Java并发之互斥二:ReentrantLock(基于公平锁)
发布时间:2024年01月12日
1.构造方法

不传参数默认是非公平锁
根据传的fair是否公平来创建锁
- 基于公平锁来分析一下
 ``
``
所以最终我们又需要看到AQS这个类中,AQS是一个抽象的队列同步器
- AQS:
AQS内部类(对应同步队列的每一个节点):
static final class Node {
// 枚举:共享模式
static final Node SHARED = new Node();
// 枚举:独占模式
static final Node EXCLUSIVE = null;
// 表示当前节点处于取消状态
static final int CANCELLED = 1;
// 表示当前节点需要它的后续节点(SIGNAL 表示其实是 后续节点的状态,需要当前节点去喊它)
static final int SIGNAL = -1;
// 表示当前节点处于等待状态
static final int CONDITION = -2;
// 共享模式下的节点状态
static final int PROPAGATE = -3;
// node状态(0,SIGNAL(-1),CANCELLED(1),CONDITION(-2),PROPAGATE(-3))
// waitStatus == 0 是默认状态
// waitStatus >0 取消状态
// waitStatus == -1 表示当前节点如何是head节点时,释放锁之后,需要唤醒它的后续节点
volatile int waitStatus;
// 因为node需要构建成fifo 队列,索引prev指向前继节点
volatile Node prev;
// 因为node需要构建成fifo 队列,索引prev指向后续节点
volatile Node next;
// 线程本尊
volatile Thread thread;
// reentrantLock 没有用到
Node nextWaiter;
/**
* Returns true if node is waiting in shared mode.
*/
final boolean isShared() {
return nextWaiter == SHARED;
}
/**
* Returns previous node, or throws NullPointerException if null.
* Use when predecessor cannot be null. The null check could
* be elided, but is present to help the VM.
*
* @return the predecessor of this node
*/
final Node predecessor() {
Node p = prev;
if (p == null)
throw new NullPointerException();
else
return p;
}
/** Establishes initial head or SHARED marker. */
Node() {}
