全志R128系统RTOS使用说明
发布时间:2024年01月05日
使用串口访问设备
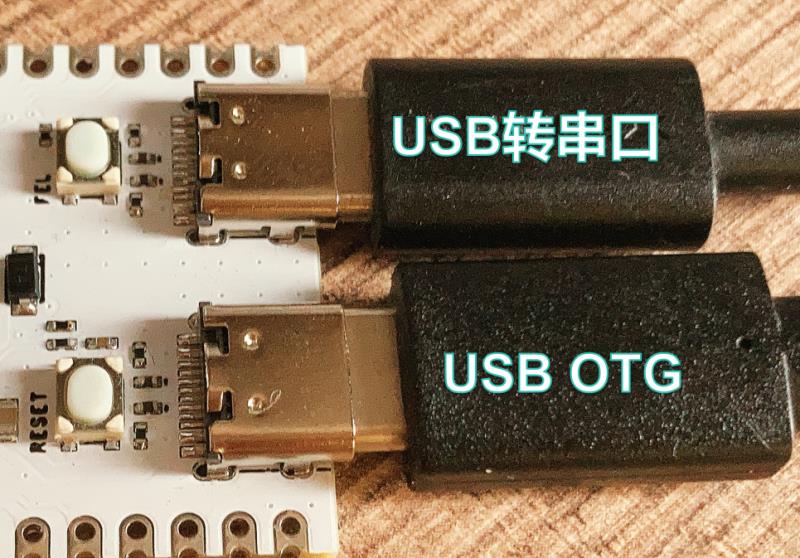
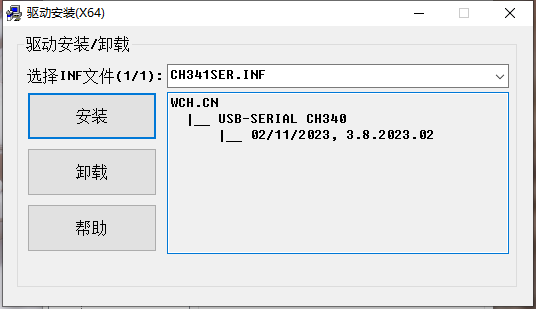
使用USB TypeC 连接线连接开发板 USB转串口 的接口,安装串口驱动程序:CH341SER.EXE
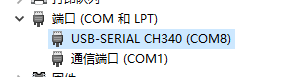
到设备管理器找到需要的串口,这里是?COM8
使用串口访问工具 PuTTY 打开串口,这里是 COM8,波特率 115200。
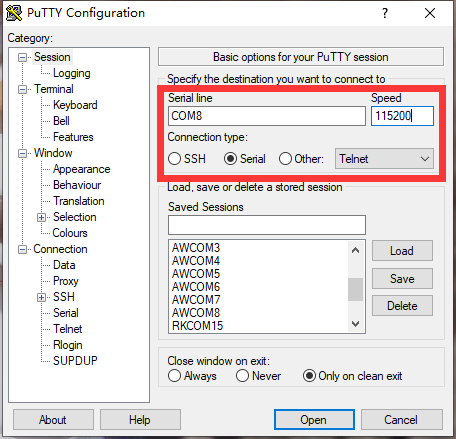
打开之后回车即可访问控制台。
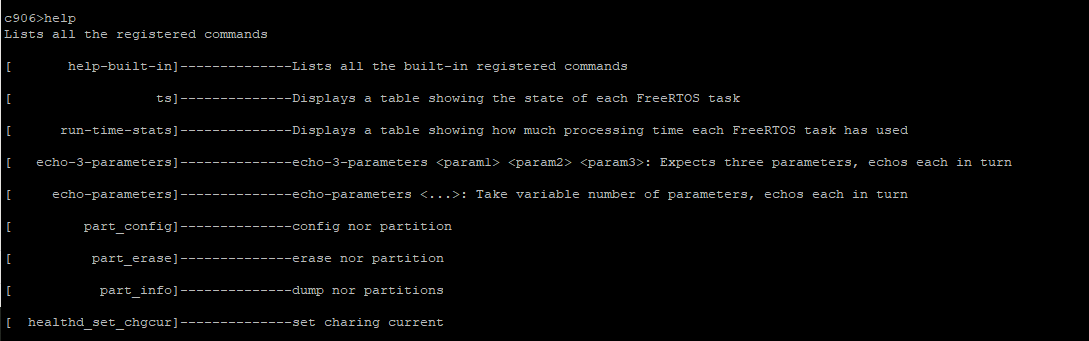
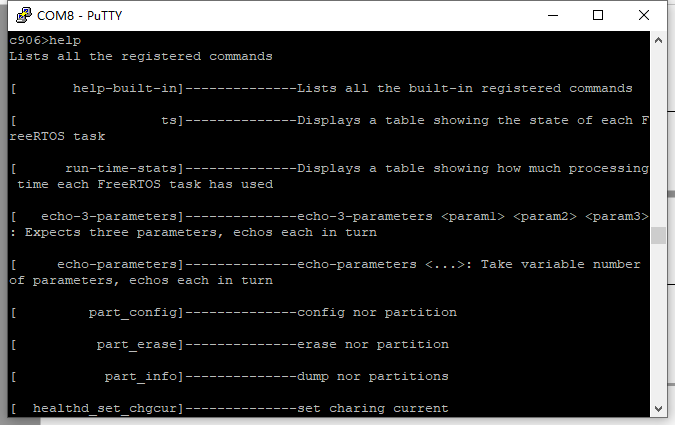
