最优化理论复习--最优性条件(二)
上一篇
约束极值问题的最优性条件
基本概念
- 凸规划
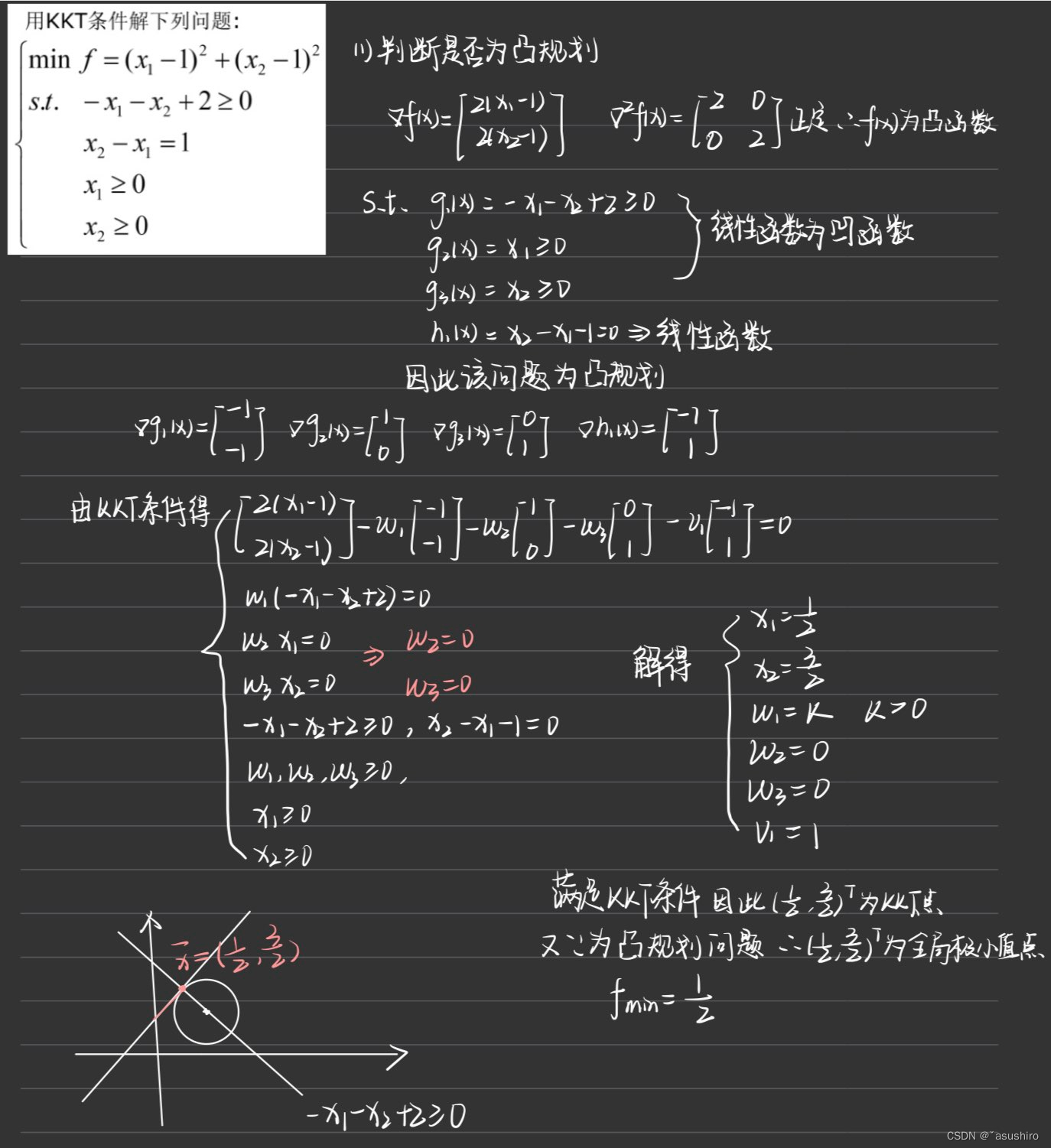
m i n f ( x ) min f(x) minf(x)
s . t . { g i ( x ) ≥ 0 , 不 等 式 约 束 h j ( x ) = 0 , 等 式 约 束 s.t.\left \{\begin{matrix} g_i (x) \geq 0,不等式约束 \\ \\h_j(x) = 0,等式约束 \end {matrix} \right. s.t.????gi?(x)≥0,不等式约束hj?(x)=0,等式约束?
其中 f ( x ) f(x) f(x) 是凸函数, g i ( x ) g_i(x) gi?(x) 是凹函数, h j ( x ) h_j(x) hj?(x) 是线性函数(线性函数既是凸函数又是凹函数)
要将 g i ( x ) g_i(x) gi?(x)变成 ≥ 0 \geq 0 ≥0的形式
判断凸函数的方法,求 f ( x ) f(x) f(x) 的海森矩阵如果矩阵为正定或半正定的,则它就为凸函数
对于凸规划问题中如果
x
ˉ
\bar{x}
xˉ 是KKT点则
x
ˉ
\bar{x}
xˉ 为整体极小值点
在
凸
规
划
中
K
K
T
点
?