/** Constructor used by addWaiter. */
Node(Node nextWaiter) {
this.nextWaiter = nextWaiter;
THREAD.set(this, Thread.currentThread());
}
/** Constructor used by addConditionWaiter. */
Node(int waitStatus) {
WAITSTATUS.set(this, waitStatus);
THREAD.set(this, Thread.currentThread());
}
/** CASes waitStatus field. */
final boolean compareAndSetWaitStatus(int expect, int update) {
return WAITSTATUS.compareAndSet(this, expect, update);
}
/** CASes next field. */
final boolean compareAndSetNext(Node expect, Node update) {
return NEXT.compareAndSet(this, expect, update);
}
final void setPrevRelaxed(Node p) {
PREV.set(this, p);
}
// VarHandle mechanics
private static final VarHandle NEXT;
private static final VarHandle PREV;
private static final VarHandle THREAD;
private static final VarHandle WAITSTATUS;
static {
try {
MethodHandles.Lookup l = MethodHandles.lookup();
NEXT = l.findVarHandle(Node.class, "next", Node.class);
PREV = l.findVarHandle(Node.class, "prev", Node.class);
THREAD = l.findVarHandle(Node.class, "thread", Thread.class);
WAITSTATUS = l.findVarHandle(Node.class, "waitStatus", int.class);
} catch (ReflectiveOperationException e) {
throw new ExceptionInInitializerError(e);
}
}
}
AQS属性:
// 头节点:任何时刻 头节点对应的线程都是当前持锁线程
private transient volatile Node head;
// 阻塞队列的尾节点 (同步队列不包含head节点,head.next ---> tail认为是阻塞队列)
private transient volatile Node tail;
// 表示资源
// 独占模式:0 表示未加锁状态,>0 表示已经加锁状态
