分辨率、精度和公差之间的关系
视觉行业的初学者,甚至是做了1~2年的销售也许还会困惑这样的事情——在拿到检测要求后,不知道根据图纸上的公差,应该选用多少万像素的相机。同时还不明确为什么要三个类似的专有名词来描述同一个事情。
这一期内容就是为了讲明白这一件事情: 分辨率,精度,公差的关系 。从而指导相机的选型。
一. 分辨率(Resolution)
「分辨率」,又称解析度、解像度,可以细分为屏幕分辨率、图像分辨率、打印分辨率和扫描分辨率等。它决定了图像的精细程度,通常表示成每英寸像素(Pixel per inch, ppi)和每英寸点(Dot per inch, dpi),从技术角度说,“像素”(p)只存在于计算机显示领域,而“点”(d)只出现于打印或印刷领域。 摘抄:知乎:分辨率和像素是什么关系?
1、工业相机的分辨率是如何定义的?
区别与上面介绍的分辨率,我们这里所介绍的是「工业相机的分辨率」,它由工业相机所采用的芯片分辨率决定,是芯片靶面排列的像元数量,即表示相机每次采集图像的像素点数(Pixels),下面以Basler acA2440-75um型号的相机为例:

图中相机芯片的水平/垂直分辨率指的是相机采集到的图像水平方向有2448个像素,垂直方向有2048个像素,那么相机的分辨率为2448(px)×2048(px),得到相机的分辨率为500w像素
(5MP) 知识拓展:相机的总像素和有效像素
现在市场上的工业相机像素标识大部分是相机的「总像素」而不是「有效像素」。「总像素」就指的是相机的CCD或CMOS感光芯片出厂时靶面排列的像元总数(是相机理论上所能达到的最大像素)。「有效像素」是指相机拍摄过程中那些用来感光成像的像素。很多情况下,相机CCD或CMOS感光芯片中有一部分像素是并不参与感光成像的(有用来降噪的、用来做全黑的这部分像素),所以有效像素要低于总像素(最大像素)。上图中的分辨率5MP指的是相机的总像素而不是有效像素。
2、工业相机的分辨率是如何选择的?
拿到一个项目,我们首先需要确定的两个指标就是:
相机视野: 通过实际检测物体的大小去确定相机的视野大小;
像素精度: 客户有明确要求(指的是图像上的像素实际大小);
上面两项指标确定之后,通过公式可求出该选用多大分辨率的相机:
分辨率(Pixel) = { 相机视野(mm)}÷ { 像素精度(mm /Pixel)}
分辨率(Pixel)=相机视野(mm)÷像素精度(mm/Pixel)
比如,产品规格是20mm×20mm大小,要求像素精度0.014mm/pix,那么我选择的相机视野可以是28mm×28mm,通过28mm÷14μm/pix = 2000pix。可以选用500w分辨率的相机(2448×2048)。
二. 精度(Accuracy)
1、像素精度(Pixel Accuracy)
通过上面选择多大分辨率的相机时,我们使用到了「像素精度」,它表示一个像素在真实世界代表的距离,即一个像素的实际物理尺寸,和分辨率的关系如下:
像素精度(mm/pix) = { 相机视野(mm)}÷ { 分辨率(pixel) }
像素精度(mm/pix)=相机视野(mm)÷分辨率(pixel)
ps:这里计算的像素精度使用的分辨率是相机上标识的分辨率计算的,也就是上面相机参数图中的水平/垂直分辨率:2448×2048。如果用上面要求的像素精度值0.014mm/pix当做测量精度值,肯定不准确,因为一个像素在大多数情况下无法代表被测物特征。
如下图所示,我们用相机拍摄到一条看似“黑白分明”的边缘,那么这条边是否就是最真实的边缘呢?往往把图像放大并仔细观察就可以发现,“边缘”其实是由一些过渡的像素组成,也就是通常我们说的”边缘”很糊
果光源和结构的比较良好,成像质量比较高,成像比较“锐利”,那么“边缘”就更接近真实边缘;反之,如果成像不好,受帧率、曝光、增益以及其它因素影响,找到的“边缘”可能和真实边缘相差很多个像素。
