Arduino使用PWM驱动TB6612控制直流减速电机
发布时间:2024年01月04日
目录
一、PWM介绍
前面有见过使用PWM控制呼吸灯的实验:Arduino-多种模式下IO输入读取和输出控制-CSDN博客
(三、LED呼吸灯控制)
PWM引脚说明

二、硬件介绍
1、设备型号
单片机:Arduino MEGA 2560
电机驱动芯片:TB6612
电机:JGB-520直流减速电机

TB6612电机驱动芯片

JGB-520直流减速电机

系统整体接线图
2、接线图
电机、驱动芯片、控制器接线说明。数字表示接单片机的引脚。

3、TB6612控制电机转动逻辑
(1)控制逻辑
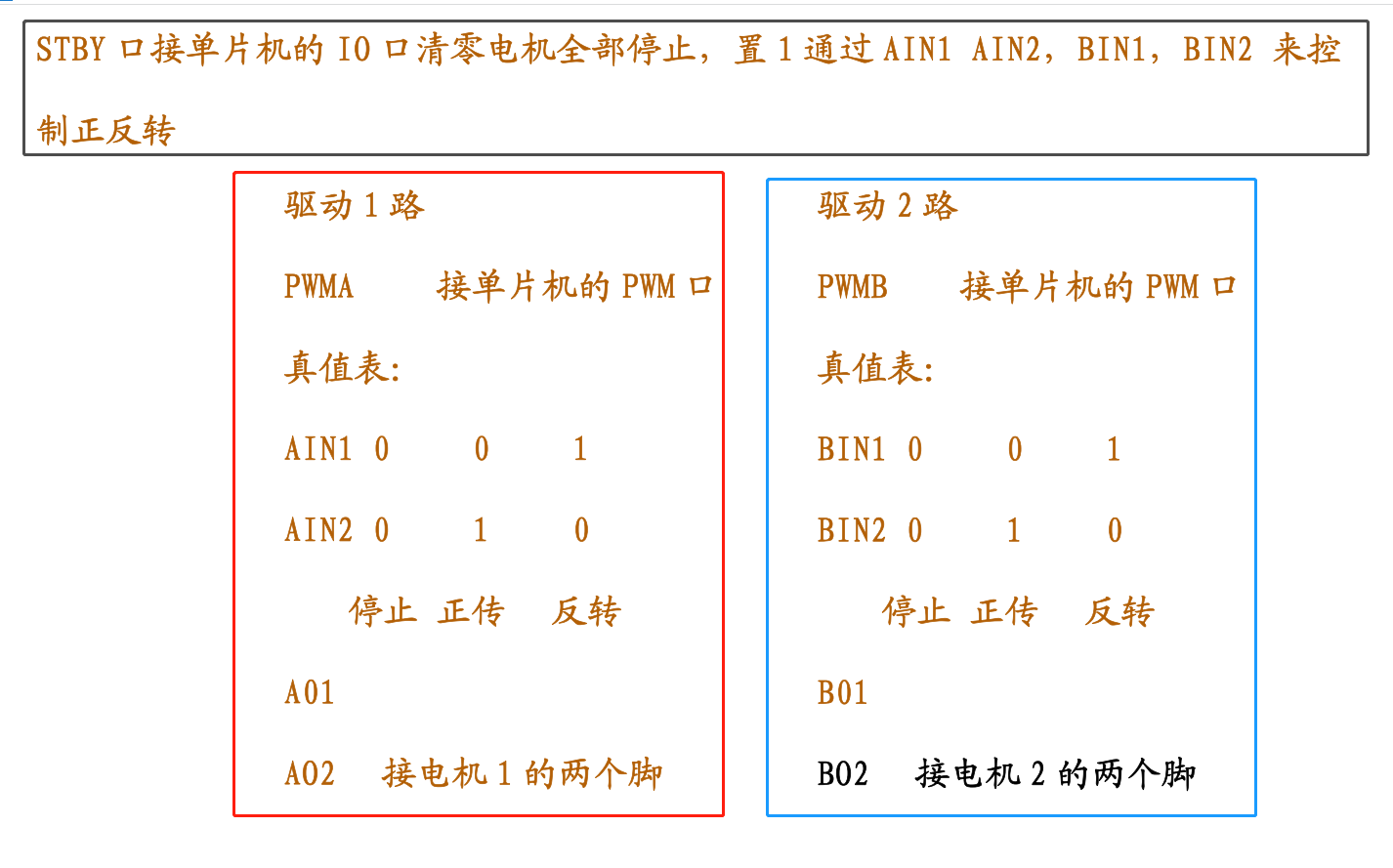
(2)真值表

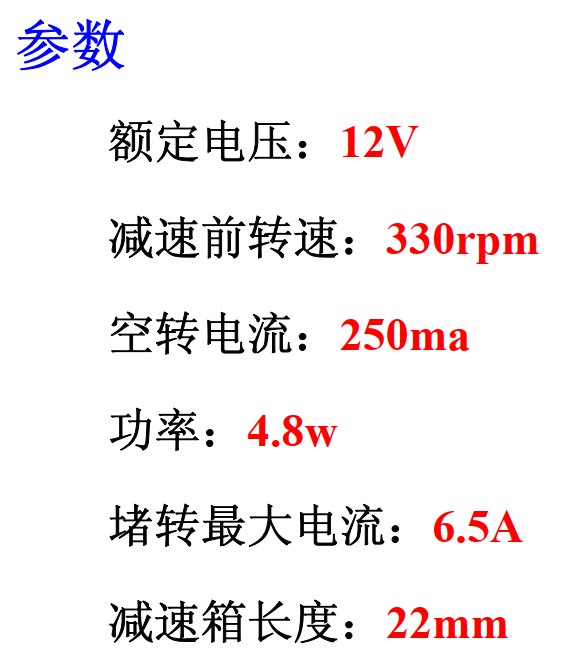
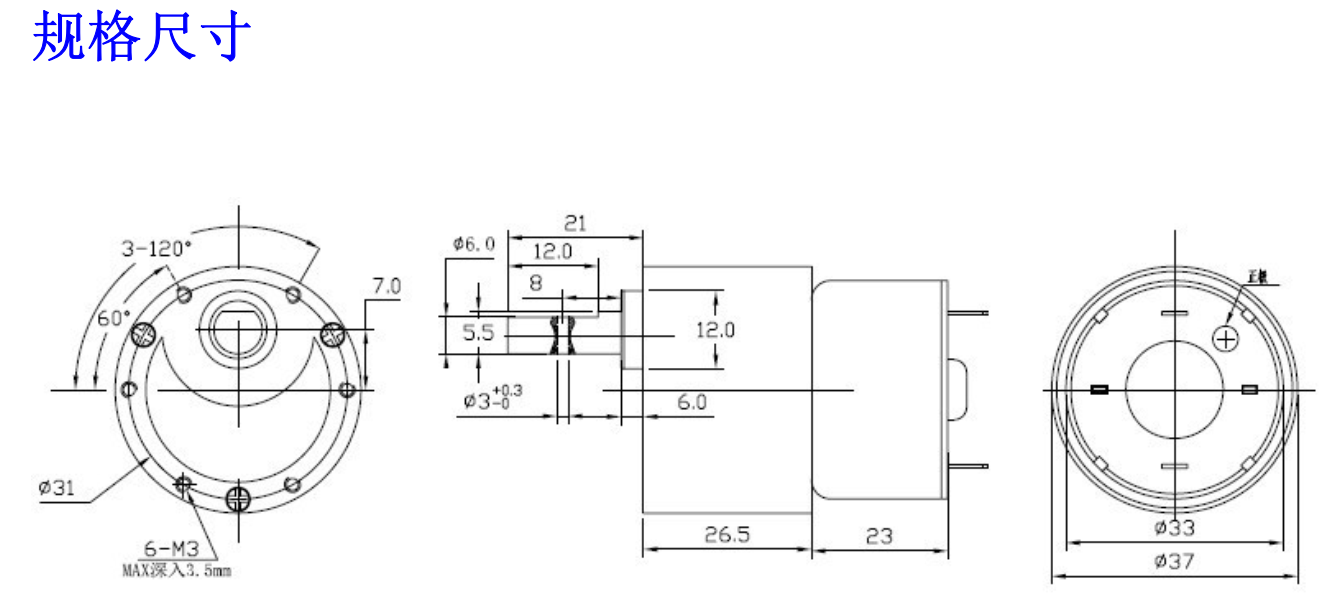
4、G37系列JGB-520直流减速电机
JGB-520直流减速电机,减速比为1:30。
测速码盘模组是一款使用霍尔传感器编码器的测速模块,配有13线强磁码盘,AB双相输出共同利用下,通过计算可得出末端轮子转一圈,脉冲数为30*13*2=780。如果使用单相脉冲数为30*13*1=390。
三、测试程序
1、电机正反转控制
代码
int STBY = 8; //使能端
//Motor A
int PWMA = 9; //左电机PWM输出控制脚
int AIN1 = 7; //左电机正极
int AIN2 = 6; //左电机负极
//Motor B
int PWMB = 10; //右电机PWM输出控制脚
int BIN1 = 13; //右电机正极
int BIN2 = 12; //右电机负极
void setup(){
pinMode(STBY, OUTPUT);
pinMode(PWMA, OUTPUT);
pinMode(AIN1, OUTPUT);
pinMode(AIN2, OUTPUT);
pinMode(PWMB, OUTPUT);
pinMode(BIN1, OUTPUT);
pinMode(BIN2, OUTPUT);
}
void runset(int motor, int speed, int direction){
digitalWrite(STBY, HIGH); //使能驱动模块脚
boolean Pin1 = LOW;
boolean Pin2 = HIGH;
if(direction == 1){
Pin1 = HIGH;
Pin2 = LOW;
}
if(motor == 1){
digitalWrite(AIN1, Pin1);
digitalWrite(AIN2, Pin2);
analogWrite(PWMA, speed);
}else{
digitalWrite(BIN1, Pin1);
digitalWrite(BIN2, Pin2);
analogWrite(PWMB, speed);
}
}
void loop(){
runset(1, 255, 1); //左电机全速向前转
