1W字带你看懂 自动驾驶传感器之毫米波雷达
一直以来,激光雷达因能对周围环境实现3D感知而备受自动驾驶主流者的“宠爱”。不过无论是激光雷达还是摄像头、超声波传感器,都容易受到恶劣天气环境影响导致性能降低甚至失效(恶劣天气环境往往是事故高发的主要原因),因而都存在“致命”缺陷!这众时候,毫米波雷达凭借可穿透尘雾、雨雪、不受恶劣天气影响的绝对优势,且唯一能够“全天候全天时”工作的超能力,成为汽车ADAS不可或缺的核心传感器之一。
现在大家购买汽车基本上,都要有以下的辅助驾驶功能,
1. ACC(自适应巡航)
2. BSD&LCA(盲点监测和变道辅助)
3. AEB(自动紧急制动,通常配合摄像头进行数据融合)
而基本上这些功能都是摄像头同毫米波雷达辅助一起完成的,理论上只有摄像头也可以完成,但是回忆瓶颈,使用毫米波雷达可以让整个系统更加稳定和安全。
什么是雷达。

由于我们大学是气象学院的前身,所以学校里面会非常多雷达接收的天线,大脑里面第一时间想到的就是上图这样的雷达场景,如果车上背这么大一个家伙,根本无法行走,所以我们先来看看雷达的工作原理。
雷达是利用无线电回波以探测目标方向和距离的一种装置,用于无线电探向与测距,全世界开始熟悉雷达是在1940年的不列颠空战中,七百架载有雷达的英国战斗机,击败两千架来袭的德国轰炸机,改写了历史。二战后,雷达开始有许多和平用途。
雷达, 是英文RADAR的音译, 源于Radio Detection and Ranging的缩写, 意思为“无线电探测和测距”,即用无线电的方法发现目标并测定它们的空间位置,这也揭示了雷达最重要任务就是检测与目标物体的距离、速度和方向。
毫米波雷达测距原理很简单,就是把无线电波(毫米波)发出去,然后接收回波,根据收发的时间差测得目标的位置数据和相对距离。根据电磁波的传播速度,可以确定目标的距离公式为:s=ct/2,其中s为目标距离,t为电磁波从雷达发射出去到接收到目标回波的时间,c为光速。
神奇的多普勒原理
毫米波雷达测速和普通雷达一样,都是基于多普勒效应(Dopler Effect)原理。当声音,光和无线电波等振动源与观测者以相对速度相对运动时,观测者所收到的振动频率与振动源所发出的频率有所不同。当发射的电磁波和被探测目标有相对移动、回波的频率会和发射波的频率不同。
当目标向雷达天线靠近时,反射信号频率将高于发射机频率;反之,当目标远离天线而去时,反射信号频率将低于发射机频率。由多普勒效应所形成的频率变化叫做多普勒频移,它与相对速度成正比,与振动频率成反比。
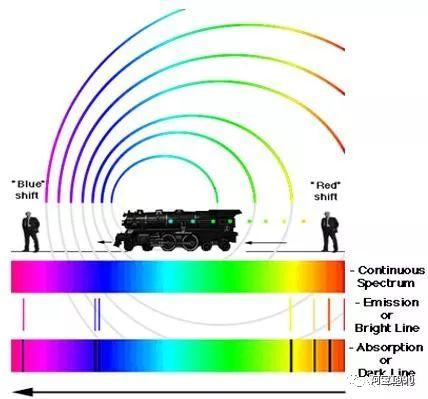
所以,通过检测这个频率差,可以测得目标相对于雷达的移动速度,也就是目标与雷达的相对速度。根据发射脉冲和接收的时间差,可以测出目标的距离。同时用频率过滤方法检测目标的多普勒频率谱线,滤除干扰杂波的谱线,可使雷达从强杂波中分辨出目标信号。所以脉冲多普勒雷达比普通雷达的抗杂波干扰能力强,能探测出隐蔽在背景中的活动目标。
毫米波的频段在哪儿
毫米波(millimeter wave )波长为 1~10 毫米的电磁波称毫米波,它位于微波与远红外波相交叠的波长范围,因而兼有两种波谱的特点。
?
