BetaFlight开源代码之电压校准
发布时间:2024年01月07日
1. 源由
既然复杂的BetaFlight开源代码之电流校准都过了一遍,电压相对来说是比较简单的,一起过一下
2. 分析数据流
电源==路径1==》采样电路==路径2==》ADC==路径3==》MCU==路径4==》地面站/OSD
上述任何一个位置和路径都可能发生问题,导致电压不准。
- 电源问题,比如:测试电压源不准(设备异常)
- 路径1问题
- 采样电路问题,比如:采样芯片周边器件阻抗精度衰减
- 路径2问题,比如:信号干扰
- ADC/路径3/MCU问题,比如:代码异常
- 路径4问题,比如:协议格式不匹配
- 地面站/OSD问题:比如:代码异常
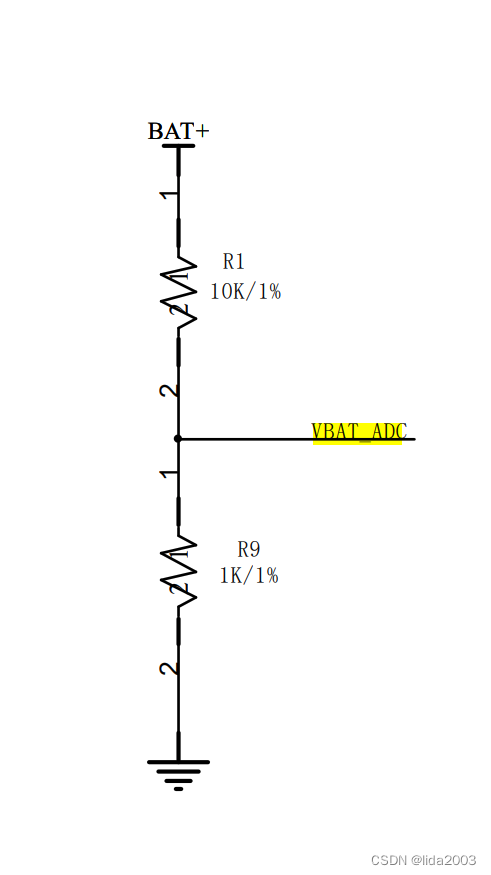
3. 采样电路
VBAT_ADC直接接MCU引脚进行ADC转换形成12bit ADC数据,供后续算法处理。
3. 原理
- inav/betaflight/ardupilot在电压传感器方面的校准方法大致是相同的,采用的是线性拟合: y = a x + b y = ax + b y=ax+b
- betaflight内部公式:
Y
=
(
(
s
r
c
?
s
c
a
l
e
?
g
e
t
V
r
e
f
M
v
(
)
/
10
+
(
0
x
F
F
F
?
5
)
)
/
(
0
x
F
F
F
?
d
i
v
i
d
e
r
)
)
/
m
u
l
t
i
p
l
i
e
r
Y = ((src *scale * getVrefMv() / 10 + (0xFFF * 5)) / (0xFFF * divider)) / multiplier
Y=((src?scale?getVrefMv()/10+(0xFFF?5))/(0xFFF?divider))/multiplier
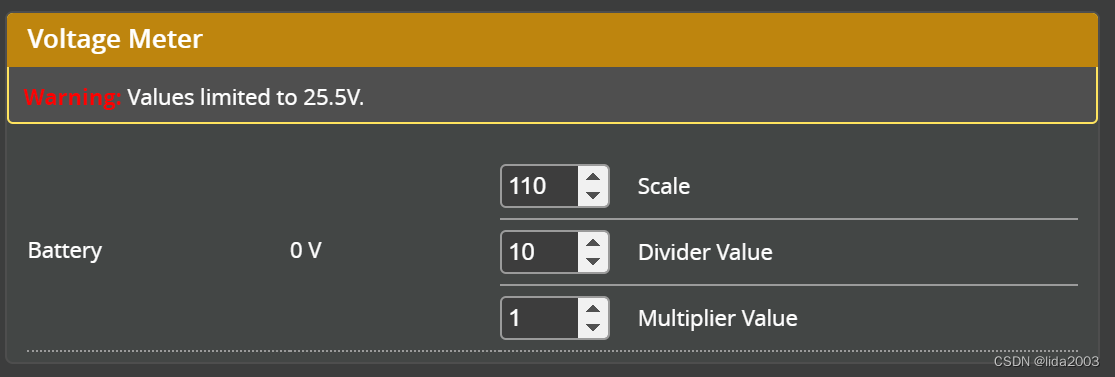
注:STM32在计算时,运用了一些整形变换,使得上述运算不用到浮点指令,减少MCU的工作量。 - betaflight电压计地面站界面
基于上面的电路,大家确实不需要调整太多,只要硬件厂商采用上述10:1的分压电路进行设计。如果您希望自己校准,也未尝不可,校准需要用硬件测试电压。
4. 示例
测试注意事项:
- 建议测试2点以上数据:3S(12.6)、4S(16.8)等等
- 设置
scale=110,divider=10,multiplier=1测试多点电压数据:地面站电压数据(GSVlotage),万用表电压数据(MeterVoltage); - 当
multiplier=1时,计算就比较简单。
A = s c a l e / ( 10 ? m u l t i p l i e r ? ( 4095 + d i v i d e r ) ) A=scale/(10*multiplier*(4095+divider)) A=scale/(10?multiplier?(4095+divider))
B = ( 4095 ? 5 ) / ( m u l t i p l i e r ? ( 4095 + d i v i d e r ) ) B=(4095*5)/(multiplier*(4095+divider)) B=(4095?5)/(multiplier?(4095+divider)) - 通过工具Linear regression calculator进行拟合;
- 计算出
scale,divider值,并填入betaflight地面站配置参数栏位
5. 实测&转换数据
这里就懒惰了点,数据量比较少,所以感觉不出拟合的效果,感兴趣的朋友可以多做几个数据点。

6. 参考资料
【1】BetaFlight开源代码框架简介
【2】BetaFlight深入传感设计:传感模块设计框架
【3】BetaFlight开源代码之电流校准
【4】BetaFlight模块设计之三:芯片温度&参考电压和电池监测模块分析
文章来源:https://blog.csdn.net/lida2003/article/details/135436183
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 现阶段鸿蒙开发薪资高于传统开发岗位的30%~50%
- 探索自动化测试断言:提升测试效率与质量的关键!
- IS-IS原理与配置2
- 【数据结构入门精讲 | 第二篇】考研408、企业面试基础概念习题
- 上门按摩系统的开发对于按摩行业有哪些意义
- 2023年阿里云云栖大会:前沿技术发布与未来展望
- 【LeetCode】数学精选4题
- 视频美颜SDK趋势畅想:未来发展方向与应用场景
- PIG框架学习3——Redisson 实现业务接口幂等
- 信号处理基础之噪声与降噪(二)| 时域降噪方法(平滑降噪、SVD降噪)python代码实现