知识拓展:图像像素精度和芯片像元尺寸的关系
「像素精度」由视野大小和相机分辨率决定的。视野一定,相机分辨率越大,像素精度越小,那么检测精度会越高。
「像元尺寸」由感光芯片大小和相机分辨率决定的。相机分辨率一定,感光芯片越大,像元尺寸越大,单位像元受光面积越大,采集的光信号越多,转为电信号时抗干扰性越好,图像噪点越少。
2、定位精度和重复定位精度(Repeat Precision)
👤 定位精度:指的是你的机器设备停止时,实际到达的位置,和你要求到达位置的误差;
👤 重复定位精度:指的是同一个位置,多次定位过去产生的误差。
重复定位精度比定位精度要大得多,一般是2~3倍,最多不超过10倍。它介于定位精度和像素精度(分辨率)之间。一般在项目评估时,我习惯将定位精度按照1/6或1/8个像素精度来计算,重复定位精度按照1/3或1/4个像素精度来计算。
重复定位精度越高表明系统定位产品的稳定性越强,反之稳定性越差。获取重复定位精度需要相机重复多次地完成同一变化过程所对应测量结果的最大偏差值。
以向靶子上射箭为例,中心是10环。在相同条件下,有ABC三个人练习射击,射击结果如下图所示:
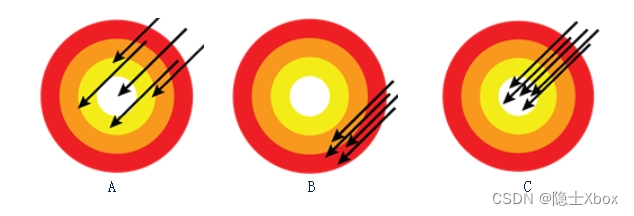
看图可知:
A的射击结果波动很大,但是离10环相差较近;B的射击结果波动很小,但是离10环相差很大。如果我们把这两人分别看作 两种视觉系统,那么A的精度相对较高,但是重复精度差;B的精度差,但是重复精度高。
而最好的结果则是C,就是重复精度高、精度也高,但是大部分时候我们无法得到C那样的结果。那么如果相同的条件下,只能得到A或B这样的结果,我们应该怎么去取舍呢?
对于射手B的结果而言,如果我们把最终的射击区域整体向左上角移动,当区域中心移动到靶心位置时,B的结果就会非常接近C。

类似的情形是,战争时期优秀的炮手在第一发炮弹射击后,会依据弹着点的实际偏离情况(固定差值)和自身经验(重复精度)对弹道做一个固定值的补偿修正计算,在接下来的射击中能确保大多数炮弹击中预定
那么在视觉检测中,可能因为材质或机构安装导致一些相对固定的数据差异,我们可以通过对含有准确数据的标准品(如:经过三次元测量的产品)进行检测,对检测结果中的固定差异进行补偿,来让“射击区域”转移到靶心的位置。
而对于射手A的结果,无论如何调整靶心位置,都无法从根本上解决因重复精度太差导致的数据误差。
由此可见,对于工业视觉检测而言,重复定位精度更为重要。
三. 公差(Tolerance)
在机器视觉检测中,一般情况下,相机的「像素精度」和「公差」之间关系的两种常规评估策略(像素精度:0.014mm/pix):
👤 外观检测:检测精度 = 4倍像素精度,即:检测精度可达0.056mm(±0.028mm)—— 最小可检测的瑕疵或者污点大小为0.056mm。
👤 尺寸测量:测量精度 = 10倍像素精度,即:测量精度可达0.14mm(±0.007mm);
对一个项目来讲,我们是先从图纸上读到公差(检测精度)的要求。然后再根据上述关系,反推得出我们需要多少像素的相机。
条件:Field of View × 30mm
四. 课后作业( Post-Class Exercises)
项目要求: 相机视野20mm*20mm、污点检测误差正负0.015mm。 需要选择多大分辨率的相机?
① 污点检测误差正负0.015mm——》检测精度可达0.03mm
② 由外观检测精度 = 4 × 像素精度,选择的相机像素精度为:0.03mm ÷ 4 = 0.0075mm/pix
③ 通过20mm ÷ 0.0075mm/pix = 267pix,即相机的分辨率应满足 267pix × 267pix = 713万像素。当然,实际测量或检测时需要考虑的还有很多,例如帧率、曝光、增益等。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!