可以输入?help?命令查看支持的命令。
查看三个核心运行频率
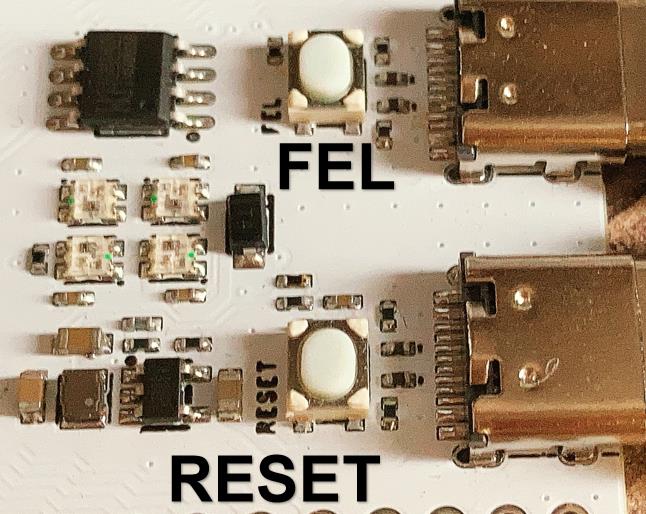
连接开发板的时候可以点击 RESET 按钮重置 CPU,查看输出。
这里可以看到 M33 核心运行频率 192MHz,DSP 运行频率 400MHz,C906 运行频率 480MHz

系统调试命令
help
help
获取系统支持的终端命令
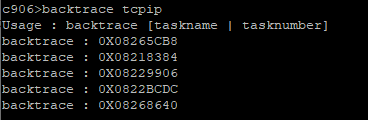
backtrace
查看指定任务堆栈回溯信息
backtrace [taskname | tasknumber]
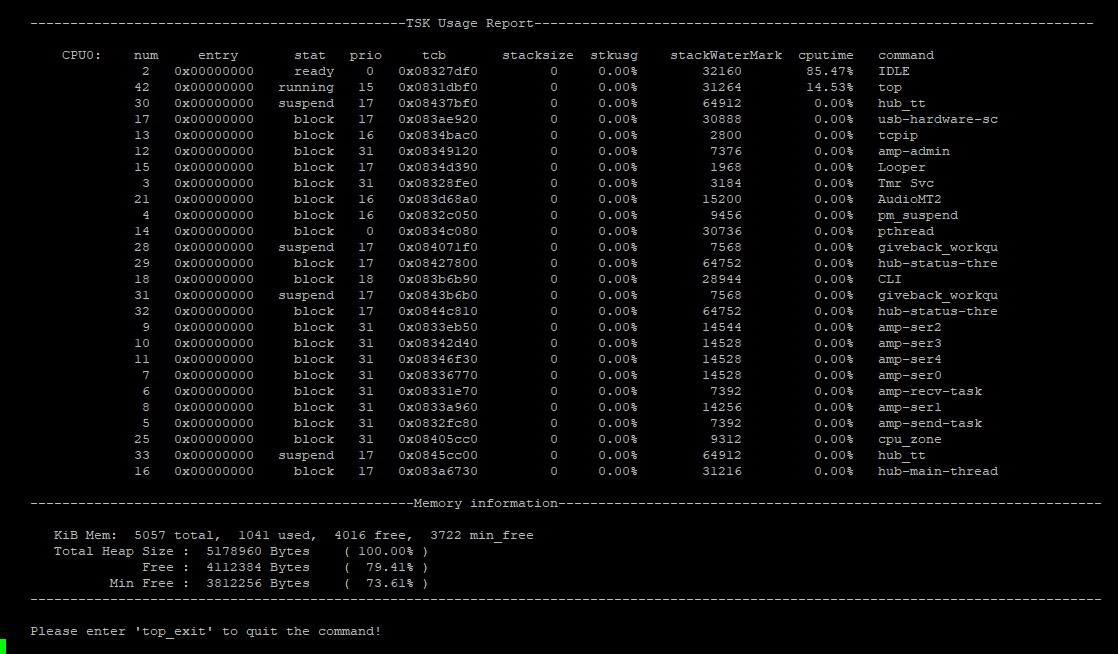
top
查看系统任务状态
top [?d 2]
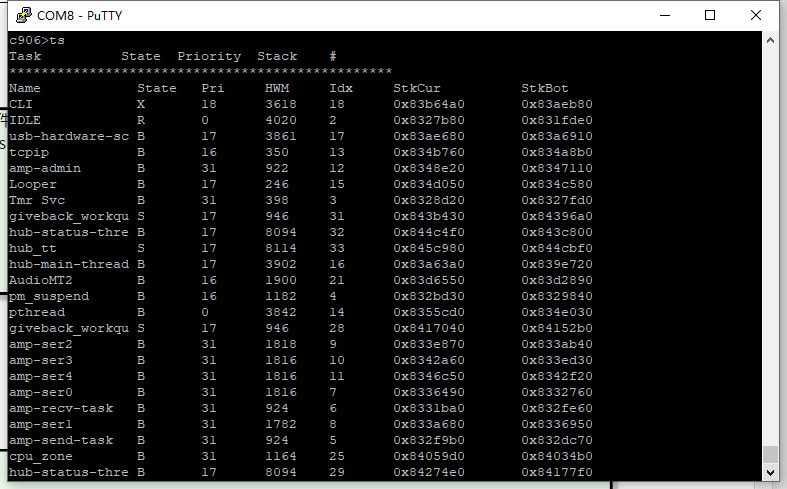
ts
展示所有FreeRTOS任务的状态
ts