runset(2, 255, 1); //右电机全速向前转
delay(1000); //1秒
stop(); //停转
delay(250); //两轮继续向前转
runset(1, 128, 0); //左电机半速向后转
runset(2, 128, 0); //右电机半速向后转
delay(1000);
stop();
delay(250);
}
void stop(){
digitalWrite(STBY, LOW);
} 2、编码器脉冲读取
(1)方式1
①实现方式
1)对1#电机编码器脉冲读取
2)使用一个中断外部输入中断方式,读取脉冲数量。
3)编码器A、B相接单片机两个引脚,判断两个引脚信号,来计算脉冲。
②代码
读取的编码器脉冲累计数量保存,使用long型。long保存的最大值2^32=4294967296
//
const long _1000msTime = 1000; // 1000 milli seconds
unsigned long _1000msLastTime;
const long _100msTime = 100; // 100 milli seconds
unsigned long _100msLastTime;
const long _10msTime = 10; // 10 milli seconds
unsigned long _10msLastTime;
//编码器引脚定义-1#电机
#define APin 3 //Encoder的A相引脚
#define BPin 2 //Encoder的B相引脚
volatile long PulsCount=0; //脉冲累计数量
volatile long PulsSpeed=0; //当前每秒脉冲数
//电机控制
int STBY = 8; //使能端
//Motor A
int PWMA = 9; //左电机PWM输出控制脚
int AIN1 = 7; //左电机正极
int AIN2 = 6; //左电机负极
//Motor B
int PWMB = 10; //右电机PWM输出控制脚
int BIN1 = 13; //右电机正极
int BIN2 = 12; //右电机负极
void setup()
{
Serial.begin(9600);
//
pinMode(STBY, OUTPUT);
pinMode(PWMA, OUTPUT);
pinMode(AIN1, OUTPUT);
pinMode(AIN2, OUTPUT);
pinMode(PWMB, OUTPUT);
pinMode(BIN1, OUTPUT);
pinMode(BIN2, OUTPUT);
//设置编码器引脚为输入
pinMode(APin, INPUT_PULLUP);
pinMode(BPin, INPUT_PULLUP);
//为引脚添加中断函数
attachInterrupt(digitalPinToInterrupt(APin),Encoder_Count,CHANGE); //当电平发生改变时触发中断函数--------------------两个引脚都要接