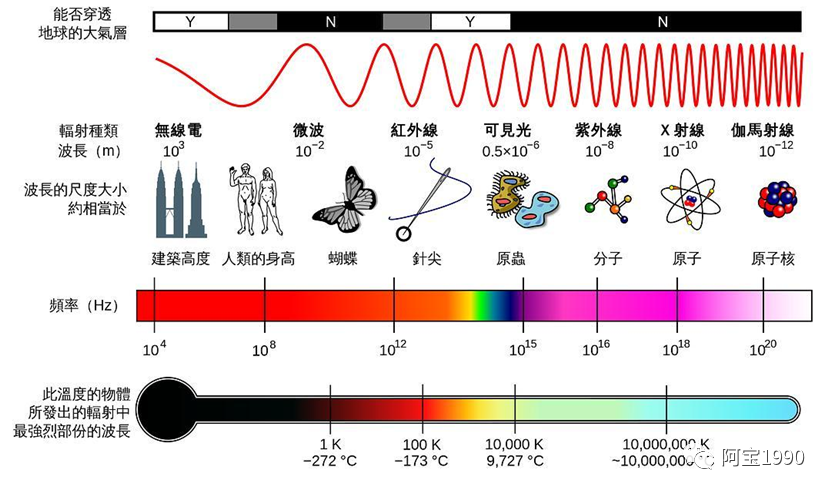
根据波的传播理论,频率越高,波长越短,分辨率越高,穿透能力越强,但在传播过程的损耗也越大,传输距离越短;相对地,频率越低,波长越长,绕射能力越强,传输距离越远。所以与微波相比,毫米波的分辨率高、指向性好、抗干扰能力强和探测性能好。与红外相比,毫米波的大气衰减小、对烟雾灰尘具有更好的穿透性、受天气影响小。这些特质决定了毫米波雷达具有全天时全天候的工作能力。
?
它具有以下主要特点:
?极宽的带宽:通常认为毫米波频率范围为 26.5~300GHz,带宽高达 273.5GHz。超过从直流到微波全部带宽的 10 倍。即使考虑大气吸收,在大气中传播时只能使用四个主要窗口,但这四个窗口的总带宽也可达 135GHz,为微波以下各波段带宽之和的 5 倍。这在频率资源紧张的今天无疑极具吸引力。
?波束窄:在相同天线尺寸下毫米波的波束要比微波的波束窄得多。例如一个 12cm 的天线,在 9.4GHz 时波束宽度为 18 度,而 94GHz 时波速宽度仅 1.8 度。因此可以分辨相距更近的小目标或者更为清晰地观察目标的细节。
?与激光相比:毫米波的传播受气候的影响要小得多,可以认为具有全天候特性。
?和微波相比:毫米波元器件的尺寸要小得多。因此毫米波系统更容易小型化。
大气窗口和毫米波雷达的频段划分
通常大气层中水汽、氧气会对电磁波有吸收作用,目前绝大多数毫米波应用研究集中在几个“大气窗口”频率和三个“衰减峰”频率上。所谓的“大气窗口”是指电磁波通过大气层较少被反射、吸收和散射的那些透射率高的波段。如图3,我们可以看到毫米波传播受到衰减较小的“大气窗口”主要集中在35GHz、45GHz、94GHz、140GHz、220GHz频段附近。而在60GHz、120GHz、180GHz频段附近衰减出现极大值, 即“衰减峰”。一般说来, “大气窗口”频段比较适用于点对点通信,已被低空空地导弹和地基雷达所采用,而“衰减峰”频段被多路分集的隐蔽网络和系统优先选用,用以满足网络安全系数的要求。
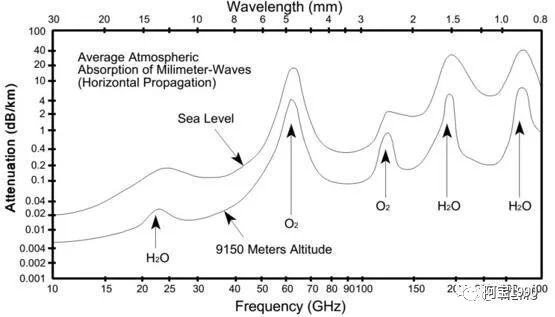
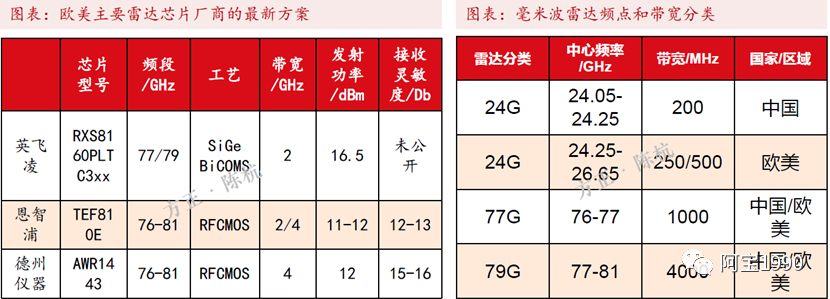