整
体
极
小
值
点
在凸规划中 KKT点 \Leftrightarrow 整体极小值点
在凸规划中KKT点?整体极小值点
- 定义: 设 x ˉ \bar{x} xˉ 为可行点, 不等式约束中在 x ˉ \bar{x} xˉ 起作用约束 g i ( x ) , i ∈ I g_i(x),i \in I gi?(x),i∈I, 如果向量组 { ▽ g i ( x ˉ ) , ▽ h j ( x ˉ ) } \{\bigtriangledown g_i(\bar{x}), \bigtriangledown h_j(\bar{x}) \} {▽gi?(xˉ),▽hj?(xˉ)}线性无关,则称 x ˉ \bar{x} xˉ 为约束 g ( x ) ≥ 0 和 h ( x ) = 0 g(x) \geq 0 和 h(x) = 0 g(x)≥0和h(x)=0的正则点
若
x
ˉ
\bar{x}
xˉ 是曲面
S
S
S上的一个正则点,它所在的可微曲线的切向量组成空间的一个子空间
即前进方向为此时可行域的切向量
表示为
H
0
=
{
d
?
∣
▽
h
(
x
ˉ
)
T
d
=
0
}
H_0 = \{d\ | \bigtriangledown h(\bar{x})^T d = 0\}
H0?={d?∣▽h(xˉ)Td=0}
因此有
定理:设
x
ˉ
∈
S
\bar{x} \in S
xˉ∈S,
f
(
x
)
f(x)
f(x) 和
g
i
(
x
)
(
i
∈
I
)
g_i(x) (i \in I)
gi?(x)(i∈I) 在
x
ˉ
\bar{x}
xˉ 处连续,
h
j
h_j
hj? 在
x
ˉ
\bar{x}
xˉ 处可微,且
x
ˉ
\bar{x}
xˉ 是
S
S
S 上的正则点。如果
x
ˉ
\bar{x}
xˉ 是问题的局部最优解有
F
0
∩
G
0
∩
H
0
=
?
F_0 \cap G_0 \cap H_0 = \emptyset
F0?∩G0?∩H0?=?
一般情况的约束类型最优化条件
- (F - J条件) 设
x
ˉ
∈
S
\bar{x} \in S
xˉ∈S,
f
(
x
)
,
g
i
(
x
)
(
i
∈
I
)
f(x), g_i(x) (i \in I)
f(x),gi?(x)(i∈I)在
x
ˉ
\bar{x}
xˉ处可微,
g
i
(
x
)
(
x
?
I
)
g_i(x) (x \notin I)
gi?(x)(x∈/?I)在
x
ˉ
\bar{x}
xˉ 处连续(内部无空洞,
h
j
h_j
hj? 在
x
ˉ
\bar{x}
xˉ 处连续可微,如果
x
ˉ
\bar{x}
xˉ 是问题的局部最优解, 则存在不全为零的数
w
0
,
w
i
(
i
∈
I
)
w_0, w_i (i \in I)
w0?,wi?(i∈I) 和
?
的
v
j
\forall的 v_j
?的vj?, 使得
w 0 ▽ f ( x ˉ ) ? ∑ i ∈ I w i ▽ g i ( x ˉ ) ? ∑ j = 1 l v j ▽ h j ( x ˉ ) = 0 w_0 \bigtriangledown f(\bar{x}) - \sum\limits_{i \in I} w_i \bigtriangledown g_i(\bar{x}) - \sum\limits_{j = 1}^{l} v_j\bigtriangledown h_j(\bar{x}) = 0 w0?▽f(xˉ)?i∈I∑?wi?▽gi?(xˉ)?j=1∑l?vj?▽hj?(xˉ)=0
同理通常不研究 w 0 = 0 w_0 = 0 w0?=0的极端情况,所以有:
- (KKT必要条件)设
x
ˉ
\bar{x}
xˉ为可行点,
f
(
x
)
,
g
i
(
x
)
(
i
∈
I
)
f(x), g_i(x) (i \in I)
f(x),gi?(x)(i∈I)在
x
ˉ
\bar{x}
xˉ处可微,
g
i
(
x
)
(
x
?
I
)
g_i(x) (x \notin I)
gi?(x)(x∈/?I)在
x
ˉ
\bar{x}
xˉ 处连续(内部无空洞,
h
j
h_j
hj? 在
x
ˉ
\bar{x}
xˉ 处连续可微,向量组
{
▽
g
i
(
x
ˉ
)
,
▽
h
j
(
x
ˉ
)
}
\{\bigtriangledown g_i(\bar{x}), \bigtriangledown h_j(\bar{x}) \}
{▽gi?(xˉ),▽hj?(xˉ)}线性无关,如果
x
ˉ
\bar{x}
xˉ 是问题的局部最优解, 则存在数
w
i
(
i
∈
I
)
w_i (i \in I)
wi?(i∈I) 和
?