private volatile int state;
继承父类AbstractOwnableSynchronizer的属性:
// 独占模式:表示持有锁的线程
private transient Thread exclusiveOwnerThread;
2.加锁 lock方法
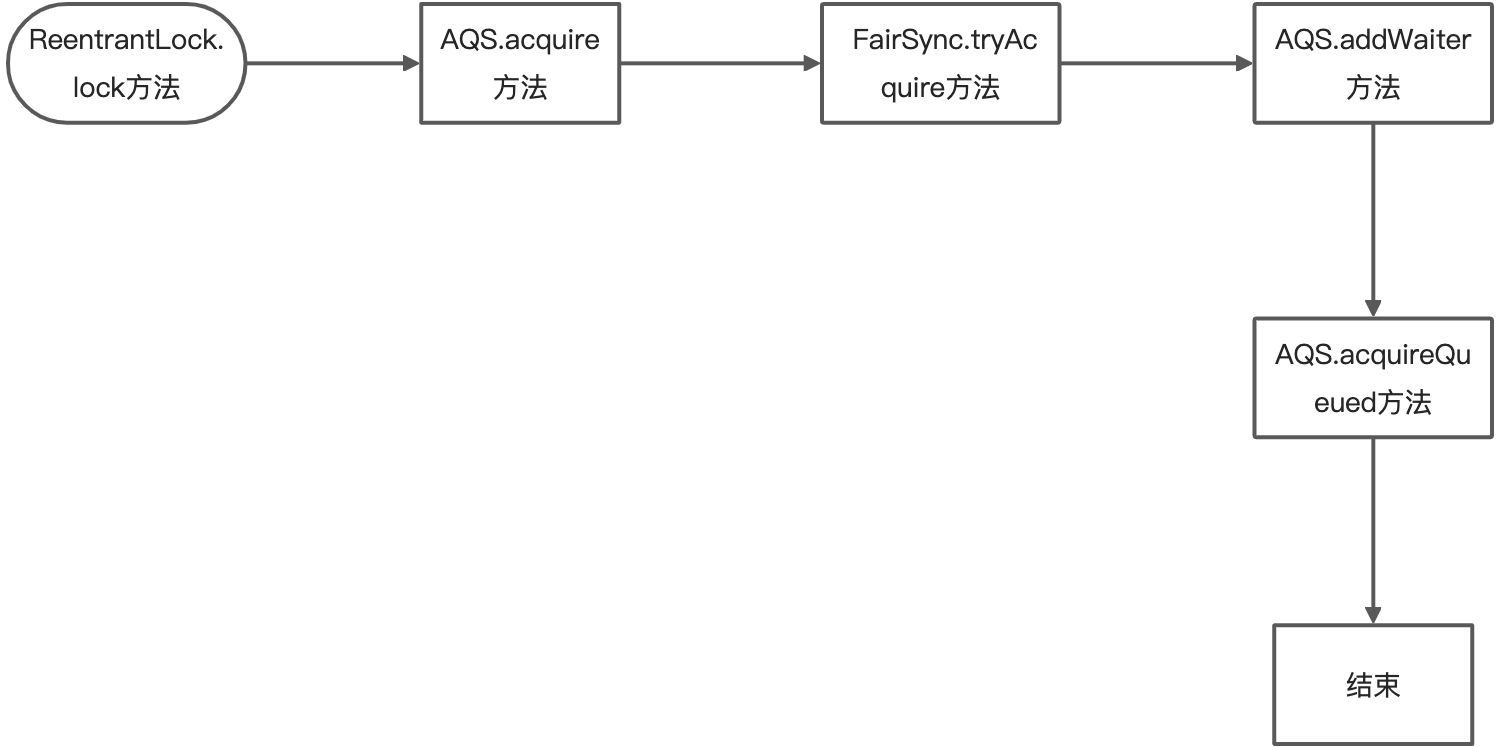
- acquire方法:
// aqs定义的获取锁的方法
public final void acquire(int arg) {
// 条件一: tryAcquire 尝试获取锁,获取成功返回true,获取失败返回false
// 条件二: 2.1:addWaiter 将当前线程封装成node入队
// 2.2:acquireQueued 挂起当前线程 唤醒后相关的逻辑
// acquireQueued 返回true 表示挂起过程中线程被中断唤醒过 false表示未被中断过
if (!tryAcquire(arg) &&
acquireQueued(addWaiter(Node.EXCLUSIVE), arg))
// 再次设置中断标记
selfInterrupt();
}
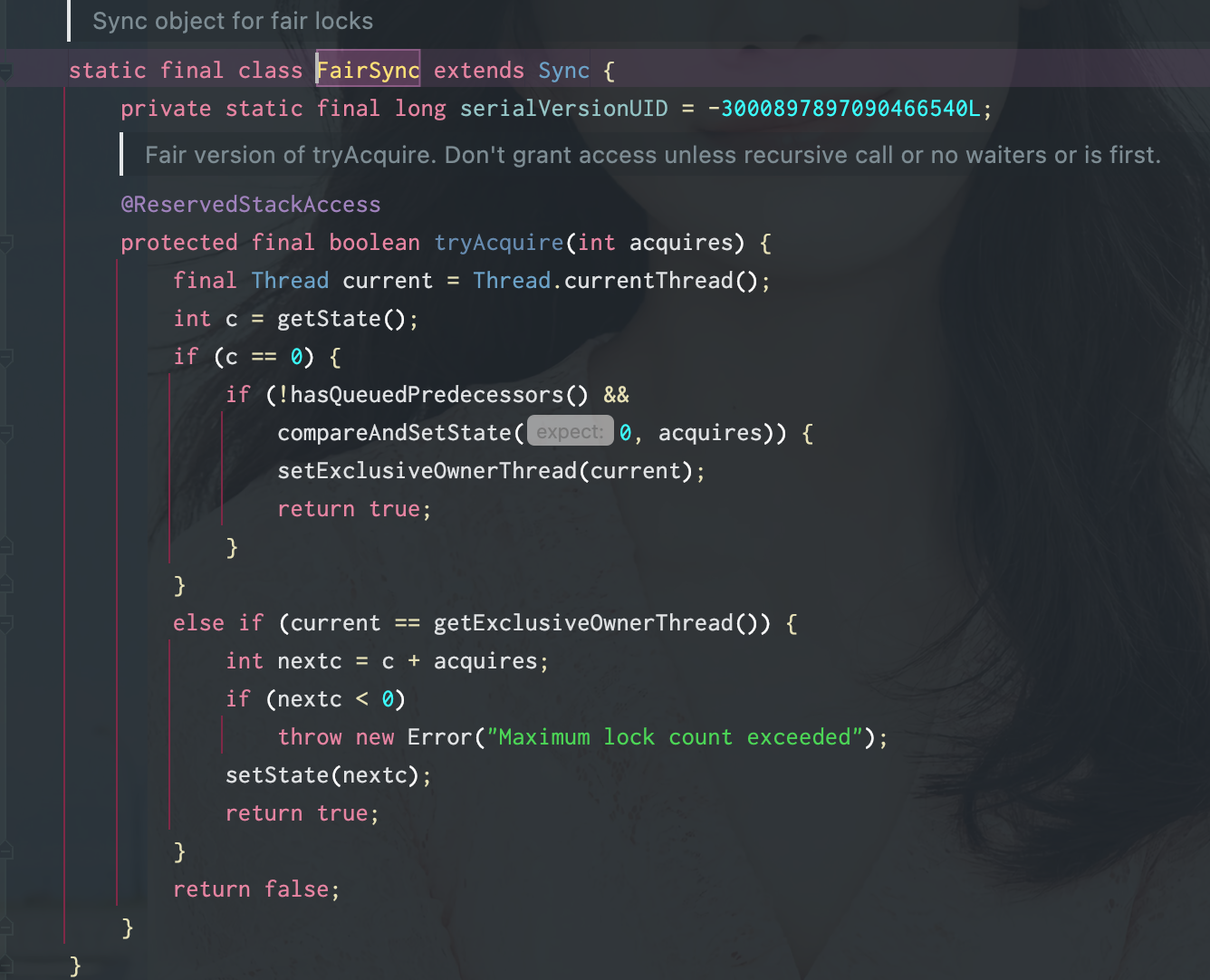
- tryAcquire方法
// 抢占成功:返回true
// 抢占失败:返回false
static final class FairSync extends Sync {
private static final long serialVersionUID = -3000897897090466540L;
/**
* Fair version of tryAcquire. Don't grant access unless
* recursive call or no waiters or is first.
*/
@ReservedStackAccess
protected final boolean tryAcquire(int acquires) {
// 当前线程
final Thread current = Thread.currentThread();
// AQS state值
int c = getState();
// 条件成立:c==0 表示当前AQS处于无锁状态
if (c == 0) {
// 条件一:
// 因为failSync是公平锁,任何时候都需要检查 同步队列中是否在当前线程之前有等待者
// hasQueuedPredecessors 返回true 表示当前线程前面有等待者,当前线程需要入队等待 返回false 表示无等待 直接尝试获取锁
if (!hasQueuedPredecessors() &&
// 条件二: compareAndSetState(0,acqures)
// 成功 说明当前线程获取锁成功 失败 说明存在竞争,且当前线程竞争失败
compareAndSetState(0, acquires)) {
// 设置当前线程为独占者 线程
setExclusiveOwnerThread(current);
return true;
}
}
// 执行到这里,有几种情况?
