VisionMaster十二点旋转标定不共轴抓取
发布时间:2024年01月22日
书接上回,九点标定用的是同心轴(工件中心和机器旋转点重合),但是会出现角度变化导致X、Y的偏差。
- 下图中央的大矩形是我们要抓的工件,实际就是PCB了,但是由于场地、机构受限,只能拍一半,就是三角形和圆那部分。此案例以识别三角行为匹配模板。
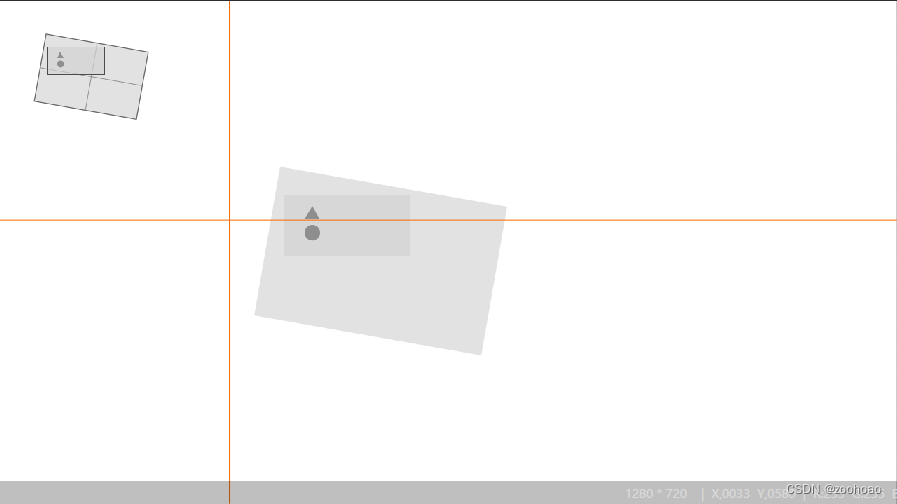
标定采用平移旋转标定,最后三点进行旋转,这三点一般位于第5点进行旋转不平移。当十二点标定完成后,我们使用标定转换看看坐标变化。
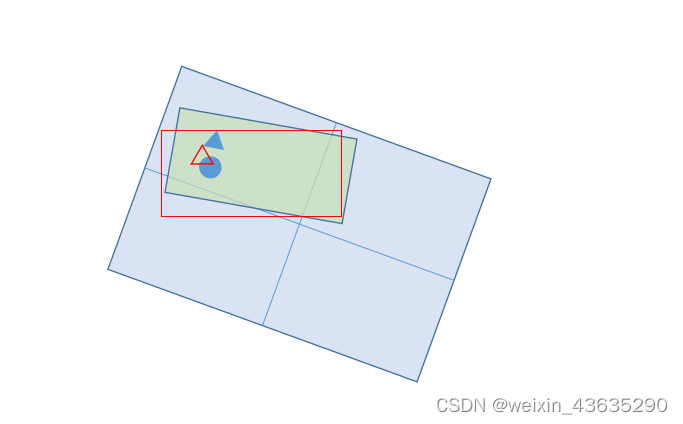
可以看出最后旋转的三点坐标,x、y误差相差较大。虽然只旋转了角度,但是由于旋转中心不一样,所以会出现x、y的变化。
下图就是只旋转的变化图,可以看出,三角形中心位置发生了改变,这就是因为旋转中心和三角形的中心不一致导致的。
文章来源:https://blog.csdn.net/weixin_43635290/article/details/135733963
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 如何格式化硬盘?分享3个正确方法!
- 扎心!圣诞礼物含“毒”量极高,当心惊喜变惊吓!
- 数据结构与算法之约瑟夫问题求解
- Promise 函数编程
- Linux 与 Shell
- 如何解决msvcr100.dll丢失问题,深度解析5种靠谱的方法
- 使用java备份和恢复SQLServer表数据
- 怎么判断台灯是否护眼?分享适合考研使用的护眼台灯
- Python基础(五、掌握for循环、range、break和continue用法,猜数游戏)
- 【Linux】提高服务器性能的实用技巧:如何使用ddlinux