毫米波这个波段频率很高,但是这个频段里很多频率区域的电磁波在空气里传播很容易被水分子、氧气吸收,所以可用的就是几个典型的频段,24、60、77、120GHz。当然24GHz很特别,他严格来讲不是毫米波,因为它的波长在1cm左右。但是它是最早被利用的。现在各个国家把24GHz划出来可以民用,77GHz划分给了汽车防撞雷达,24Ghz也在汽车里用得最早。

24GHz将被更高频代替。由于欧洲电信标准协会和美国联邦通信委员会制定了频谱法规和标准,24GHz的UWB将被淘汰。截至2022年1月1日,24GHz超宽带将不再允许在欧洲和美国用于工业用途。60GHz频段的射频使用不受法规的限制,因此60GHz成为全球工业环境中雷达传感应用的良好替代方案。60GHz的使用将会使得波长变短。由于更长的波长需要更大的天线阵列,但是,当波长变短时,可以使天线阵的尺寸减到最小,从而达到相同的性能。
毫米波雷达发展历程
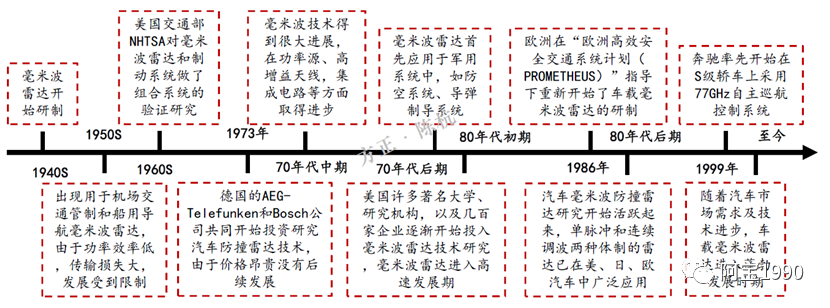
可以看到毫米波雷达在1940年开始研制,真正在汽车上开始研发是1973年,由于价格太昂贵推迟了一段时间,在1986左右开始在汽车上商用,真正在汽车蓬勃发展是在1999年奔驰S级上使用77GHz自主巡航控制系统。
你知道你的倒车雷达是什么类型吗?
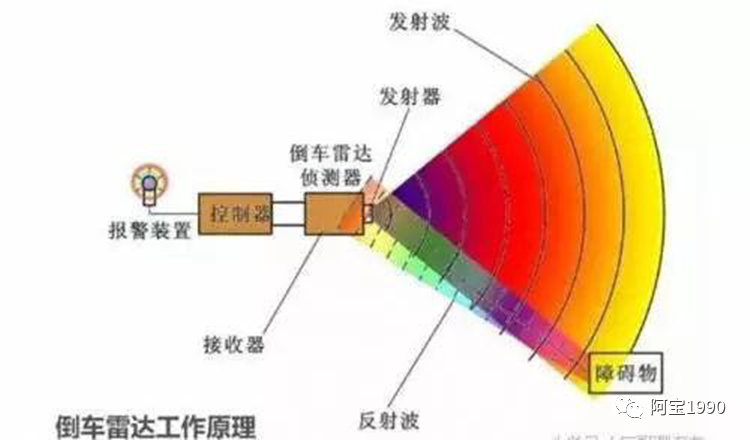
这里简单提一下超声波雷达,在我们倒车时候使用的就是超声波雷达,俗称倒车雷达。在倒车时,超声波倒车雷采用超声波测距原理探测汽车尾部离障碍物的距离,是汽车泊车辅助装置。
原理是这样:
超声波发射器向外面某一个方向发射出超声波信号,在发射超声波时刻的同时开始进行计时,超声波通过空气进行传播,传播途中遇到障碍物就会立即返射传播回来,超声波接收器在收到反射波的时刻就立即停止计时。在空气中超声波的传播速度是340m/s,计时器通过记录时间t,就可以测算出从发射点到障碍物之间的距离长度(s),即:s=340t/2。
超声波的能量消耗较缓慢,在介质中传播的距离比较远,穿透性强,测距的方法简单,成本低。
但是它在速度很高情况下测量距离有一定的局限性,这是因为超声波的传输速度容易受天气情况的影响,在不同的天气情况下,超声波的传输速度不同,而且传播速度较慢,当汽车高速行驶时,使用超声波测距无法跟上汽车的车距实时变化,误差较大。另一方面,超声波散射角大,方向性较差,在测量较远距离的目标时,其回波信号会比较的弱,影响测量精度。但是,在短距离测量中,超声波测距传感器具有非常大的优势。
