PaddlePaddle飞桨(学习笔记二——Tensor张量)
目录
1、Tensor的创建
1.1指定数据创建
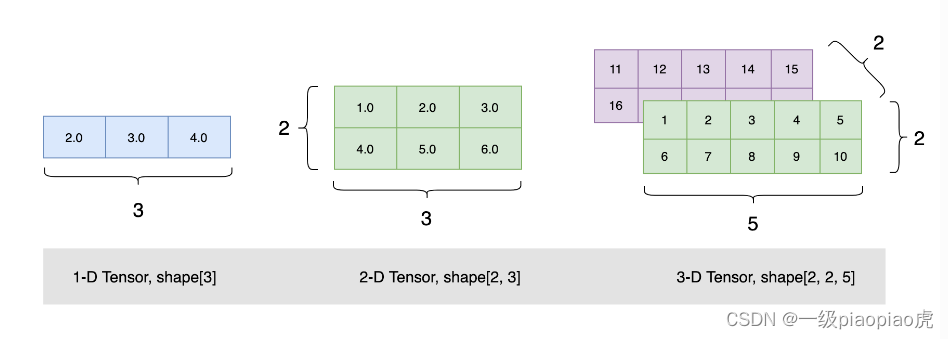
与 Numpy 创建数组方式类似,通过给定 Python 序列(如列表 list、元组 tuple),可使用?paddle.to_tensor?创建任意维度的 Tensor。
#创建一维Tensor
ndim_1_Tensor = paddle.to_tensor([2.0, 3.0, 4.0])
#创建二维Tensor
ndim_2_Tensor = paddle.to_tensor([[1.0, 2.0, 3.0],
[4.0, 5.0, 6.0]])
#创建三维Tensor
ndim_3_Tensor = paddle.to_tensor([[[1, 2, 3, 4, 5],
[6, 7, 8, 9, 10]],
[[11, 12, 13, 14, 15],
[16, 17, 18, 19, 20]]])
?ndim_3_Tensor的输出
Tensor(shape=[2, 2, 5], dtype=int64, place=Place(gpu:0), stop_gradient=True,
[[[1 , 2 , 3 , 4 , 5 ],
[6 , 7 , 8 , 9 , 10]],
[[11, 12, 13, 14, 15],
[16, 17, 18, 19, 20]]])三个张量的可视化?
?
1.2指定形状创建
如果要创建一个指定形状的 Tensor,可以使用?paddle.zeros、paddle.ones、paddle.full?实现。
paddle.zeros([m, n]) # 创建数据全为 0,形状为 [m, n] 的 Tensor
paddle.ones([m, n]) # 创建数据全为 1,形状为 [m, n] 的 Tensor
paddle.full([m, n], 10) # 创建数据全为 10,形状为 [m, n] 的Tensor
paddle.empty(shape=[3, 2]) # 创建数据全为 1,形状为 [3, 2] 的Tensor?
1.3指定区间创建
?如果要在指定区间内创建 Tensor,可以使用paddle.arange、?paddle.linspace?实现。
paddle.arange(start, end, step)
# 创建以步长 step 均匀分隔区间[start, end)的 Tensor
paddle.linspace(start, stop, num)
# 创建以元素个数 num 均匀分隔区间[start, stop)的 Tensor
?
