FreeRTOS——内存管理知识总结及实战
发布时间:2024年01月05日
1 freeRTOS动态创建与静态创建
动态创建:从FreeRTOS 管理的内存堆中申请创建对象所需的内存,在对象删除后,
这块内存释放回FreeRTOS管理的内存堆中
静态创建:需用户提供各种内存空间,并且使用静态方式占用的内存空间一般固定下来了,即使任务、队列等被删除后,这些被占用的内存空间一般没有其他用途
2 FreeRTOS内存管理算法

常用算法 heap_4
3 4种算法详解
3.1 heap_1
/* 定义一个大数组作为 FreeRTOS 管理的内存堆 */
static uint8_t ucHeap[ configTOTAL_HEAP_SIZE ];
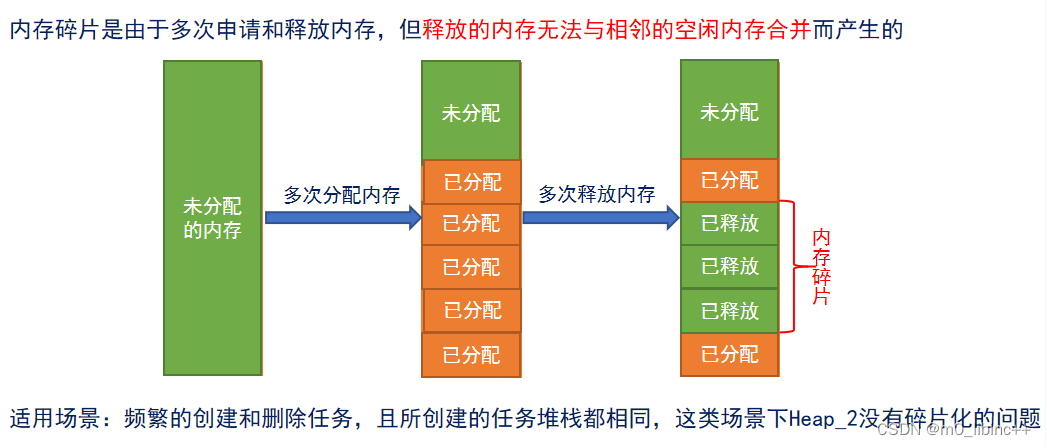
3.2 heap_2
heap_2 内存管理算法使用最适应算法,并且支持释放内存,但不能将相邻的空闲内存块合并成一个大的空闲内存块。
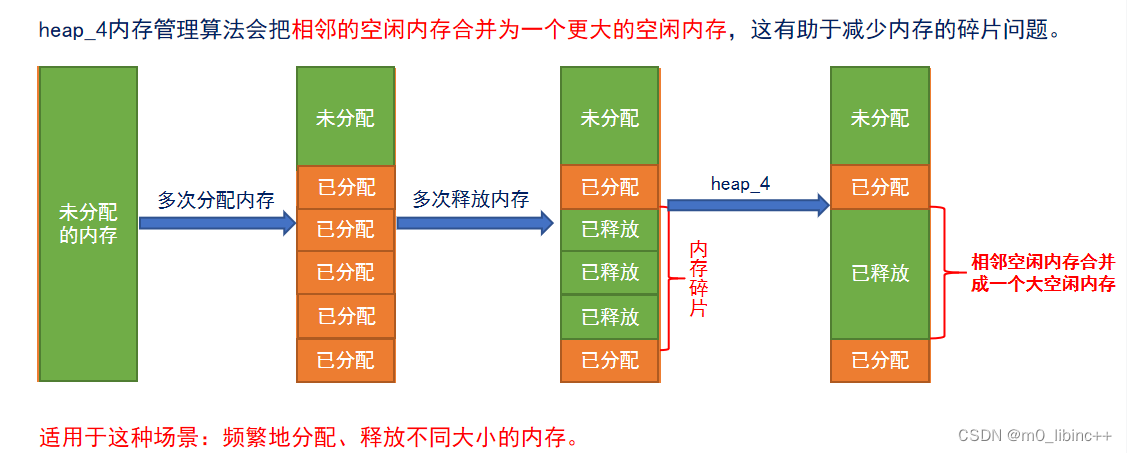
3.3 heap_4
使用了首次适应算法,也支持内存的申请与释放,并且能够将空闲且相邻的内存进行合并,从而减少内存碎片的现象。
3.4 heap_5
1)heap_5 内存管理算法是在 heap_4 内存管理算法的基础上实现的,但是 heap_5 内存管理算法在 heap_4 内存管理算法的基础上实现了管理多个非连续内存区域的能力
2)heap_5 内存管理算法默认并没有定义内存堆 , 需要用户手动指定内存区域的信息,对其进行初始化。
typedef struct HeapRegion{
uint8_t * pucStartAddress; /* 内存区域的起始地址 */
size_t xSizeInBytes; /* 内存区域的大小,单位:字节 */
} HeapRegion_t;
Const HeapRegion_t xHeapRegions[] ={
{ (uint8_t *)0x80000000, 0x10000 }, /* 内存区域 1 */
{ (uint8_t *)0x90000000, 0xA0000 }, /* 内存区域 2 */
{ NULL, 0 } /* 数组终止标志*/
};
vPortDefineHeapRegions(xHeapRegions);
适用场景:在嵌入式系统中,那些内存的地址并不连续的场景。
4 FreeRTOS内存管理相关API函数
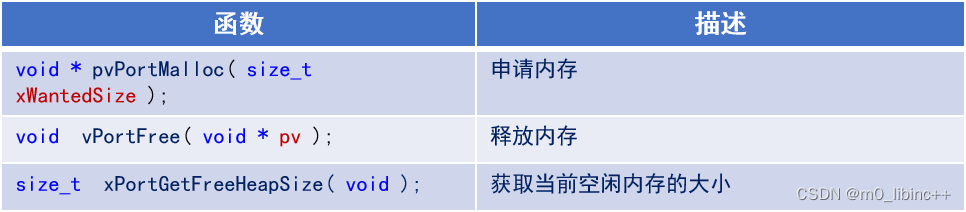
1)申请内存
void * pvPortMalloc( size_t xWantedSize );
形参:
xWantedSize:申请的内存大小,以字节为单位
返回值:
其他指针 成功
NULL 申请内存失败
2)释放内存
void vPortFree( void * pv );
形参:
pv: 指针指向一个要释放内存的内存块
3)获取当前空闲内存大小
size_t xPortGetFreeHeapSize( void )
返回值:
size_t 返回当前剩余的空闲内存大小
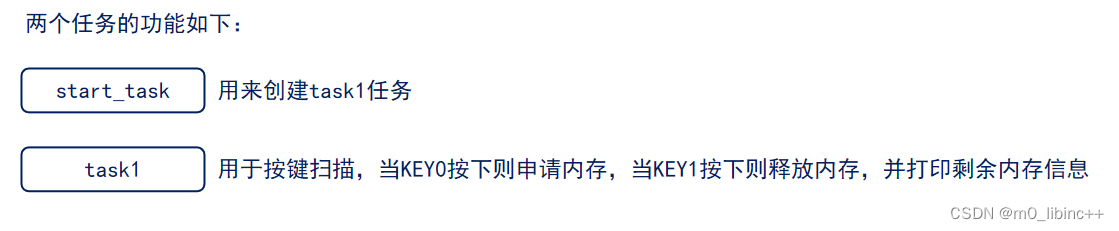
4 FreeRTOS内存管理实战
#include "freertos_demo.h"
#include "./BSP/LCD/lcd.h"
#include "./BSP/KEY/key.h"
/*FreeRTOS*********************************************************************************************/
#include "FreeRTOS.h"
#include "task.h"
/******************************************************************************************************/
/*FreeRTOS配置*/
/* START_TASK 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define START_TASK_PRIO 1 /* 任务优先级 */
#define START_STK_SIZE 128 /* 任务堆栈大小 */
TaskHandle_t StartTask_Handler; /* 任务句柄 */
void start_task(void *pvParameters); /* 任务函数 */