现在大多数都配置有倒车雷达。
5、毫米波在汽车上的应用
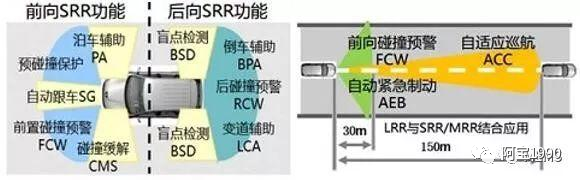
回到毫米波上,如果将它融合在汽车里会有什么帮助?我们先对车载雷达有个直观地认识:

对于车辆安全来说,最主要的判断依据是两车之间的相对距离和相对速度信息。高速行驶中的车辆如果距离过近,则容易造成追尾事故。因此,常用的防撞系统都将对车辆之间的相对距离的测量作为主要的检测任务。

毫米波雷达是通过电磁波束对于目标进行探测。但是毫米波雷达发射功率、探测距离以及天线排布、探测角度之间互相制约。因此毫米波雷达很难具备大角度和远距离的性能,因此汽车领域的毫米波雷达被分为了三类:远距LRR、中距MRR、近距SRR。
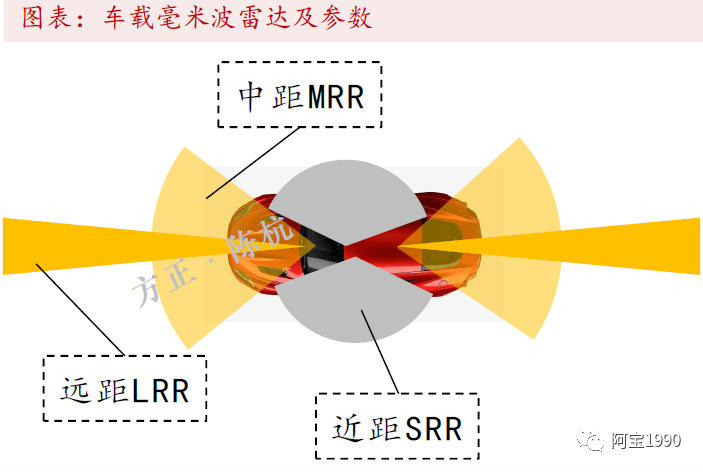

SRR目前价格大约45-60美元一只,MRR大约45美元,LRR大约80-90美元。车载雷达的频率主要分为24GHz频段和77GHz频段,其中77gHz频段代表着未来的趋势:这是国际电信联盟专门划分给车用雷达的频段。严格来说77GHz的雷达才属于毫米波雷达,但是实际上24GHz的雷达也被称为毫米波雷达长距离与中距离毫米波雷达都是77GHz,短距离是24GHz。其中,77GHz 毫米波雷达主要用在车的正前方,用于对中远距离物体的探测,24GHz 毫米波雷达一般被安装在车侧方和后方,用于盲点检测,辅助停车系统等。
车载毫米波雷达中心频率由24GHz提升到了77GHz。由于77GHz相比24GHz具有体积小、容易实现单芯片集成、性能好(更高速度分辨率、提高信噪比、更高输出功率)以及更少研发成本和雷达系统物料成本的优点,77GHz毫米波雷达将成为行业未来发展主要方向。
毫米波雷达需求提升
目前的主流自动驾驶车型中,通常L2级别配备3个24GHz和1个77/79GHz毫米波雷达,L3/L4级别车一般配备4-6个24GHz和2-4个77/79GHz毫米波雷达。
? 完全实现ADAS各项功能一般需要“1长+4中短”5个毫米波雷达。奥迪A8搭载5个毫米波雷达(1LRR+4MRR),奔驰S级搭载6个毫米波雷达(1LRR+6SRR)

6、车载毫米波雷达工作原理