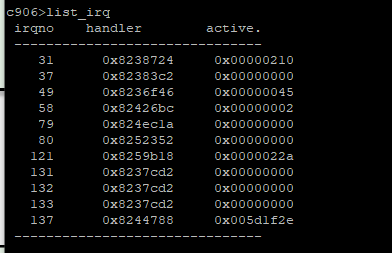
list_irq
列出所有支持的中断及其状态
list_irq
free
查看系统堆的内存
free

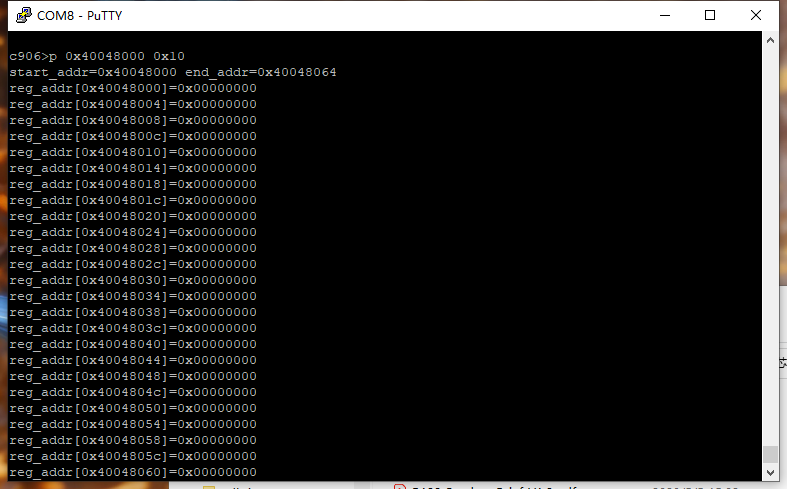
p
读取地址?reg_start_addr?对应长度?len?的内容
p [reg_start_addr] [len]
m
向地址?reg_address?写值?reg_value
m [reg_address] [reg_value]
![]()
forkarg
修改fork命令参数,可设置fork命令创建的任务的优先级及其栈大小
forkarg [?p priority] [?s size]

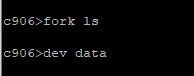
fork
不占用控制台任务,在后台运行命令
fork command [arg1 ...]