// c !=0 c>0 这种情况下就需要检查一下当前线程是不是独占锁的线程,因为reentrantlook是可以重入的
else if (current == getExclusiveOwnerThread()) {
// 锁重入的逻辑
int nextc = c + acquires;
// 越界判断,当重入的深度很深时,会导致 nextc<0,int值达到最大之后+1,会变成负数
if (nextc < 0)
throw new Error("Maximum lock count exceeded");
// 更新操作
setState(nextc);
return true;
}
return false;
}
// 执行到这里时候会有哪些情况?
// 1.cas 失败了,表示当前线程在抢锁的时候,被别人抢到了
// 2.c>0 且ownerThread != currentThread 表示锁已经被别人抢了,但是获取锁的线程不是当前线程
}
- 如果现在没有锁(state=0)那就去抢锁,这里可以cas失败,被别人抢去了
- 如果锁已经被占用了,判断一下当前线程是不是获取锁线程,是的话,state+1
- 上面如果都没有执行的话,要么在判断state=0抢锁的时候没有抢到,要么就是锁被抢占了,并且自己不是获取锁线程
- addWaiter方法 (将当前线程封装成node入队)
private Node addWaiter(Node mode) {
// Node.EXCLUSIVE
// 构建node,把当前线程封装到对象node中
Node node = new Node(Thread.currentThread(), mode);
// Try the fast path of enq; backup to full enq on failure
// 快速入队
// 获取队尾节点,保存到pred变量中
Node pred = tail;
if (pred != null) {
// 把当前节点的prev指向原来的尾节点
node.prev = pred;
if (compareAndSetTail(pred, node)) {
// 把原来的尾节点的next指向插入节点
pred.next = node;
return node;
}
}
// 什么时候会执行到这里?
// 1. 当前队列是空队列,tail == null (在判断pred != null)
// 2. cas竞争失败
// 完整入队
enq(node);
return node;
}
- 把当前线程封装成node节点
- 执行快速入队操作,首先看一下尾节点是不是空,就是等待队列空不空,如果不空的就cas操作,插入队尾,把当前节点的prev指向原来的tail,原来的tail指向插入节点
- enq方法 (自旋入队)
private Node enq(final Node node) {
// 自旋入队,只有当前node入队成功后,才会跳出循环
for (;;) {
Node t = tail;
// 1.第一种情况下:
// 当前队列是空队列,tail == null,说明当前线程被锁占用,且当前线程,
// 有可能是第一个获取锁失败的线程(当前可能有一批获取锁失败的线程)
if (t == null) { // Must initialize
// 作为当前持锁线程的第一个 后续线程,需要做什么事?
// 1.因为当前持锁的线程,它获取锁的时候,直接tryAcquire成功了,没有向同步队列插入node,所以作为后续需要给它
// 擦屁股
// CAS 成功,说明当前线程成功创建head节点
if (compareAndSetHead(new Node()))
tail = head;
// 注意:这里没有return,会继续for
} else {
// 第一个获取锁失败的线程同时还有再把自己加到tail上 + 其他普通节点的入队方式
//
node.prev = t;
if (compareAndSetTail(t, node)) {
t.next = node;
return t;
}
}
}
}
- 如果上面快速入队失败了,就进入enq自旋入对,第一个持锁线程不会创建head节点(懒加载),所以队列还是空,第二个节点会帮助创建head节点,并且自己进入下一次自旋
- �第二个节点会把自己插入到tail后面,并把tail指向他
- acquireQueued方法 (当前线程没有被park,需要去挂起 唤醒之后的逻辑在哪里? 唤醒之后的逻辑)
// 参数一:node就是当前线程包装出来的node,且当前时刻,已经入队成功了
// 参数二:当前线程抢占资源成功后,设置state值时,会用到
final boolean acquireQueued(final Node node, int arg) {
// true 表示当前线程抢占锁成功,普通情况下,lock早晚会拿到锁
// false 表示失败,需要执行出队的逻辑
boolean failed = true;
try {
// 当前线程是否被中断过
boolean interrupted = false;
// 自旋
for (;;) {
// 什么时候会执行这里??