的
v
j
\forall的 v_j
?的vj?, 使得
▽ f ( x ˉ ) ? ∑ i ∈ I w i ▽ g i ( x ˉ ) ? ∑ j = 1 l v j ▽ h j ( x ˉ ) = 0 \bigtriangledown f(\bar{x}) - \sum\limits_{i \in I} w_i \bigtriangledown g_i(\bar{x}) - \sum\limits_{j = 1}^{l} v_j\bigtriangledown h_j(\bar{x}) = 0 ▽f(xˉ)?i∈I∑?wi?▽gi?(xˉ)?j=1∑l?vj?▽hj?(xˉ)=0
因此为了求KKT条件需要知道另一种使用松弛定理的表述形式:
- 设 x ˉ \bar{x} xˉ为可行点, f ( x ) , g i ( x ) f(x), g_i(x) f(x),gi?(x)在 x ˉ \bar{x} xˉ处可微, h j h_j hj? 在 x ˉ \bar{x} xˉ 处连续可微,向量组 { ▽ g i ( x ˉ ) , ▽ h j ( x ˉ ) } \{\bigtriangledown g_i(\bar{x}), \bigtriangledown h_j(\bar{x}) \} {▽gi?(xˉ),▽hj?(xˉ)}线性无关,如果 x ˉ \bar{x} xˉ 是问题的局部最优解, 则存在数 w i ( i = 1 , 2... m ) w_i (i = 1,2...m) wi?(i=1,2...m) 和 ? 的 v j \forall的 v_j ?的vj?, 使得
{ ▽ f ( x ˉ ) ? ∑ i = 1 m w i ▽ g i ( x ˉ ) ? ∑ j = 1 l v j ▽ h j ( x ˉ ) = 0 w i g i ( x ˉ ) = 0 , i = 1 , 2 , . . m w i ≥ 0 , i = 1 , 2... m \left \{\begin{matrix} \bigtriangledown f(\bar{x}) - \sum\limits_{i = 1}^{m} w_i \bigtriangledown g_i(\bar{x}) - \sum\limits_{j = 1}^{l} v_j\bigtriangledown h_j(\bar{x}) = 0 \\ \\ w_i g_i(\bar{x}) = 0, i = 1,2,..m \\ \\w_i \geq 0, i = 1,2...m \end {matrix} \right. ????????????????▽f(xˉ)?i=1∑m?wi?▽gi?(xˉ)?j=1∑l?vj?▽hj?(xˉ)=0wi?gi?(xˉ)=0,i=1,2,..mwi?≥0,i=1,2...m?
为了使描述更加方便,定义广义的Lagrange函数:
L
(
x
,
w
,
v
)
=
f
(
x
)
?
∑
i
=
1
m
w
i
g
i
(
x
)
?
∑
j
=
1
l
v
j
h
j
(
x
)
L(x, w, v) = f(x) - \sum\limits_{i = 1}^{m} w_i g_i(x) - \sum\limits_{j = 1}^{l} v_j h_j(x)
L(x,w,v)=f(x)?i=1∑m?wi?gi?(x)?j=1∑l?vj?hj?(x)
将对应的参数 w w w, v v v 称为拉格朗日乘子
因此KKT条件用拉格朗日函数的表达形式就成了设
x
ˉ
\bar{x}
xˉ为可行点,
f
(
x
)
,
g
i
(
x
)
f(x), g_i(x)
f(x),gi?(x)在
x
ˉ
\bar{x}
xˉ处可微,
h
j
h_j
hj? 在
x
ˉ
\bar{x}
xˉ 处连续可微,向量组
{
▽
g
i
(
x
ˉ
)
,
▽
h
j
(
x
ˉ
)
}
\{\bigtriangledown g_i(\bar{x}), \bigtriangledown h_j(\bar{x}) \}
{▽gi?(xˉ),▽hj?(xˉ)}线性无关,若
x
ˉ
\bar{x}
xˉ 是局部最优解, 则存在乘子向量
w
ˉ
≥
0
,
v
ˉ
\bar{w} \geq 0, \bar{v}
wˉ≥0,vˉ 使得
▽
x
L
(
x
ˉ
,
w
ˉ
,
v
ˉ
)
=
0
\bigtriangledown_x L(\bar{x}, \bar{w}, \bar{v}) = 0
▽x?L(xˉ,wˉ,vˉ)=0
- 一阶充分条件: 当是凸规划是KKT条件就是它的充分条件
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- CentOS7安装docker
- css如何让滚动条不占用宽度 hover上去会显示滚动条
- 大模型日报-20240119
- linux中playbook的控制语句
- DDIA 第三章:存储与检索
- 黑群晖DSM7.x半洗白状态 免全洗白 破解 激活Advanced Media Extensions 3.0.0 3.1.0或以上版本套件
- SpringBoot获取HttpServletRequest、HttpServletResponse的三种方式
- 自动化测试工具发挥着哪些关键作用
- 基于OHTPPS实现网站HTTPS访问
- 如何判断光模块失效以及光模块应用注意点