文件系统命令
df
查看文件系统剩余空间
df [path]

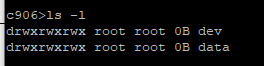
ls
列出指定文件或者目录信息
ls [?h] [?l] [?k] [file1]
cat
以ACSII码的形式,读取指定的文件
cat <file>
![]()
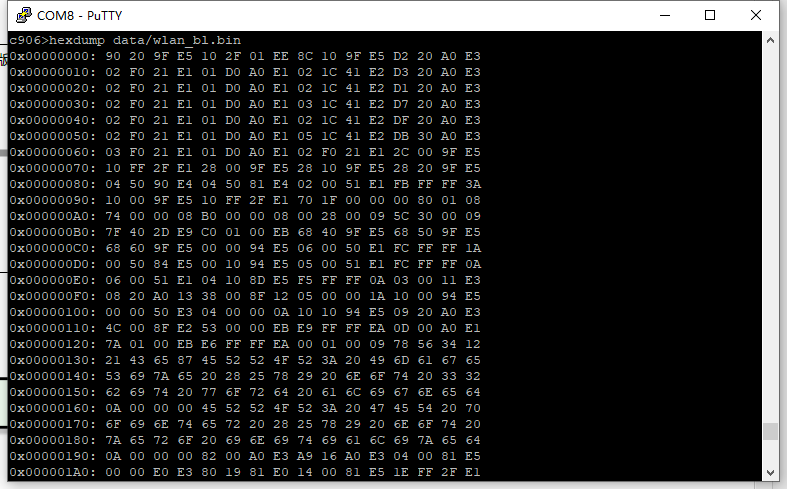
hexdump
查看二进制文件内容
hexdump [?n num] [?C] file
跨核心控制台
由于 R128 同时运行三个独立的 RTOS,有些时候需要操作其他核心的 RTOS,每次都要在SDK切换控制台比较麻烦,所以可以使用跨核心控制台操作其他核心的 RTOS
命令:
rpccli [arm|dsp|rv] commandname [arg0 ...]
例子
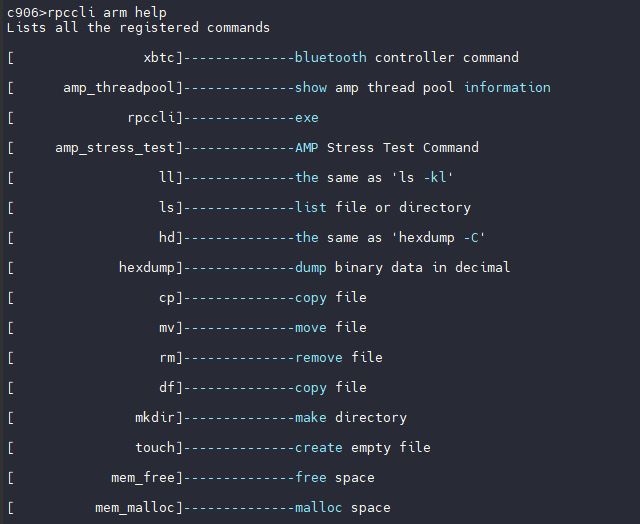
- 查看 M33 核心 RTOS 的可用控制台命令
rpccli arm help
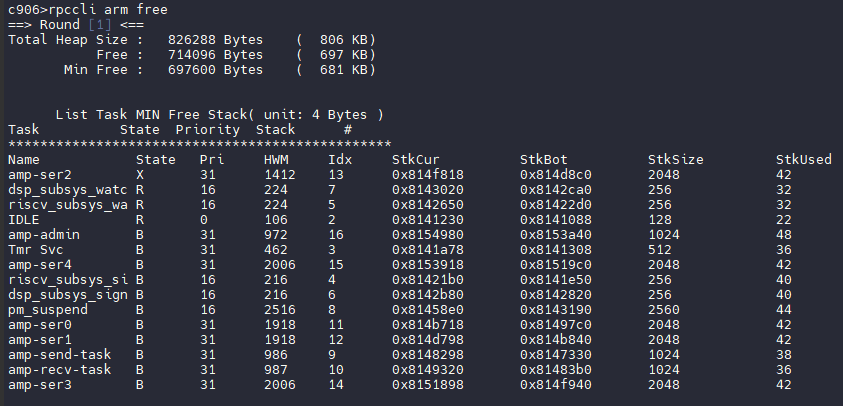
- 查看 M33 核心目前占用的内存
rpccli arm free
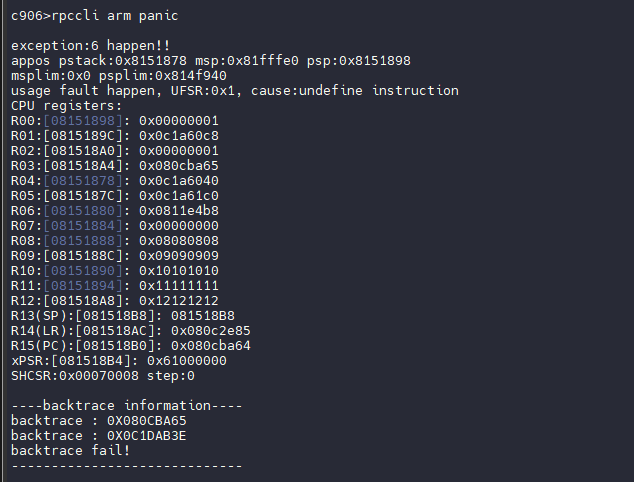
- 强制 PANIC M33 核心
注意:PANIC 后控制台将无法操作
rpccli arm panic
