车辆 | 平行泊车路径规划碰撞约束及可行驶区域公式推导
发布时间:2024年01月23日
注:本文推导参考网上论文并加上了一些自己的理解,侵权删。
一、碰撞约束:
需要先计算D 点(D 点为第一段圆弧路径的终点)位置,再根据?D 点计算C 点范围区域。

其中:Lp为车位长度,最小安全距离d1,w为车辆宽度
D点坐标:
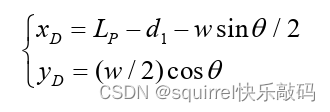
根据得到 D 点位置,以此时的 D 点计算C 点范围区域。
1、泊车时P1点进行碰撞
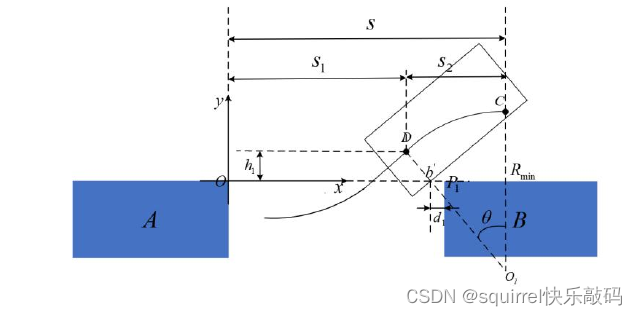
其中:Rmin为最小转弯半径(在文章:阿克曼转向原理及公式推导里有推过Rmin)
C 点下限值坐标为:

又因为h1为D点的纵坐标,S1为D点的纵坐标,将其代入上式即可。
2、车辆与道路边界发生碰撞。

其中:Lroad为道路宽度,l 为车辆轴长,lr 、lf分别为车辆后悬和前悬长度,R 为车辆左上顶点a 的旋转半径值
C 点上限值坐标为:

其中:R1车辆位于此位置时的转弯半径。
此时的R1?需满足:


二、车辆平行泊车起始区域:
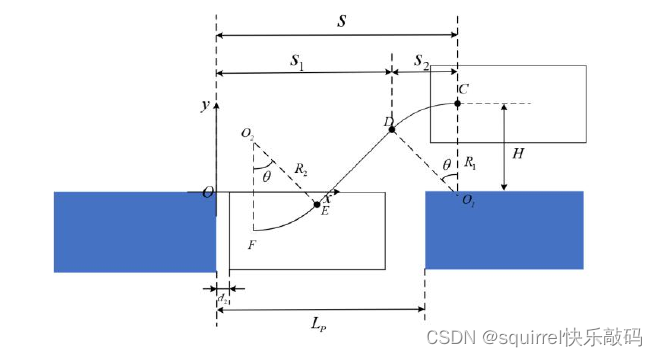
根据泊车路线最短的优化考虑,并且便于计算,本文将R2设计为车辆后轴中心的最小转弯半径Rmin
?E 点车辆的航向角为θ?,直线段路径 EF 的斜率为 tanθ?,那么车辆起始点C 点的选取范围线段与直线 EF 平行,其斜率也为 tanθ.
因 C 点 的 选 取 范 围 线 段 与 直 线 DE 平 行 , 其 斜 率 为 tanθ,即:

如下图示意:

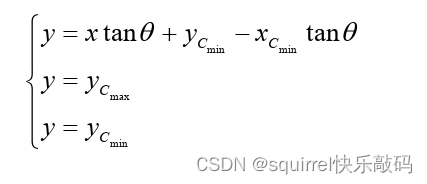
即当车辆位于阴影部分区域时,均可根据所规划的路径进入车位内。则平行泊车起始区域为三条曲线组成的区域,这三条曲线表达式分别为:
文章来源:https://blog.csdn.net/m0_62976848/article/details/135793890
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Python初学者须知(6)实践——创建一个具有基础功能的计算器和创建一个简单的填词游戏
- jsonhandle 插件下载
- setFirstResult ,setMaxResults
- 小程序商城活动页面怎么生成二维码
- C语言经典算法之冒泡排序算法
- word中插入算法的伪代码
- MyBatis源码分析(一):搭建调试环境
- 亚马逊云科技Amazon Q,一款基于生成式人工智能的新型助手
- Qt搭建MQTT编程环境
- 【踩坑】JDK1.8 AudioSystem 无法关闭流的问题