雷达通过天线向外发射毫米波,接收目标反射信号,经后方处理快速准确地获取汽车周围的物理环境信息(如汽车与其他物体之间的相对距离、相对速度、角度、运动方向等),然后根据所探知的物体信息进行目标追踪和识别分类,进而结合车身动态信息进行数据融合,最终通过ECU进行智能处理。经合理决策后,以声、光及触觉等多种方式告知或警告驾驶员,或及时对汽车做出主动干预,从而保证驾驶过程的安全性和舒适性,减少事故发生几率。
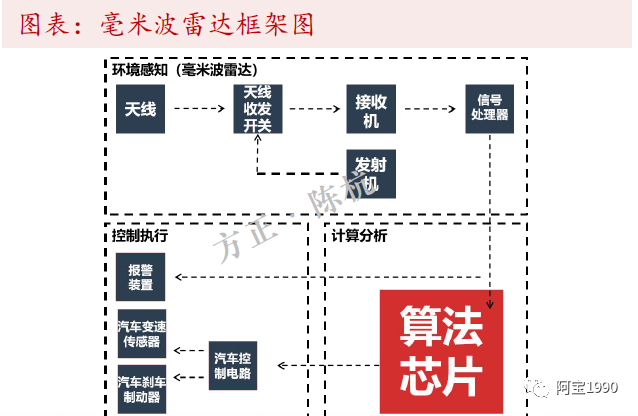
毫米波雷达内部架构:
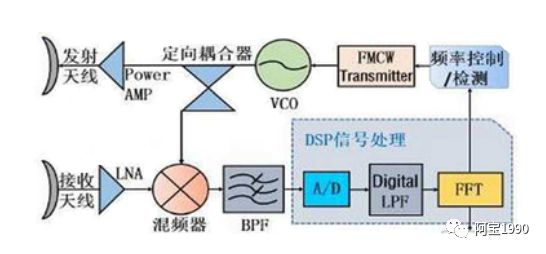
因为有发送和接收信号两部分,信号也是主要从两个部分来走的,一个是接收天线,通过LNA信号放到器,再到混频器,最终进入DSP的信号进行AD采样,然后进行低通滤波,最终傅里叶变换进入MCU。发送信号类似的原理,调制方式这里需要重点注意一下,90%的毫米波雷达都是选择FMCW调制方式。
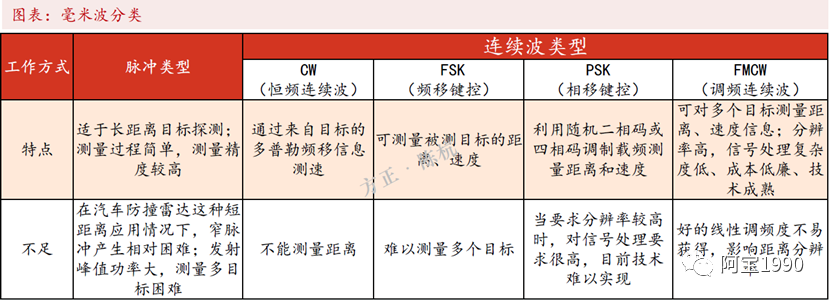
FMCW是主流的毫米波雷达工作方式。根据辐射电磁波方式不同,毫米波雷达主要有脉冲体制以及连续波体制两种工作体制。其中连续波又可以分为FSK(频移键控)、PSK(相移键控)、CW(恒频连续波)、FMCW(调频连续波)等方式。其中FMCW由于检测多个目标、分辨率较高、成本较低,因此大多数Tier 1供应商都选择FMCW。
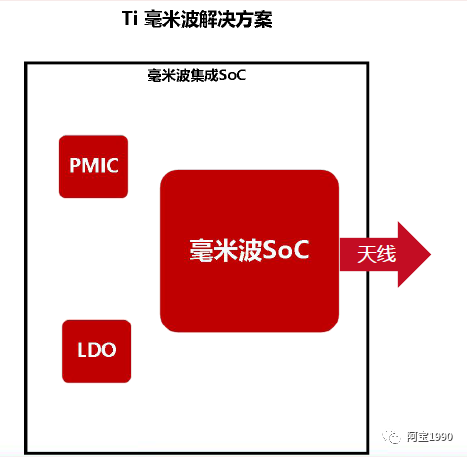
7、毫米波雷达集成方案
毫米波雷达芯片正在逐步走向集成。一个在76-81千兆赫(对应波长约4毫米)工作的毫米波系统,将有能力探测到小于一毫米的移动系统组件的尺寸,也就是相当于要识别出来一个硬币大小尺寸的物体。

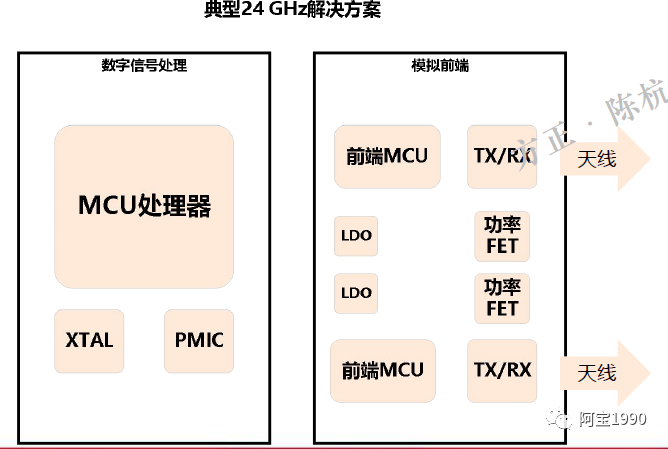
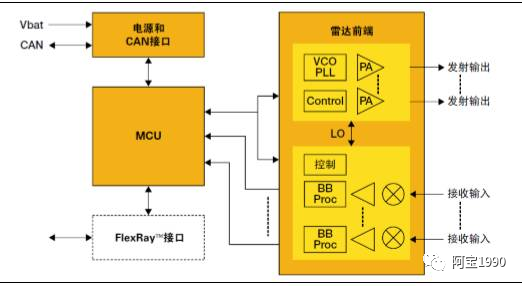
完整的毫米波雷达系统包括发射(TX)和接收(RX)射频(RF)组件;模拟元件,如时钟、模拟-数字转换器(ADC);微控制器(MCUs)和数字信号处理器(dsp)等数字组件。在元件集成封装后,将大幅缩减元器件尺寸。
8、毫米波雷达市场格局
从国外主要毫米波雷达供应商的产品技术参数来看,各公司在毫米波雷达发展上各有不同。博世的毫米波雷达产品主要以76-77GHz为主,产品技术先进,主要包括MRR(中距离)和LRR(远距离)两个系列,其中LLR4产品最大探测距离可以达到250米,在同类产品中处于领先位置
