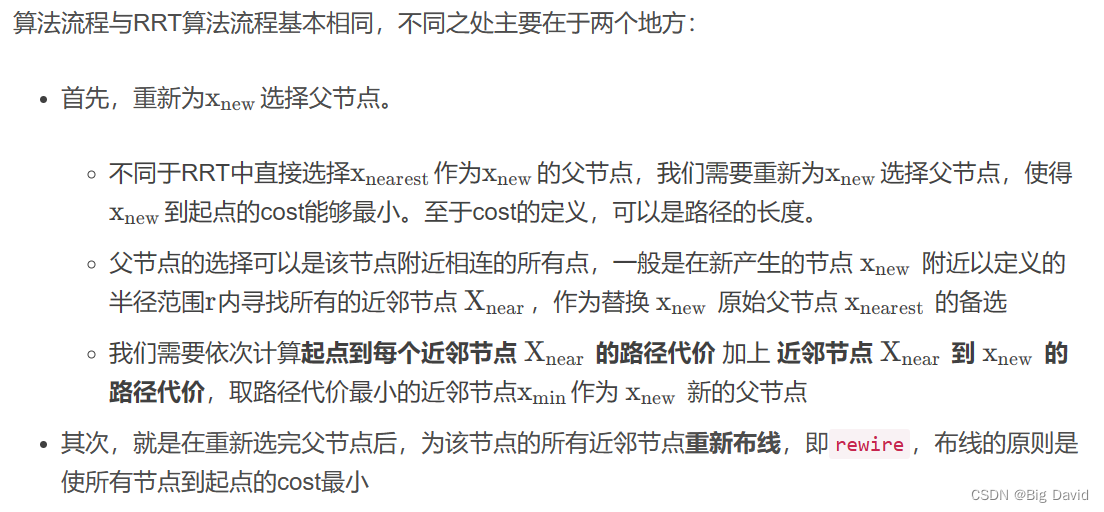
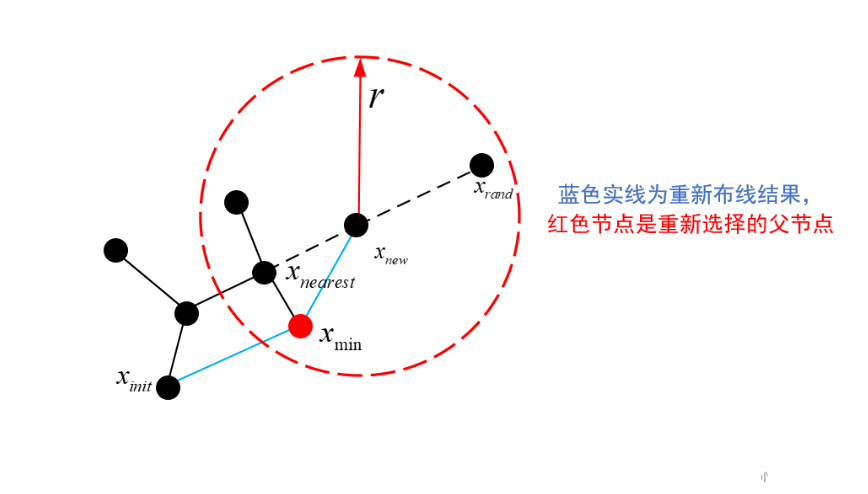
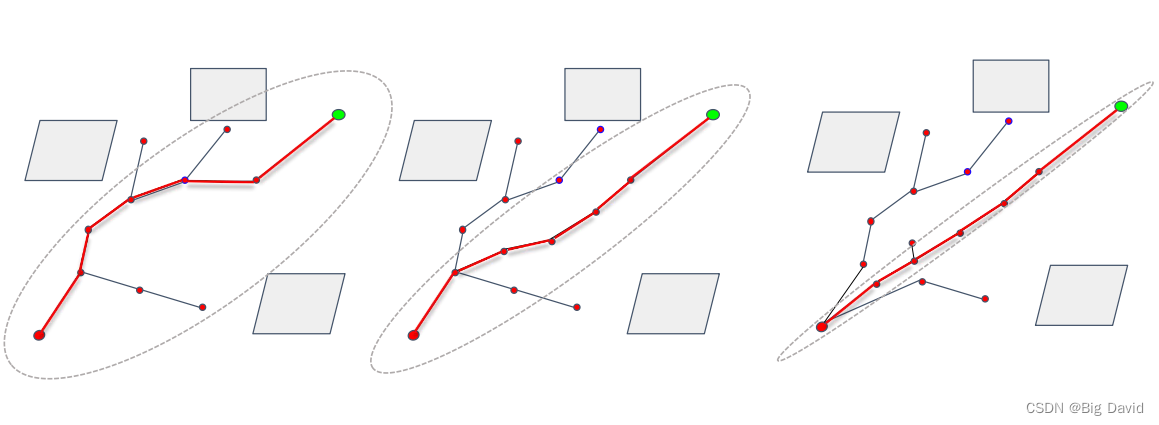
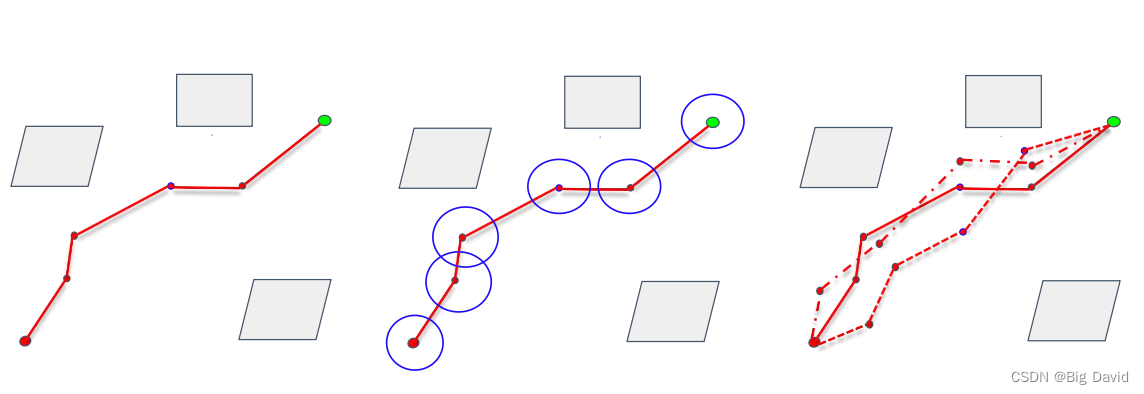
RRT*是渐进最优算法
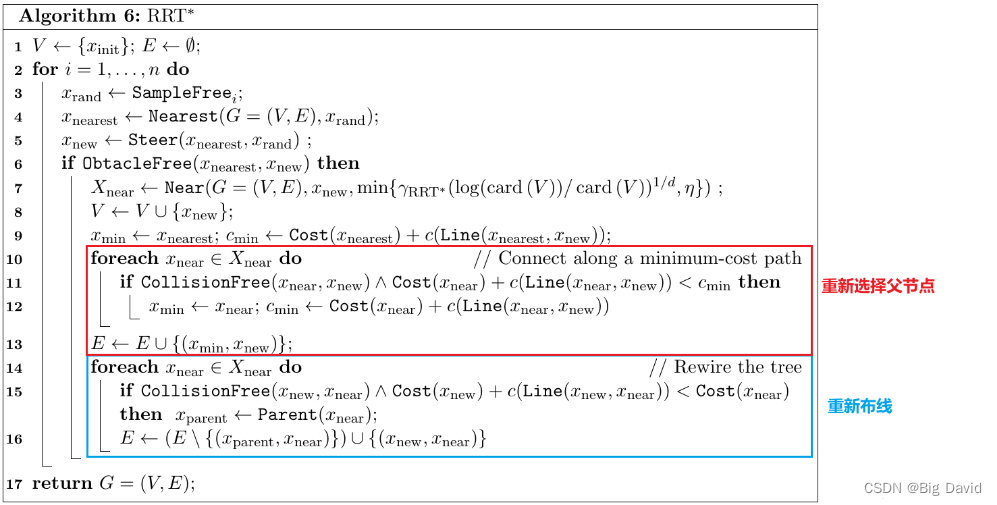
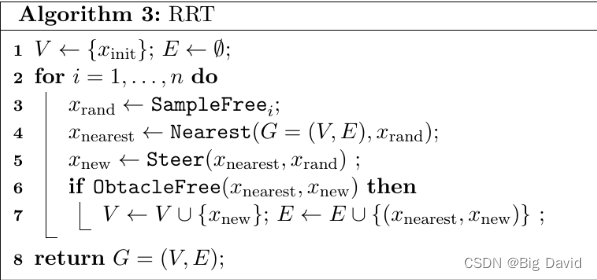
- S a m p l e F r e e SampleFree SampleFree:在可行的区域内随机采样
- N e a r e s t ( G , x r a n d ) Nearest(G,x_{rand}) Nearest(G,xrand?):在已生成的树中利用欧氏距离判断距离 x r a n d x_{rand} xrand?最近的点 x n e a r e s t x_{nearest} xnearest?