/*================中断函数说明============================
*attachInterrupt(中断引脚,中断函数,CHANGE)
*LOW: 当引脚为低电平时触发中断服务程序
*CHANGE: 当引脚电平发生变化时触发中断服务程序
*RISING: 当引脚电平由低电平变为高电平时触发中断服务程序
*FALLING: 当引脚电平由高电平变为低电平时触发中断服务程序
*=======================================================
*/
}
void loop()
{
runset(1, 64, 1); //左电机半速向后转
runset(2, 64, 0); //右电机半速向后转
//
TimeProc();
//interrupts(); //中断启用
//noInterrupts(); //中断禁用
}
void TimeProc()
{
//1000ms执行一次
if ((millis() - _1000msLastTime) >= _1000msTime)
{
_1000msLastTime = millis( );
//累计脉冲数量
Serial.print("Encoder Accumulate puls is:");
Serial.println(PulsCount);
//每秒钟脉冲数量->390个脉冲转一圈
Serial.print("Encoder speed puls is:");
Serial.println(PulsSpeed);
PulsSpeed=0;
}
//100ms执行一次
if ((millis() - _100msLastTime) >= _100msTime)
{
_100msLastTime = millis( );
//
}
//10ms执行一次
if ((millis() - _10msLastTime) >= _10msTime)
{
_10msLastTime = millis( );
//
}
}
//定义中断函数 ——编码器计数函数
void Encoder_Count()
{
int a=digitalRead(APin); //将高低电平转化为int型数值
int b=digitalRead(BPin);
//a为上升沿的时 b为1 或者a为下降沿时 b为0
if(a==b)
{
PulsCount++; //顺时针转动
PulsSpeed++;
}
else
{
//a为上升沿的时 b为0 或者a为下降沿时 b为1
PulsCount--; //逆时针转动
PulsSpeed--;
}
}
void runset(int motor, int speed, int direction)
{
digitalWrite(STBY, HIGH); //使能驱动模块脚
boolean Pin1 = LOW;
boolean Pin2 = HIGH;
if(direction == 1)
{
Pin1 = HIGH;
Pin2 = LOW;
}
if(motor == 1)
{
digitalWrite(AIN1, Pin1);
digitalWrite(AIN2, Pin2);