1.4指定对象创建
1.4.1 Tensor对象
- 创建一个与其他 Tensor 具有相同 shape 与 dtype 的 Tensor,可通过?paddle.ones_like?、?paddle.zeros_like?、?paddle.full_like?、paddle.empty_like?实现
- 拷贝并创建一个与其他 Tensor 完全相同的 Tensor,可通过?paddle.clone?实现。
y = paddle.ones_like(x)
y = paddle.clone(x)- 创建一个满足特定分布的 Tensor,如?paddle.rand,?paddle.randn?,?paddle.randint?等。
#服从均匀分布的、范围在[low, high)的随机 Tensor,形状为 shape
out1 = paddle.randint(low=-5, high=5, shape=[2, 3])
#符合均匀分布的、范围在[0, 1)的 Tensor,形状为 shape
out1 = paddle.rand(shape=[2, 3])
#符合标准正态分布的随机 Tensor,形状为 shape
out1 = paddle.randn(shape=[2, 3])- 通过设置随机种子创建 Tensor,可每次生成相同元素值的随机数 Tensor,可通过?paddle.seed?和?paddle.rand?组合实现。
?1.4.2 Image对象
-
对于图像场景,可使用?paddle.vision.transforms.ToTensor?直接将 PIL.Image 格式的数据转为 Tensor,使用?paddle.to_tensor?将图像的标签(Label,通常是 Python 或 Numpy 格式的数据)转为 Tensor。
-
对于文本场景,需将文本数据解码为数字后,再通过?paddle.to_tensor?转为 Tensor。不同文本任务标签形式不一样,有的任务标签也是文本,有的则是数字,均需最终通过 paddle.to_tensor 转为 Tensor。
from PIL import Image
import paddle
import paddle.vision.transforms as T
import paddle.vision.transforms.functional as F
img_arr = ((paddle.rand((4, 5, 3)) * 255.).astype('uint8')).numpy()
fake_img = Image.fromarray(img_arr)
#将形状为 (H x W x C)的输入数据
#PIL.Image 或 numpy.ndarray 转换为 (C x H x W)
transform = T.ToTensor()
tensor = transform(fake_img)
?
1.5自动创建
除了手动创建 Tensor 外,实际在飞桨框架中有一些 API 封装了 Tensor 创建的操作,从而无需用户手动创建 Tensor。
2、Tensor 的属性
2.1 Tensor 的形状(shape)
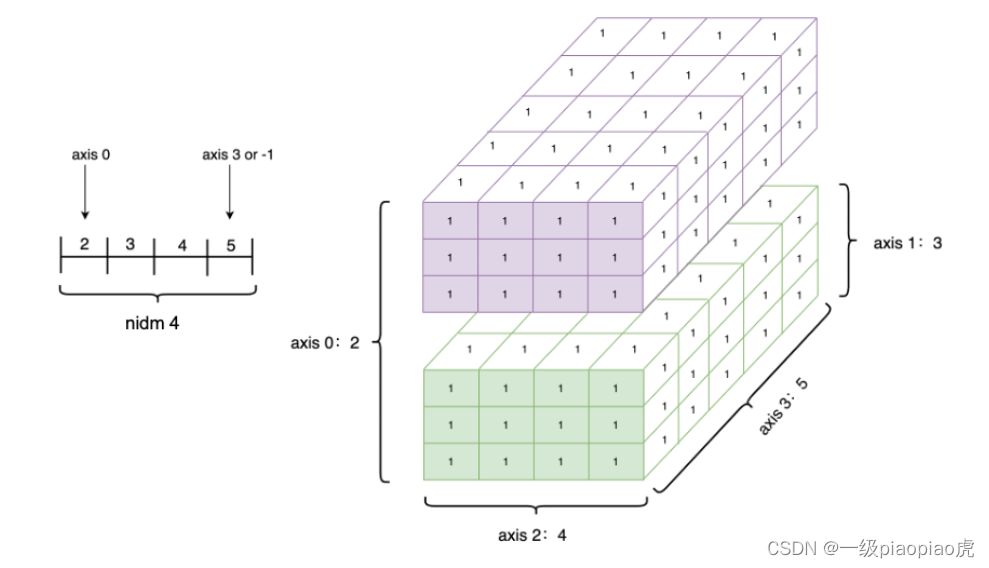
形状是 Tensor 的一个重要的基础属性,可以通过?Tensor.shape?查看一个 Tensor 的形状,以下为相关概念:
-
shape:描述了 Tensor 每个维度上元素的数量。
-
ndim: Tensor 的维度数量,例如向量的维度为 1,矩阵的维度为 2,Tensor 可以有任意数量的维度。
-
axis 或者 dimension:Tensor 的轴,即某个特定的维度。
-
size:Tensor 中全部元素的个数。
ndim_4_Tensor = paddle.ones([2, 3, 4, 5])
print("Data Type of every element:", ndim_4_Tensor.dtype)
print("Number of dimensions:", ndim_4_Tensor.ndim)
print("Shape of Tensor:", ndim_4_Tensor.shape)
print("Elements number along axis 0 of Tensor:", ndim_4_Tensor.shape[0])
print("Elements number along the last axis of Tensor:", ndim_4_Tensor.shape[-1])
?