- S t e e r ( x n e a r e s t , x r a n d ) Steer(x_{nearest},x_{rand}) Steer(xnearest?,xrand?): 从 x n e a r e s t x_{nearest} xnearest?与 x r a n d x_{rand} xrand?的连线方向上扩展固定步长得到新节点 x n e w x_{new} xnew?
- L i n e ( x n e a r e s t , x n e w ) Line(x_nearest, x_new) Line(xn?earest,xn?ew):两个点之间的直线距离(欧氏距离)
- CollisionFree和ObstacleFree:都是判断两个节点之间是否有障碍物
Kinodynamic-RRT*

更改Steer()函数以适应机器人导航中的运动或其他约束
Anytime-RRT*
当机器人执行当前轨迹时,继续优化RRT树,讲究一个实时!!
4 基于采样的先进方法
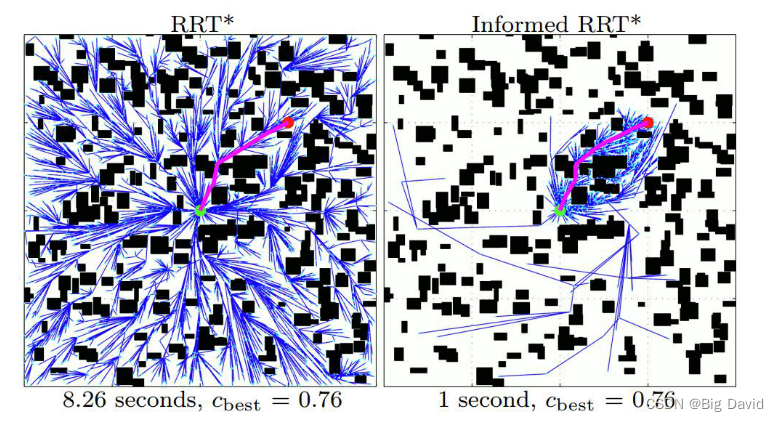
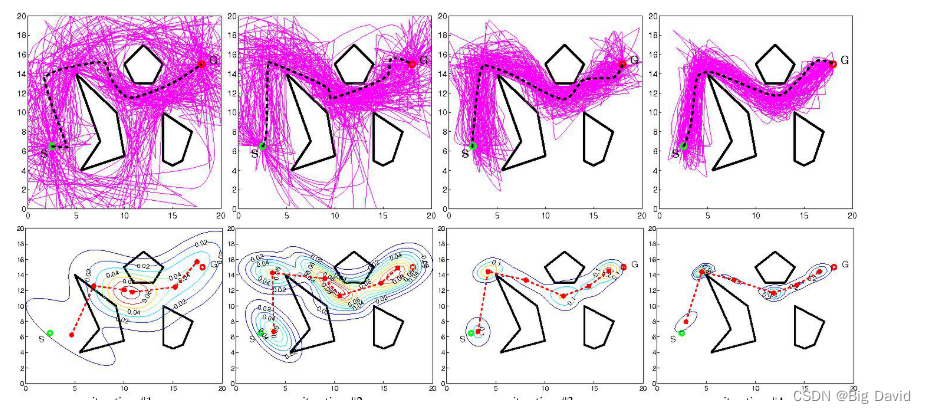