// 1、第一次进入for循环,在线程尚未被park之前会执行
// 2.线程park之后,被唤醒之后,会重新进入自旋
// 获取当前节点的前置节点
final Node p = node.predecessor();
// 条件一成立:p == head 说明当前节点为head.next节点,head.next节点任何时候都有权利去争取锁
// 条件二:tryAcquire(arg)
// 成立说明:head对应线程已经释放,head.next对应线程,正好获取到锁
// 不成立:说明head对应的线程 还没释放 head.next仍然需要park
if (p == head && tryAcquire(arg)) {
// 拿到锁之后,需要做什么???
// 设置自己为head节点
setHead(node);
// 将上个线程对应的node的next引用设置为null,协助老的head出队
p.next = null; // help GC
// 当前线程获取锁的过程没有异常,返回中断标记
failed = false;
return interrupted;
}
// shouldParkAfterFailedAcquire 这个方法是干嘛的?
// 当前线程获取锁资源失败后,是否需要挂起
// 如果是true 当前线程需要挂起 false 不需要
if (shouldParkAfterFailedAcquire(p, node) &&
// parkAndCheckInterrupt 这个方法什么作用?
// 挂起当前线程,并且唤醒之后,返回当前线程的中断标记(interrupted 唤醒方式:unpark 或者其他线程发起中断信号
parkAndCheckInterrupt())
// 表示当前node对应的线程是被中断信号唤醒的
interrupted = true;
}
} finally {
if (failed)
cancelAcquire(node);
}
}
- �
- shouldParkAfterFailedAcquire
// 参数一:pred 当前线程的前置节点
// 参数二:node 当前线程对应的node
// 返回值:boolean true表示当前线程需要挂起
private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) {
// 获取前置节点的状态
// waitStatus:0 默认状态 new Node()、-1 Signal状态,表示当前节点释放锁之后会唤醒后面的节点、
// >0 表示当前节点是CANCELED状态
int ws = pred.waitStatus;
// 条件成立:表示前置节点 是个可以唤醒当前节点的节点,返回true => parkAndCheckInterrupt park当前线程
if (ws == Node.SIGNAL)
return true;
if (ws > 0) {
// 找爸爸的过程,结束条件是什么?前置节点 waitStatus <= 0
// 就是将双向队列其中cancel节点出队,让新加入的节点连上 SIGNAL节点
do {
node.prev = pred = pred.prev;
} while (pred.waitStatus > 0);
pred.next = node;
} else {
// 当前node前置节点的状态就是0的一种情况
// 将当前线程node的前置节点设置成SIGNAL,表示前置节点释放锁之后要喊醒我
compareAndSetWaitStatus(pred, ws, Node.SIGNAL);
}
return false;
}
- 当前节点的前置节点是 取消状态时,第一来到这个方法时,会越过取消状态的节点,第二次会返回true,然后park
- 当前节点的前置节点是0,当前线程会cas设置前置节点为-1,第二次来到返回true,然后park