analogWrite(PWMA, speed);
}
else
{
digitalWrite(BIN1, Pin1);
digitalWrite(BIN2, Pin2);
analogWrite(PWMB, speed);
}
}
void stop()
{
digitalWrite(STBY, LOW);
} ③测试
累计脉冲数量、每秒钟脉冲数量读取如下:

(2)方式2
①实现方式
1)对1#电机、2#电机编码器脉冲读取
2)使用两个个中断外部输入中断方式,读取脉冲数量。
3)两个电机编码器A相分别接单片机两个引脚,判断引脚信号,来计算脉冲。
4)确定电机旋转方向,正转时候读取的编码器脉冲值自加、反转的时候读取的编码器脉冲值自减。
②代码
//
const long _1000msTime = 1000; // 1000 milli seconds
unsigned long _1000msLastTime;
const long _100msTime = 100; // 100 milli seconds
unsigned long _100msLastTime;
const long _10msTime = 10; // 10 milli seconds
unsigned long _10msLastTime;
//初始编码器引脚定义与计数定义 全局变量
#define APin 3 //1#电机-Encoder的A相引脚
#define BPin 2 //2#电机-Encoder的A相引脚
volatile long count=0;//定义计数变量
//电机控制
int STBY = 8; //使能端
//Motor A
int PWMA = 9; //左电机PWM输出控制脚
int AIN1 = 7; //左电机正极
int AIN2 = 6; //左电机负极
//Motor B
int PWMB = 10; //右电机PWM输出控制脚
int BIN1 = 13; //右电机正极
int BIN2 = 12; //右电机负极
//1#电机脉冲
volatile long PulsCount_Motor1=0; //脉冲累计数量
long PulsSpeed_Motor1=0; //当前每秒脉冲数
//2#电机脉冲
volatile long PulsCount_Motor2=0; //脉冲累计数量
long PulsSpeed_Motor2=0; //当前每秒脉冲数
//电机旋转方向
int motor1_Dir=1; //定义1为正转,0为反转
int motor2_Dir=1;
void setup()
{
Serial.begin(9600);
//
pinMode(STBY, OUTPUT);
pinMode(PWMA, OUTPUT);
pinMode(AIN1, OUTPUT);
pinMode(AIN2, OUTPUT);
pinMode(PWMB, OUTPUT);
pinMode(BIN1, OUTPUT);
pinMode(BIN2, OUTPUT);
//设置编码器引脚为输入
pinMode(APin, INPUT_PULLUP);