?重置 Tensor 形状(Reshape) 的方法
在指定新的 shape 时存在一些技巧:
-
-1?表示这个维度的值是从 Tensor 的元素总数和剩余维度自动推断出来的。因此,有且只有一个维度可以被设置为 -1。 -
0?表示该维度的元素数量与原值相同,因此 shape 中 0 的索引值必须小于 Tensor 的维度(索引值从 0 开始计,如第 1 维的索引值是 0,第二维的索引值是 1)。
x = paddle.to_tensor([1, 2, 3])
y = paddle.reshape(x, [1, 3])
origin:[3, 2, 5] reshape:[3, 10] actual: [3, 10]
# 直接指定目标 shape
origin:[3, 2, 5] reshape:[-1] actual: [30]
# 转换为 1 维,维度根据元素总数推断出来是 3*2*5=30
origin:[3, 2, 5] reshape:[-1, 5] actual: [6, 5]
# 转换为 2 维,固定一个维度 5,另一个维度根据元素总数推断出来是 30÷5=6
origin:[3, 2, 5] reshape:[0, -1] actual: [3, 10]
# reshape:[0, -1]中 0 的索引值为 0,按照规则,转换后第 0 维的元素数量与
#原始 Tensor 第 0 维的元素数量相同,为 3;第 1 维的元素数量根据元素总值
#计算得出为 30÷3=10。
origin:[3, 2] reshape:[3, 1, 0] error:
# reshape:[3, 1, 0]中 0 的索引值为 2,但原 Tensor 只有 2 维,无法找到与
#第 3 维对应的元素数量,因此出错。
说明:
除了 paddle.reshape 可重置 Tensor 的形状,还可通过如下方法改变 shape:
-
paddle.squeeze,可实现 Tensor 的降维操作,即把 Tensor 中尺寸为 1 的维度删除。
-
paddle.unsqueeze,可实现 Tensor 的升维操作,即向 Tensor 中某个位置插入尺寸为 1 的维度。
-
paddle.flatten,将 Tensor 的数据在指定的连续维度上展平。
-
paddle.transpose,对 Tensor 的数据进行重排。
原位(Inplace)操作和非原位操作的区别
飞桨框架的 API 有原位(Inplace)操作和非原位操作之分,原位操作即在原 Tensor 上保存操作结果,输出 Tensor 将与输入 Tensor 共享数据,并且没有 Tensor 数据拷贝的过程。非原位操作则不会修改原 Tensor,而是返回一个新的 Tensor。通过 API 名称区分两者,如?paddle.reshape?是非原位操作,paddle.reshape_?是原位操作。
2.2 Tensor 的数据类型(dtype)
Tensor 的数据类型 dtype 可以通过?Tensor.dtype?查看,支持类型包括:bool、float16、float32、float64、uint8、int8、int16、int32、int64、complex64、complex128。
同一 Tensor 中所有元素的数据类型均相同,通常通过如下方式指定:
-
通过给定 Python 序列创建的 Tensor,可直接使用 dtype 参数指定。如果未指定:
-
对于 Python 整型数据,默认会创建?
int64?型 Tensor; -
对于 Python 浮点型数据,默认会创建?
