colmap三维重建核心逻辑梳理
发布时间:2023年12月18日
1. 算法流程束流
重建核心逻辑见 incremental_mapper.cc 中 IncrementMapperController 中 Reconstruct
- 初始化变量和对象
- 判断是否有初始重建模型,若有,则获取初始重建模型数量,判断是否超过1个
- 进入初始重建循环,根据初始重建次数进行循环
- 判断是否暂停或停止,若停止则退出
- 添加或获取重建对象
- 执行重建初始化
- 寻找初始影像对,若未指定则尝试寻找
- 注册初始影像对,并进行全局束调整和点云筛选
- 提取影像颜色
- 回调初始化影像对注册完成
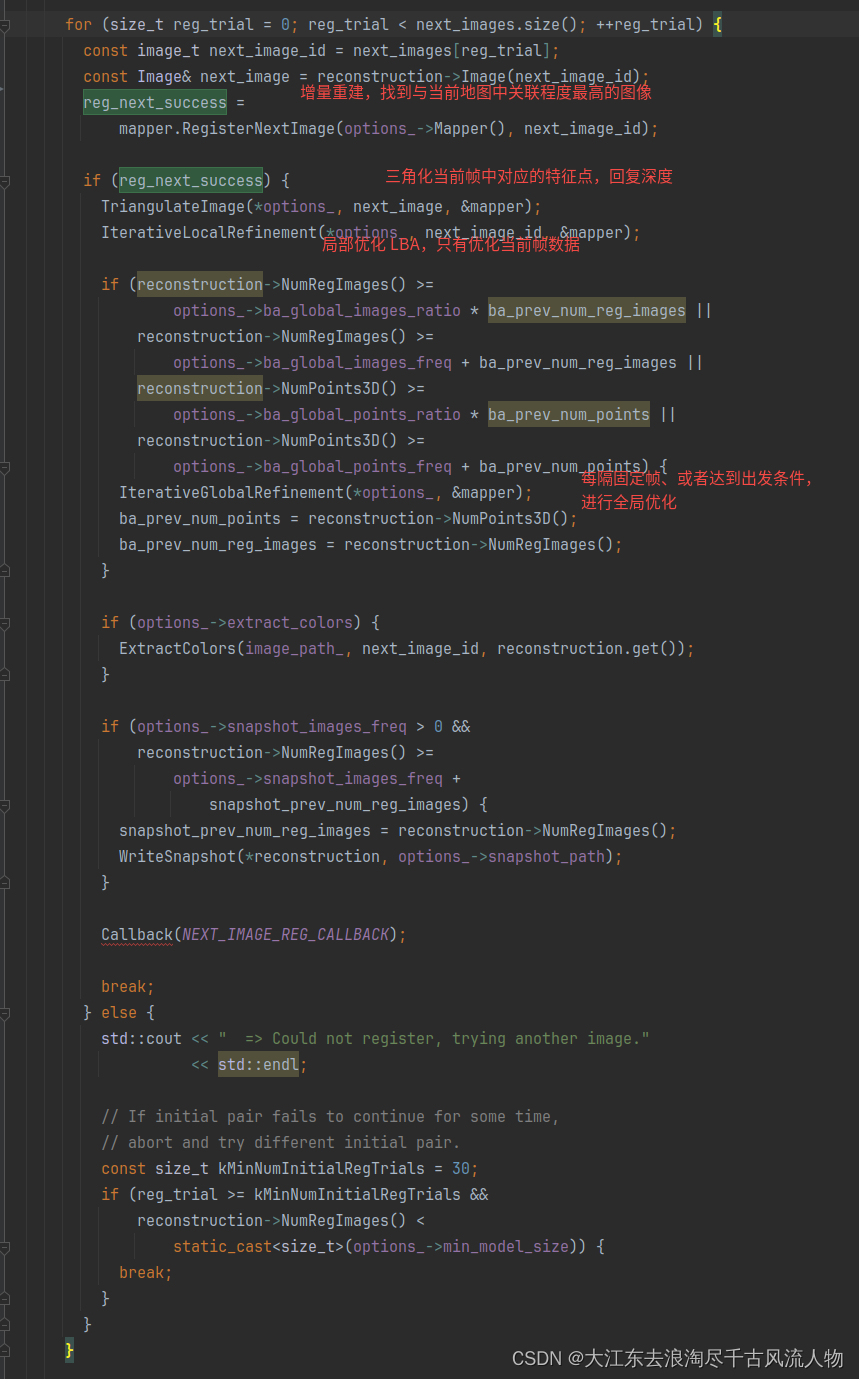
- 进行增量重建
- 注册下一个影像,并进行局部和全局细化
- 提取影像颜色,根据条件写入快照,回调影像注册完成
- 若停止,则结束重建并退出
- 在一定条件下进行最终的全局细化
- 根据重建模型数量和总注册影像数量决定是否结束循环
2. 初始化

3. 重建主流程
文章来源:https://blog.csdn.net/Darlingqiang/article/details/135057595
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 启用Windows 10/11防火墙的四种方法,总有一种适合你
- STM32通用定时器-输入捕获-脉冲计数
- 即将推出的 OpenWrt One/AP-24.XY:OpenWrt 和 Banana Pi 合作路由器板
- ROS安装PR2
- 第16集《佛法修学概要》
- 让高清媒体无限畅享——Movist Pro for Mac推广文章
- viewer插件——预览图片时一直闪烁——问题修复,亲测有效
- 【2024最新】如何有效搭建自动化测试框架?
- 如何通过IDEA创建基于Java8的Spring Boot项目
- godot 报错Unable to initialize Vulkan video driver解决