pinMode(BPin, INPUT_PULLUP);
//为引脚添加中断函数
//attachInterrupt(digitalPinToInterrupt(APin),incrementCount,RISING); //当电平发生改变时触发中断函数-----------接1个引脚
attachInterrupt(digitalPinToInterrupt(APin),Encoder1_Count,CHANGE); //当电平发生改变时触发中断函数-----------接1个引脚
attachInterrupt(digitalPinToInterrupt(BPin),Encoder2_Count,CHANGE); //当电平发生改变时触发中断函数-----------接1个引脚
/*================中断函数说明============================
*attachInterrupt(中断引脚,中断函数,CHANGE)
*LOW: 当引脚为低电平时触发中断服务程序
*CHANGE: 当引脚电平发生变化时触发中断服务程序
*RISING: 当引脚电平由低电平变为高电平时触发中断服务程序
*FALLING: 当引脚电平由高电平变为低电平时触发中断服务程序
*=======================================================
*/
}
void loop()
{
motor1_Dir=1;
motor2_Dir=0;
runset(1, 64, motor1_Dir); //左电机正转
runset(2, 64, motor2_Dir); //右电机反转
//
TimeProc();
}
void TimeProc()
{
//1000ms执行一次
if ((millis() - _1000msLastTime) >= _1000msTime)
{
_1000msLastTime = millis( );
//1#电机编码器脉冲反馈
Serial.print("Motor1 pules is:");
Serial.print(PulsCount_Motor1);
Serial.print(" ; ");
Serial.print("Encoder speed puls is:");
Serial.println(PulsSpeed_Motor1);
PulsSpeed_Motor1=0;
//2#电机编码器脉冲反馈
Serial.print("Motor2 pules is:");
Serial.print(PulsCount_Motor2);
Serial.print(" ; ");
Serial.print("Encoder speed puls is:");
Serial.println(PulsSpeed_Motor2);
PulsSpeed_Motor2=0;
}
//100ms执行一次
if ((millis() - _100msLastTime) >= _100msTime)
{
_100msLastTime = millis( );
//
}
//10ms执行一次