float32?型 Tensor,并且可以通过?paddle.set_default_dtype?来调整浮点型数据的默认类型。
-
修改数据类型的方法
飞桨框架提供了paddle.cast?接口来改变 Tensor 的 dtype:
float64_Tensor = paddle.cast(float32_Tensor, dtype='float64')2.3 Tensor 的设备位置(place)
#创建 CPU 上的 Tensor
cpu_Tensor = paddle.to_tensor(1, place=paddle.CPUPlace())
print(cpu_Tensor.place)
#创建 GPU 上的 Tensor
gpu_Tensor = paddle.to_tensor(1, place=paddle.CUDAPlace(0))
print(gpu_Tensor.place) # 显示 Tensor 位于 GPU 设备的第 0 张显卡上
#创建固定内存上的 Tensor
pin_memory_Tensor = paddle.to_tensor(1, place=paddle.CUDAPinnedPlace())
print(pin_memory_Tensor.place)2.4 Tensor 的名称(name)
print("Tensor name:", paddle.to_tensor(1).name)3、Tensor 的操作
3.1 索引和切片
通过索引或切片方式可访问或修改 Tensor。飞桨框架使用标准的 Python 索引规则与 Numpy 索引规则,与?Indexing a list or a string in Python?类似。具有以下特点:
-
基于 0-n 的下标进行索引,如果下标为负数,则从尾部开始计算。
-
通过冒号?
:?分隔切片参数,start:stop:step?来进行切片操作,其中 start、stop、step 均可缺省。
3.2 赋值与修改
请慎重通过索引或切片修改 Tensor,该操作会原地修改该 Tensor 的数值,且原值不会被保存。如果被修改的 Tensor 参与梯度计算,仅会使用修改后的数值,这可能会给梯度计算引入风险。飞桨框架会自动检测不当的原位(inplace)使用并报错。
import numpy as np
x = paddle.to_tensor(np.ones((2, 3)).astype(np.float32)) # [[1., 1., 1.], [1., 1., 1.]]
x[0] = 0 # x : [[0., 0., 0.], [1., 1., 1.]]
x[0:1] = 2.1 # x : [[2.09999990, 2.09999990, 2.09999990], [1., 1., 1.]]
x[...] = 3 # x : [[3., 3., 3.], [3., 3., 3.]]
x[0:1] = np.array([1,2,3]) # x : [[1., 2., 3.], [3., 3., 3.]]
x[1] = paddle.ones([3]) # x : [[1., 2., 3.], [1., 1., 1.]]
3.3Tensor广播
飞桨 Tensor 的广播机制主要遵循如下规则(参考?Numpy 广播机制):
-
每个 Tensor 至少为一维 Tensor。
-
从最后一个维度向前开始比较两个 Tensor 的形状,需要满足如下条件才能进行广播:两个 Tensor 的维度大小相等;或者其中一个 Tensor 的维度等于 1;或者其中一个 Tensor 的维度不存在。
# 可以广播的例子 2
x = paddle.ones((2, 3, 1, 5))
y = paddle.ones((3, 4, 1))
# 从最后一个维度向前依次比较:
# 第一次:y 的维度大小是 1
# 第二次:x 的维度大小是 1
# 第三次:x 和 y 的维度大小相等
# 第四次:y 的维度不存在
# 所以 x 和 y 是可以广播的
z = x + y
print(z.shape)
# [2, 3, 4, 5]
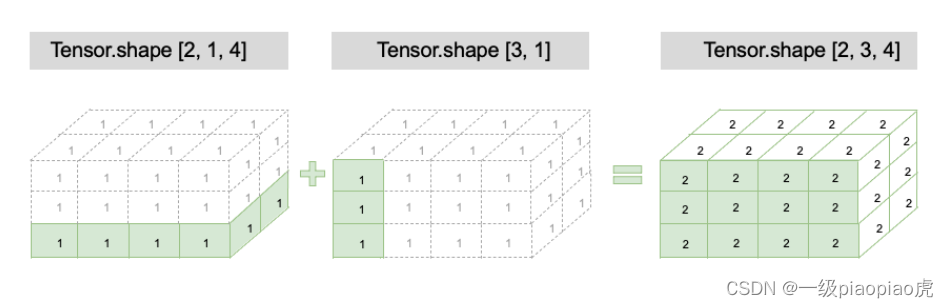
在了解两个 Tensor 在什么情况下可以广播的规则后,两个 Tensor 进行广播后的结果 Tensor 的形状计算规则如下:
-
如果两个 Tensor 的形状的长度不一致,会在较小长度的形状矩阵前部添加 1,直到两个 Tensor 的形状长度相等。
-
保证两个 Tensor 形状相等之后,每个维度上的结果维度就是当前维度上的较大值。
举例如下:
x = paddle.ones((2, 1, 4))
y = paddle.ones((3, 1)) # y 的形状长度为 2,小于 x 的形状长度 3,因此会在 y 的形状前部添加 1,结果就是 y 的形状变为[1, 3, 1]
z = x + y
print(z.shape)
# z 的形状: [2,3,4],z 的每一维度上的尺寸,将取 x 和 y 对应维度上尺寸的较大值,如第 0 维 x 的尺寸为 2,y 的尺寸为 1,则 z 的第 0 维尺寸为 2
?