informed RRT*(启发式)
Cross-entropy motion planning

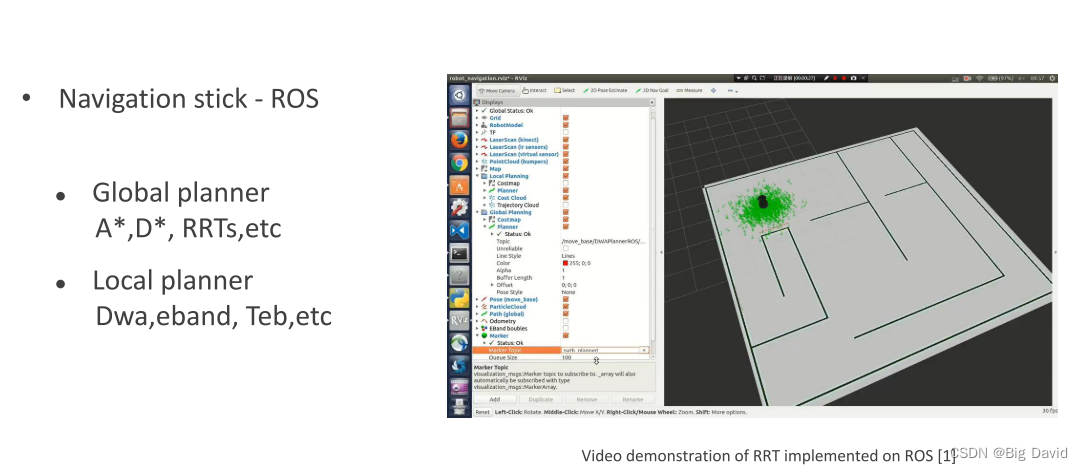
5 实现
OMPL
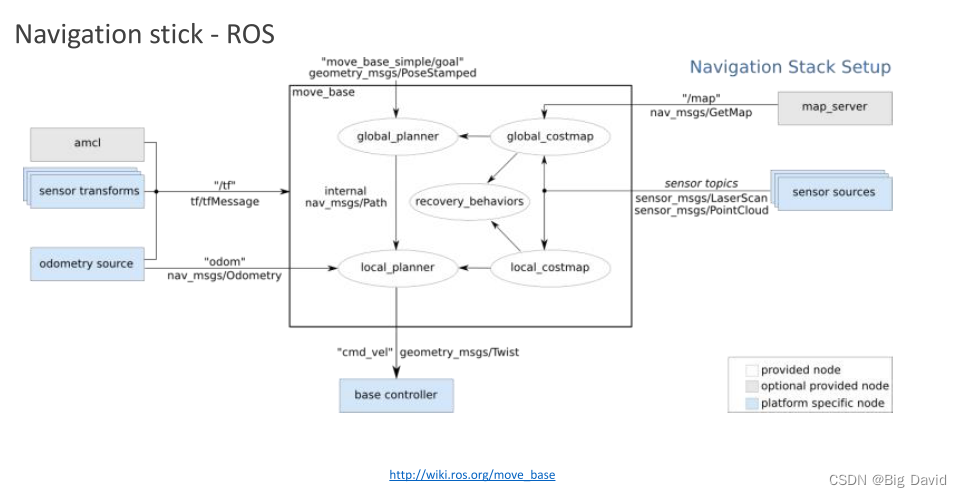
Moveit with ROS
Tutorials
加油😀
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 全面了解SSD,SSD关键术语全面解析
- 物联网七种通信协议介绍,一起来了解一下吧
- iPad绘画之旅:从小白到文创手账设计的萌系简笔画探索
- 生成式 AI 动画技术概述,满满干货,认真看完让你离大佬更一步
- java SSM水质历史数据可视化设计myeclipse开发mysql数据库springMVC模式java编程计算机网页设计
- Open CASCADE学习|一种快速定位缺失的链接库的方法
- 2024华数杯国际大学生数学建模A题思路+代码+模型+论文
- uniapp分包
- Scala学习二:访问修饰符/运算符
- 数据库第三章SQL课后习题及答案