if ((millis() - _10msLastTime) >= _10msTime)
{
_10msLastTime = millis( );
}
}
void Encoder1_Count()
{
if(motor1_Dir==1)
{
PulsCount_Motor1++;
PulsSpeed_Motor1++;
}
else
{
PulsCount_Motor1--;
PulsSpeed_Motor1--;
}
}
void Encoder2_Count()
{
if(motor2_Dir==1)
{
PulsCount_Motor2++;
PulsSpeed_Motor2++;
}
else
{
PulsCount_Motor2--;
PulsSpeed_Motor2--;
}
}
void runset(int motor, int speed, int direction)
{
digitalWrite(STBY, HIGH); //使能驱动模块脚
boolean Pin1 = LOW;
boolean Pin2 = HIGH;
if(direction == 1)
{
Pin1 = HIGH;
Pin2 = LOW;
}
if(motor == 1)
{
digitalWrite(AIN1, Pin1);
digitalWrite(AIN2, Pin2);
analogWrite(PWMA, speed);
}
else
{
digitalWrite(BIN1, Pin1);
digitalWrite(BIN2, Pin2);
analogWrite(PWMB, speed);
}
}
void stop()
{
digitalWrite(STBY, LOW);
} ③测试
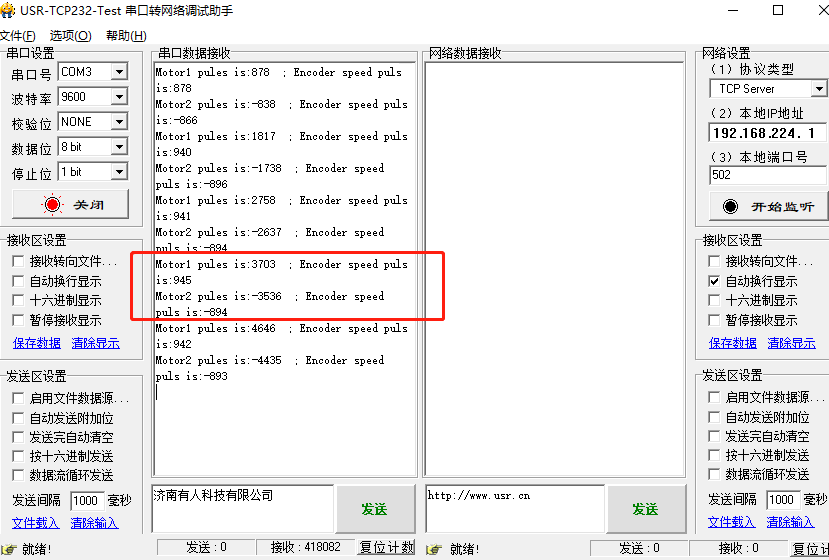
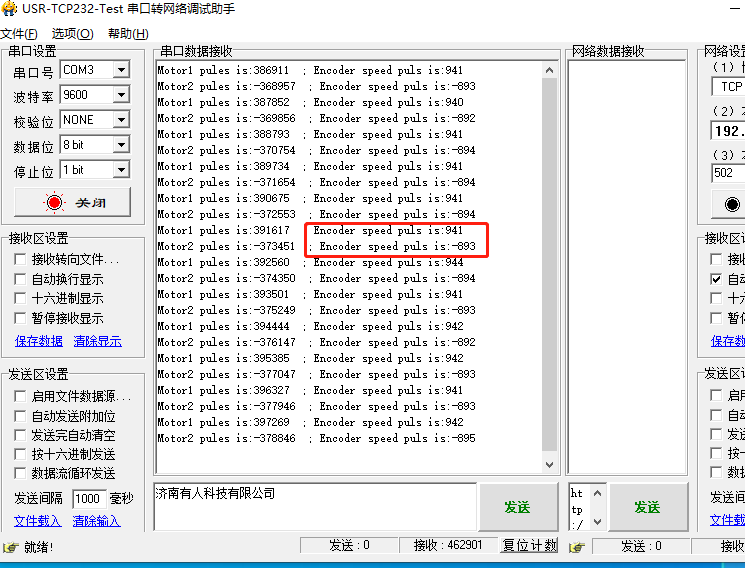
3、减速电机转速计算
①如下图所示,得到每秒钟的编码器脉冲数量。②减速电机末端轴转一圈脉冲是390。
则计算减速电机末端每秒钟旋转的圈数:
旋转速度=Encoder speed puls/390。
如图圈出来的:电机1转速:941/390=2.1428转/秒、电机2转速:-893/390=-2.2897转/秒
文章来源:https://blog.csdn.net/panjinliang066333/article/details/135367084
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 网络与信息安全基础知识 (软件设计师笔记)
- 【深入理解 ByteBuf 之一】 release() 的必要性
- 深入理解 HTTP 和 HTTPS:提升你的网站安全性(上)
- 零基础学C语言——指针
- 如何对制作好的查询进行编辑和导出?
- 一个完整的流程表单流转
- 33岁前端干了8年,是继续做前端开发,还是转其他工作?
- 使用特殊打字机键入单词的最少时间(贪心算法)
- [NOIP2012 普及组] 摆花
- Ubuntu上mosquitto下载编译