3.4Tensor运算
x.abs() #逐元素取绝对值
x.ceil() #逐元素向上取整
x.floor() #逐元素向下取整
x.round() #逐元素四舍五入
x.exp() #逐元素计算自然常数为底的指数
x.log() #逐元素计算 x 的自然对数
x.reciprocal() #逐元素求倒数
x.square() #逐元素计算平方
x.sqrt() #逐元素计算平方根
x.sin() #逐元素计算正弦
x.cos() #逐元素计算余弦
x.add(y) #逐元素相加
x.subtract(y) #逐元素相减
x.multiply(y) #逐元素相乘
x.divide(y) #逐元素相除
x.mod(y) #逐元素相除并取余
x.pow(y) #逐元素幂运算
x.max() #指定维度上元素最大值,默认为全部维度
x.min() #指定维度上元素最小值,默认为全部维度
x.prod() #指定维度上元素累乘,默认为全部维度
x.sum() #指定维度上元素的和,默认为全部维度
x + y -> x.add(y) #逐元素相加
x - y -> x.subtract(y) #逐元素相减
x * y -> x.multiply(y) #逐元素相乘
x / y -> x.divide(y) #逐元素相除
x % y -> x.mod(y) #逐元素相除并取余
x ** y -> x.pow(y) #逐元素幂运算
x.isfinite()
#判断 Tensor 中元素是否是有限的数字,即不包括 inf 与 nan
x.equal_all(y)
#判断两个 Tensor 的全部元素是否相等,并返回形状为[]的布尔类 0-D Tensor
x.equal(y)
#判断两个 Tensor 的每个元素是否相等,并返回形状相同的布尔类 Tensor
x.not_equal(y)
#判断两个 Tensor 的每个元素是否不相等
x.less_than(y)
#判断 Tensor x 的元素是否小于 Tensor y 的对应元素
x.less_equal(y)
#判断 Tensor x 的元素是否小于或等于 Tensor y 的对应元素
x.greater_than(y)
#判断 Tensor x 的元素是否大于 Tensor y 的对应元素
x.greater_equal(y)
#判断 Tensor x 的元素是否大于或等于 Tensor y 的对应元素
x.allclose(y)
#判断 Tensor x 的全部元素是否与 Tensor y 的全部元素接近,并返回形状为[]的布尔类 0-D Tensor
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- K8s-Pod资源(二)node调度策略、node亲和性、污点与容忍度
- JavaScript基础(26)_dom增删改练习
- C++ 之LeetCode刷题记录(九)
- python 字典的基础及应用
- 【Docker】数据管理之数据卷的挂载
- C++使用HTTP库和框架轻松发送HTTP请求
- java 企业工程管理系统软件源码 自主研发 工程行业适用
- uniapp打包后安装提示此安装包为32位架构
- Express中使用Swagger
- C2855 命令行选项“/Zc:referenceBinding“与预编译头不一致和C2855 命令行选项“/Zc:__cplusplus“与预编译头不一致