STK 特定问题建模(六)多跳(Multi-Hop)通信链路仿真(第一部分)
简介
本篇对多跳通信链路进行仿真,对多跳链路可用性、链路质量、误码率等指标进行分析。
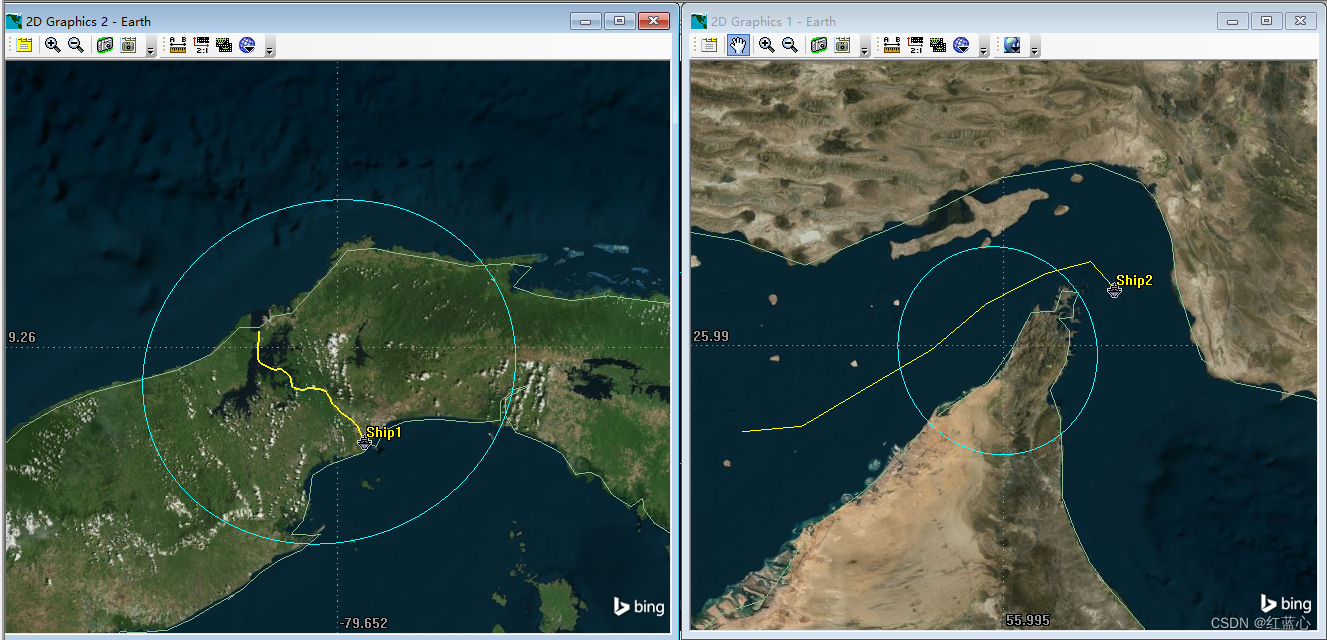
仿真考虑两艘地面船舶,一艘位于巴拿马运河区,另一艘位于霍尔木兹海峡,两艘船位于地球对侧,无法直接通信。每艘船上空有一颗地球同步轨道(GEO)卫星,GEO卫星间可以建立星间链路。因此,两艘船舶需要依赖卫星,通过多跳链路实现通信。
建模将从以下几个部分开展:
1、地面船舶、GEO卫星仿真
2、星地收发机设计
3、多跳通信链路每一跳链路质量评估
本篇对应1部分内容。
一、地面船舶、GEO卫星仿真
1.1 船舶、GEO创建
首先创建两艘地面船舶,通过Insert—ship 插入两艘船,并对其航迹点进行设置。第一艘船穿越巴拿马运河,双击打开第一艘船舶属性,在Basic—Route中设置航迹点,鼠标直接在2D窗口中进行点击,生成航迹点,结果如下:

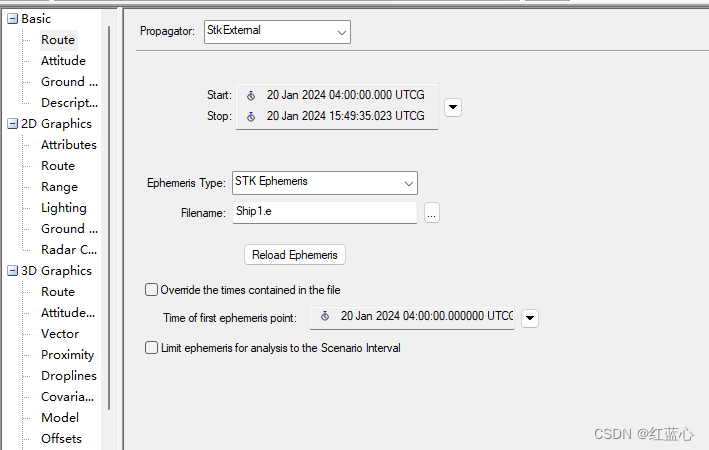
这里将生成的船舶航迹导出,采用星历文件导出(Ephemeris File Format .e),结果见文件(链接:https://pan.baidu.com/s/1UZCZZIfnM_jIj0DEjhcqVQ
提取码:8mpz),因此可以通过星历文件方式插入船舶轨迹,将Propagator选择为Stk External,选择分享的星历文件即可
与此同理,创建第二艘位于霍尔木兹海峡的船舶航迹点,结果如下:
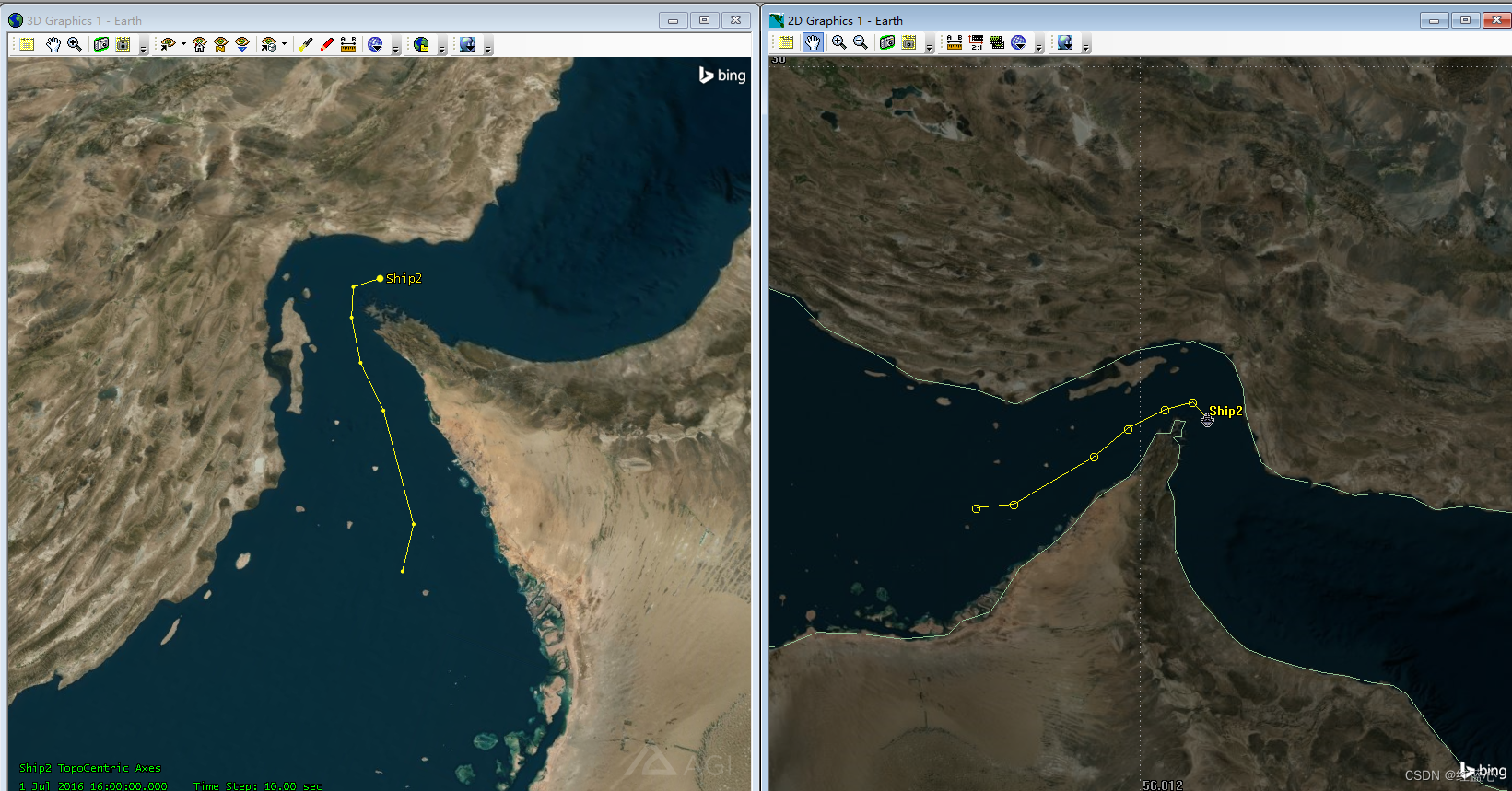
该航迹点轨迹也在分享连接中。
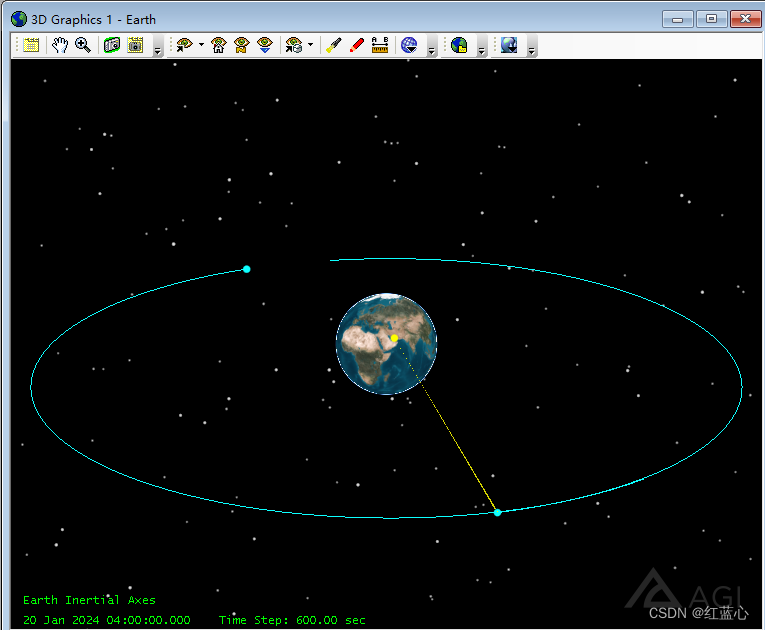
接下来创建两颗GEO卫星,分别位于两艘船舶上空。通过Insert—satellite—Define Properties方式插入,两颗卫星轨道如下:


创建完后的卫星如下:

1.2 传感器设计
接下来创建卫星和船舶之间的传感器,从而约束卫星与地面、卫星之间传输的波束角。仿真以船舶2—卫星2—卫星1—船舶1链路为例,因此需要分别创建每一条链路的传感器。首先,以位于霍尔木兹海峡的船向卫星2指向为例,Insert—Sensor,将其固连在Ship2下,双击编辑属性,设置上行链路半波束角为0.1°,而后在Pointing中,让其指向锁定卫星2

结果如下:
接下来创建卫星2—卫星1,插入传感器,将其固连在卫星2下,设置半波束角为0.1°,指向锁定卫星1(GEO卫星传感器默认指向地心,因此需要设置指向建立星见链路)。同理,设置卫星1指向锁定卫星2链路,结果如下:

而后,分别设置两个卫星对地指向传感器,与以上不同的是,卫星传感器指向不需要锁定地面船只,而是指向地面区域,当船只进入该区域时,便可接收到卫星覆盖的信号。设置卫星1对地指向传感器Azimuth为-24.6 deg,Elevation为86.2 deg;卫星2对地指向传感器Azimuth为-98 deg,Elevation为85.6 deg。最后创建的传感器指向情况如下,

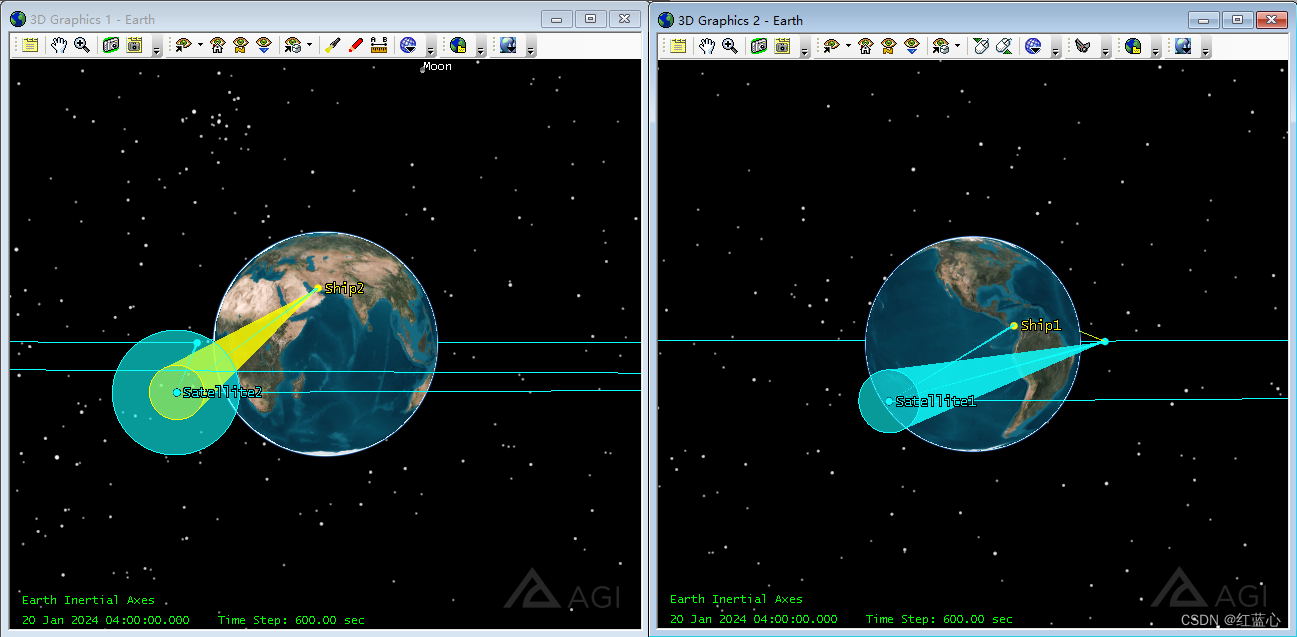
两颗卫星对地传感器覆盖情况如下:
可以看到,卫星1传感器始终覆盖船1,卫星2覆盖部分航迹
未完待续
更多仿真内容,可以关注公众号“STK建模”查看

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!