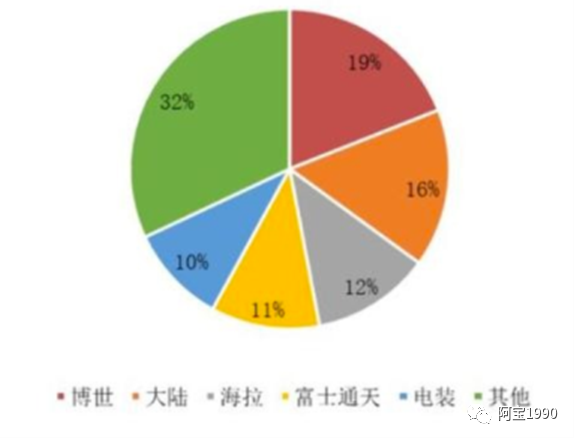
美国、欧洲和日本在车载雷达技术研究方面处于领先地位。现在越来越多的公司和供应商投入到汽车雷达系统研制、器件开发和算法研究当中.从毫米波雷达的产业布局来看,系统目前是被海外的巨头控制着,例如大陆( continental )、 博世( Bosch )、海拉( Hella )、德尔福 ( Delphi )、奥托立夫( Autoliv )等,核心元器件也主要被英飞凌( Infineon )、德州仪器 ( TI )、意法半导体( ST )、亚德诺半导体( ADI )等垄断.相比于国外企业,车载毫米波雷达在国内仍属于起步阶段。
77GHz毫米波雷达技术被垄断于博世、大陆、德尔福、电装、TRW、富士通天、Hitachi等公司手中。
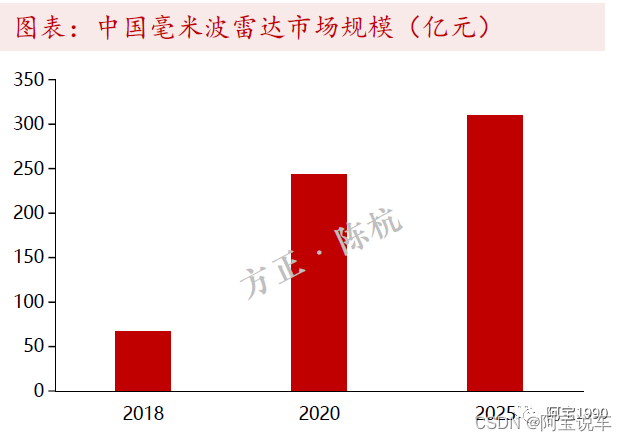
在2025年左右,中国的毫米波雷达市场规模应该在300亿元的规模左右。
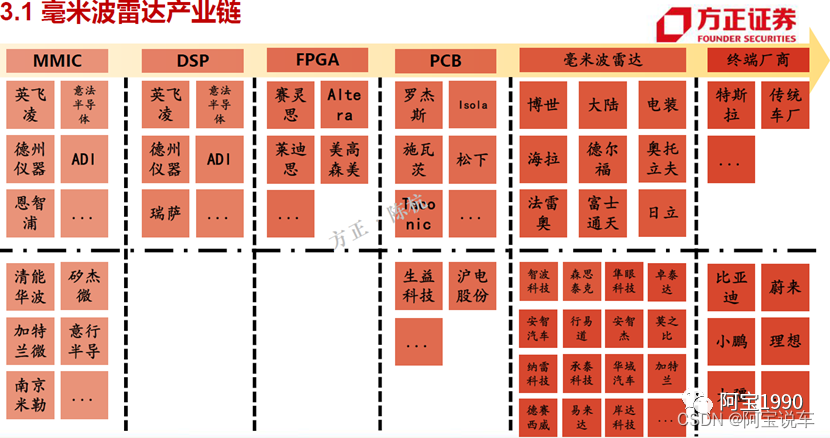
在 24GHz雷达方面,国内少数企业研发已有成果,市场化产品即将问世;但在 77GHz毫米波雷达方面仍属于初级阶段,国内只有极少数企业能做到 77GHz雷达的样机阶段,产业化进程仍待突破。不过,近些年国内创新创业厂商逐渐增长,比如行易道科技、华域汽车、集眼科技、智波科技、森思泰克、衰米波技术、意行半导体、清能华波、矽杰微电子、加特兰微电子等,并实现了部分核心技术的突破,相信打破国外企业垄断的局面指日可待!
9、已开发的车用主动防碰撞毫米波雷达
博世最近发表了采用 SiGe 技术的毫米波雷达 LRR(Long Range Rader)3。此次开发的毫米波雷达由 77GHz 频带的 MMIC(Monolithic Microwave Integrated Circuits)芯片组、4 根贴片天线以及专用 ASIC 构成。芯片组由发送和接收用的两个芯片组成,两芯片均使用了 SiGe 技术。毫米波雷达的可检测距离为 0.5m~250m。检测角度范围在 30m 远处为 30 度。
博世表示通过采用 SiGe 技术,可以比以往采用的 MMIC 技术降低成本。将来有望在车辆上配备两个毫米波雷达,并可追加功能。该公司在车辆前方配备了两个毫米波雷达,并公布了车辆试验结果——检测角度范围在 30m 远处扩大到了 60 度。