shouldParkAfterFailedAcquire 这个方法确保前面的节点状态一定是-1,不管是跨过前面>0的,还是说先把前置节点设置成-1,当这一次return false再进来的时候,会看前置节点是不是-1,然后return true退出
- parkAndCheckInterrupt (park线程,并且在唤醒之后,返回为否为中断唤醒)
�
private final boolean parkAndCheckInterrupt() {
LockSupport.park(this);
return Thread.interrupted();
}
- cancelAcquire (取消指定node参与竞争)
// 取消指定node参与竞争
private void cancelAcquire(Node node) {
// Ignore if node doesn't exist
if (node == null)
return;
node.thread = null;
Node pred = node.prev;
while (pred.waitStatus > 0)
node.prev = pred = pred.prev;
Node predNext = pred.next;
node.waitStatus = Node.CANCELLED;
if (node == tail && compareAndSetTail(node, pred)) {
compareAndSetNext(pred, predNext, null);
} else {
int ws;
if (pred != head &&
((ws = pred.waitStatus) == Node.SIGNAL ||
(ws <= 0 && compareAndSetWaitStatus(pred, ws, Node.SIGNAL))) &&
pred.thread != null) {
Node next = node.next;
if (next != null && next.waitStatus <= 0)
compareAndSetNext(pred, predNext, next);
} else {
unparkSuccessor(node);
}
node.next = node; // help GC
}
}
3.unlock解锁过程
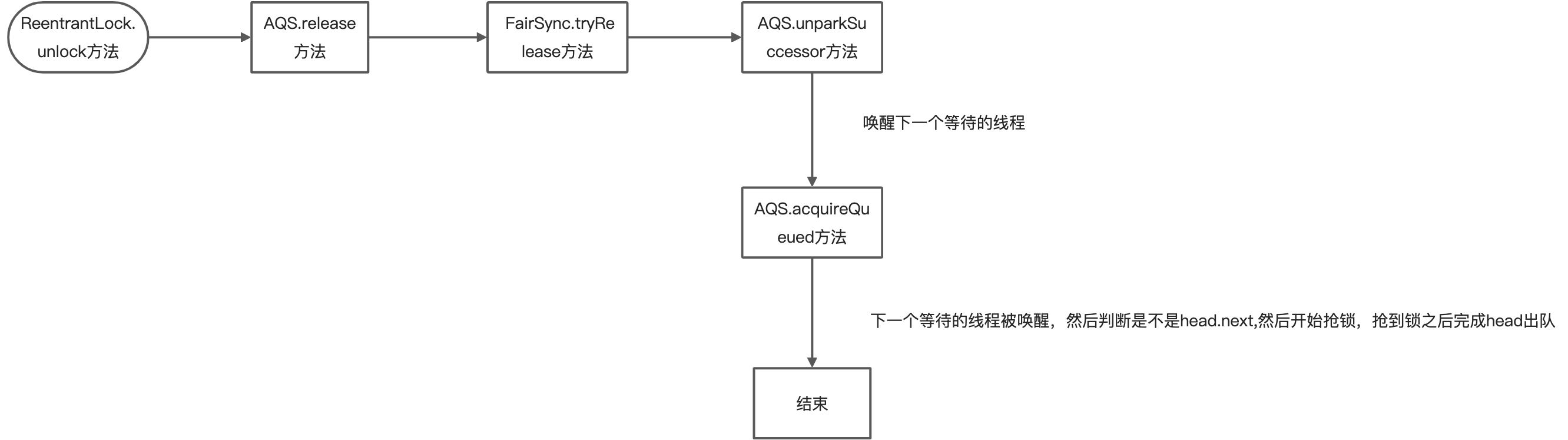
- AQS的release方法
public final boolean release(int arg) {
// 尝试释放锁,tryRelease 返回true,表示当前线程已经完成释放锁
// 返回false,说明当前线程尚未完全释放锁
if (tryRelease(arg)) {
// head节点什么情况下会创建出来?
// 当持锁线程未释放线程时,且持续期间,有其他线程想要获取锁,其他线程发现了锁,而且队列是空队列,此时后续线程会为当前
// 持锁线程构建出一个head节点,并把自己追加到head后面
Node h = head;
// 条件一成立:说明队列中的head节点已经初始化了,ReentrantLock在使用期间,发生过多线程竞争了
// 条件二成立:当前head后面一定插入了node节点
if (h != null && h.waitStatus != 0)
// 唤醒后续节点
unparkSuccessor(h);
return true;
}
return false;
}
- FailSync extends Sync 的tryRelease方法
protected final boolean tryRelease(int releases) {
// 减去释放的值
int c = getState() - releases;
// 条件成立:说明当前线程并未持锁,直接异常...