/* TASK1 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define TASK1_PRIO 2 /* 任务优先级 */
#define TASK1_STK_SIZE 128 /* 任务堆栈大小 */
TaskHandle_t Task1Task_Handler; /* 任务句柄 */
void task1(void *pvParameters); /* 任务函数 */
/******************************************************************************************************/
/**
* @brief FreeRTOS例程入口函数
* @param 无
* @retval 无
*/
void freertos_demo(void)
{
xTaskCreate((TaskFunction_t )start_task, /* 任务函数 */
(const char* )"start_task", /* 任务名称 */
(uint16_t )START_STK_SIZE, /* 任务堆栈大小 */
(void* )NULL, /* 传入给任务函数的参数 */
(UBaseType_t )START_TASK_PRIO, /* 任务优先级 */
(TaskHandle_t* )&StartTask_Handler); /* 任务句柄 */
vTaskStartScheduler();
}
/**
* @brief start_task
* @param pvParameters : 传入参数(未用到)
* @retval 无
*/
void start_task(void *pvParameters)
{
taskENTER_CRITICAL(); /* 进入临界区 */
/* 创建任务1 */
xTaskCreate((TaskFunction_t )task1,
(const char* )"task1",
(uint16_t )TASK1_STK_SIZE,
(void* )NULL,
(UBaseType_t )TASK1_PRIO,
(TaskHandle_t* )&Task1Task_Handler);
vTaskDelete(StartTask_Handler); /* 删除开始任务 */
taskEXIT_CRITICAL(); /* 退出临界区 */
}
/**
* @brief task1
* @param pvParameters : 传入参数(未用到)
* @retval 无
*/
void task1(void *pvParameters)
{
uint8_t key = 0,t = 0;
uint8_t * buf =NULL;
while (1)
{
key = key_scan(0);
//申请内存
if(key == KEY0_PRES)
{
buf = pvPortMalloc(30);
if(buf != NULL)
{
printf("内存申请成功\r\n");
}else
{
printf("内存申请失败\r\n");
}
}
//释放内存
else if(key == KEY1_PRES)
{
if(buf != NULL)
{
vPortFree(buf);
printf("内存释放成功\r\n");
}
}
//获取空闲内存大小
if(t++ >50)
{
t=0;
printf("剩余空闲内存大小:%d\r\n",xPortGetFreeHeapSize());
}
vTaskDelay(10);
}
}
文章来源:https://blog.csdn.net/m0_73502349/article/details/135413920
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Docker consul
- 孩视宝、飞利浦、书客护眼台灯怎么样?多方位深度测评对比
- wps将姓名处理格式为:姓**
- jQuery之淡入与淡出
- 大模型时代还需要知识图谱么?新一代知识图谱语义框架SPG赋能企业数智化转型
- Vue3.2多页签导航来了:让你的应用更加灵活与强大!
- 第23节: Vue3 绑定 HTML 类
- 基于JavaWeb+BS架构+SpringBoot+Vue基于hive旅游数据的分析与应用系统的设计和实现
- Linux cut命令教程:如何高效地处理文本(附案例详解和注意事项)
- Nextjs打包类型检查报错ype error: Property ‘card_list‘ does not exist on type(已解决)