与只配备一个毫米波雷达相比,配备两个毫米波雷达提高了急转弯时的检测精度,可以更加准确地捕捉到前方车辆及路边的护栏等。实车试验中,在曲率半径为 35m 的道路上也可准确地识别前方车辆。该公司表示,该装备能够提高低速追踪的 ACC(Adaptive Cruise Control System)的准确度等。另外,将来还可以增加各种功能,比如通过检测路旁的护栏等来识别弯道的形状,与车辆的横摆力矩配合以防止侧滑等。
日立制作所最近开发出两种体积更小的车载毫米波雷达,使用 76GHz 频带,检测距离最长达 200m。
用于进行长距离检测的(检测范围 1m-127m)毫米波雷达,尺寸为横 100mm×纵 80mm×厚 30mm。与原来的机型相比,模块的厚度和体积大约分别减至以来的 1/3 和 1/4。另外,用于进行短距离检测的毫米波雷达(检测范围 0.1m—25m)主要通过改进天线,将检测角度从长距离检测雷达的±15 度扩大到了±35 度。
毫米波雷达主要由天线、高频电路及信号处理部分组成。日立制作所为了减小毫米波雷达的厚度,改进了高频电路及信号处理部分,通过将 MMIC 芯片封装在多层印刷线路板上,减小了体积,与原来使用单层印刷线路板的雷达相比,大幅提高了高频部件的封装密度。在提高微处理器性能的同时,通过增加混载内存的存储容量,将全部处理均集中在了 1 个微处理器上。由于减少了微处理器,所以信号处理部分生产的内部热量也随之减少,从而提高了部件的封装密度,这也为信号处理部分的小型化做出了贡献。
10、毫米波雷达技术发展方向
1.高分辨率
高分辨率一直是毫米波雷达的技术指标,这里有两条技术路线:
1.增加带宽,如76-81GHz,最大带宽可达5GHz。
2.多级联,增加通道数。
在2017年,德州仪器推出了号称全球精度最高单芯片毫米波雷达传感器,也就是工作与76-81GHz的AWR1x和WR1x收发器,然后基于这两片收发器推出了数个76-81GHz毫米波雷达前端,包括AWR124、AWR1443、AWR1642。
2.MIMO
MIMO雷达基本含义:雷达采用多个发射天线,同时发射相互正交的信号,对目标进行照射,再用多个接受天线接收目标回波信号并进行综合处理,提取目标空间位置,运动状态等信息。
3.CMOS RF工艺