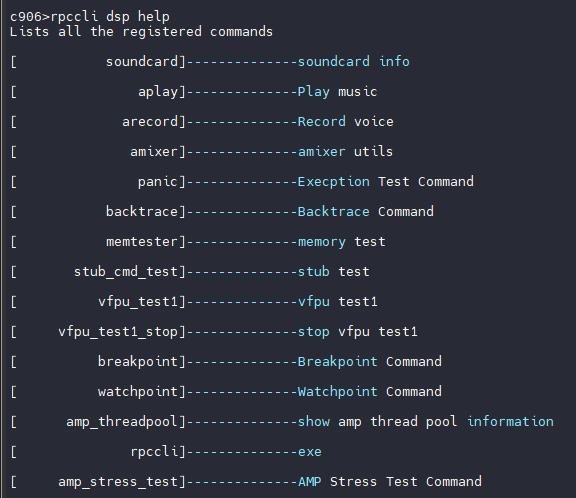
- 查看 DSP 核心 RTOS 的可用控制台命令
rpccli dsp help
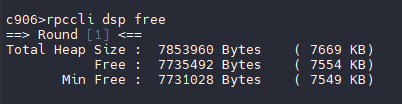
- 查看 DSP 核心 RTOS 占用的内存
rpccli dsp free
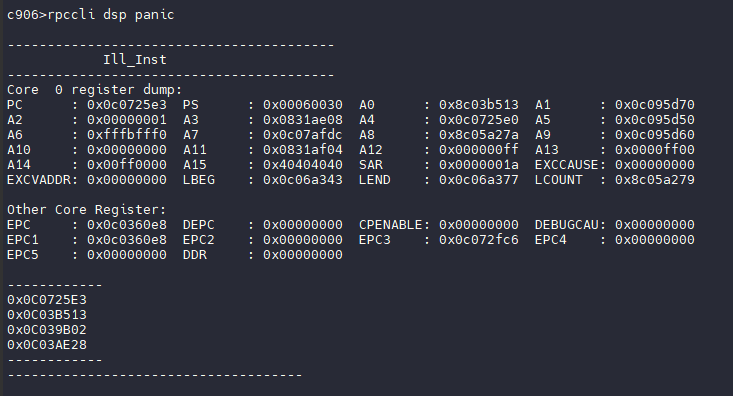
- 强制 PANIC DSP 核心
rpccli dsp panic
文章来源:https://blog.csdn.net/weixin_43094346/article/details/135402876
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 三叠云流程制造ERP:构建智慧工厂,实现高效生产管理
- Java SE入门及基础(11)
- Zynq学习笔记:00 Vivado block diagram
- vue学习笔记-2
- 交通流量预测:T-GCN A Temporal Graph Convolutional Network for Traffic Prediction
- MSA【4】:DeSAM
- Oracle11gR2限制指定IP访问
- 栅极驱动 IC 自举电路的设计与应用指南
- 大数据技术原理及应用课实验4: NoSQL和关系数据库的操作比较
- 生产白酒加工酿造的污水如何处理达标