if (Thread.currentThread() != getExclusiveOwnerThread())
throw new IllegalMonitorStateException();
// 当前线程持有锁
// 是否已经完全释放锁
boolean free = false;
// 条件成立:说明当前线程已经达到完全释放锁的条件,c==0
if (c == 0) {
free = true;
setExclusiveOwnerThread(null);
}
// 更新state的值
setState(c);
return free;
}
- AQS的unparkSuccessor方法
// 唤醒当前节点的下一个节点
private void unparkSuccessor(Node node) {
// 获取当前节点(head)的状态,改成0是因为当前节点已经完成喊后续节点的任务
int ws = node.waitStatus;
// -1 Signal,改成0的原因:因为当前节点已经完成喊后续节点的任务
if (ws < 0)
compareAndSetWaitStatus(node, ws, 0);
// s 是当前节点的第一个后续节点
Node s = node.next;
// 条件一:
// s 什么时候等于null
// 1.当前节点就是tail节点, s==null
// 2.当新节点入队未完成是,(1.设置新节点的prev 指向pred 2.cas设置新节点为tail 3.(未完成)pred.next->新节点)
// 条件二:成立 s.waitStatus >0 前提: s!= null
// 成立:说明 当前node节点的后续节点是 取消状态。。。 需要找一个合适的可以被唤醒的节点
//
if (s == null || s.waitStatus > 0) {
// 查找可以唤醒的节点
s = null;
// 从tail往前到head找一个离head最近的可以唤醒的节点,然后赋值给s
for (Node t = tail; t != null && t != node; t = t.prev)
if (t.waitStatus <= 0)
s = t;
}
// 不管是head的后续节点还是 从tail往前找到离head最近可以唤醒的节点
if (s != null)
LockSupport.unpark(s.thread);
}
- 不过unparkSuccessor这个方法还是没有把head出队,然后被唤醒完的线程又走到如下代码:

被挂起的线程先从parkAndCheckInterrupt中醒来,然后进入外面的自旋,先判断前置节点是不是head,然后又去拿锁,将head至为空,完成head节点的出队操作
4. lockInterruptily 响应中断的加锁
- doAcquireInterruptibly
// 响应中断的获取锁
private void doAcquireInterruptibly(int arg)
throws InterruptedException {
final Node node = addWaiter(Node.EXCLUSIVE);
boolean failed = true;
try {
for (;;) {
final Node p = node.predecessor();
if (p == head && tryAcquire(arg)) {
setHead(node);
p.next = null; // help GC
failed = false;
return;
}
if (shouldParkAfterFailedAcquire(p, node) &&
parkAndCheckInterrupt())
throw new InterruptedException();
}
} finally {
if (failed)
cancelAcquire(node);
}
}
上面parkAndCheckInterrput方法在接受到中断信号的时候, 会抛出InterruptedException,然后跳出方法,最终执行cancelAcquire方法
- cancelAcquire方法 (这一快的逻辑不看了有机会再研究)
// 取消指定node竞争
private void cancelAcquire(Node node) {
// Ignore if node doesn't exist
// 空判断
if (node == null)
return;
// 因为取消排队了,所以node内部的线程置为空
node.thread = null;
// 获取当前排队node的前驱
Node pred = node.prev;
while (pred.waitStatus > 0)
node.prev = pred = pred.prev;
// 拿到前驱的next节点
// 1.当前node
// 2.可能也是cancel状态
Node predNext = pred.next;
// 将当前node状态设置为1.cancel状态
node.waitStatus = Node.CANCELLED;
// 当前取消排队的node所处位置不同,出队的策略是不同的,一共分为三种
// 1.当前node是队尾
// 2.当前node不是head.next也不是tail,
// 3.当前node是head.next节点
// 条件一成立:当前node是队尾,队尾出队
// 条件二成立:compareAndSetTail(node,pred) 成功,说明修改tail成功
if (node == tail && compareAndSetTail(node, pred)) {
// 修改pred.next = null 完成node出队
compareAndSetNext(pred, predNext, null);
} else {
// 保存节点节点状态
int ws;
// 当前node不是head.next也不是tail
if (pred != head &&
((ws = pred.waitStatus) == Node.SIGNAL ||
(ws <= 0 && compareAndSetWaitStatus(pred, ws, Node.SIGNAL))) &&
pred.thread != null) {
Node next = node.next;
if (next != null && next.waitStatus <= 0)
compareAndSetNext(pred, predNext, next);
} else {
unparkSuccessor(node);
}
node.next = node; // help GC
}
}
文章来源:https://blog.csdn.net/LittleStar_Cao/article/details/135541149
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【Linux】基本指令
- Jetson Orin Nano使用OpenCV获取视频帧率和帧数的方法
- Java之File类
- ECMAScript6历史-前端开发+ECMAScript+基础语法+入门教程
- Python基础入门第六节课笔记
- ECMAScript日常总结--ES2020(ES11)
- Linux安装node
- url中有Jsessionid与重写功能
- Python批量读取大量nc格式文件并导出全部时间信息
- 怎么做手机App测试?app测试详细流程和方法介绍!