毫米波雷达最突出的优势是价格低廉,即便是和视觉系统相比价格也不高。同时毫米波雷达是主动型器件,而视觉系统是被动型器件,主动型器件有比较广阔的挖掘潜力,而被动型器件CMOS图像传感器自问世以来,整体结构未有变化。而收发器从Sige转换为硅基CMOS后,性价比进一步提升。
4. 4D毫米波雷达
一直以来,毫米波雷达都无法实现高密度点云成像,有效地解析目标的轮廓与类别,检测静止目标、较小目标,同时存在分辨率低等性能问题。
因此毫米波雷达被认为是自动驾驶的辅助传感器,在L2以上自动驾驶系统中应用有限。4D高精成像毫米波雷达出现后,将彻底改变这一局面。
4D高精成像技术增加了雷达对目标俯仰高度数据的探测和解析,可实现俯仰角、时间、距离、方位角的信息感知。4D高精成像毫米波增加时间维度信息后可以有效地解析目标的行为、大小轮廓、类别等。这对L2以上的自动驾驶系统内的视觉和昂贵的激光雷达形成最有效的补充,4D高精成像毫米波雷达将成为L2以上自动驾驶的主传感器。?
4D高精成像毫米波雷达通过增加虚拟通道,大幅提升分辨率以及目标检测的置信度和检测范围(如距离和FOV),同时进化出激光雷达一样的高密度点云,可带来丰富的感知增强应用。
在识别较小的物体,对遮挡物体、静止物体和横向移动障碍物的检测,以及应用更多的复杂路况时, 4D高精成像毫米波雷达对视觉和激光雷达提供不能获取的更有价值的路况信息,从而提高系统融合后的安全性。
4D高精成像毫米波雷达在现有雷达优点的基础上,通过四个维度感知环境,提供比传统毫米波雷达更丰富的数据;4D高精成像毫米波雷达进入大规模量产后,成本仅是激光雷达的1/10。因此4D高精成像雷达会成为自动驾驶核心传感器,代替低端激光雷达,并会在未来的自动驾驶方案中占据主导地位,实现低成本,高性能可大规模的量产自动驾驶方案。
变短时,可以使天线阵的尺寸减到最小,从而达到相同的性能。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 力扣86. 分隔链表
- 银河麒麟桌面版开机后网络无法自动链接
- 网络中的权威度量:Neo4j中的Eigenvector Centrality算法
- 自定义SpringBoot项目启动时控制台图标(如来佛祖,永不宕机)
- Canal+RabbitMQ实现MySQL数据同步至ClickHouse
- 浅谈 ret2text
- 回溯算法part02 算法
- CESS 课程开启招募,邀所有开发者共建数据价值网络!
- 研究生英语系列综合教程上
- 常用的sql语句汇总(个人版)