文章阅读总结:多传感器融合:GNSS微弱信号场景的补救措施
发布时间:2024年01月16日
@[TOC](多传感器融合导航论文积累)
# 知识点总结
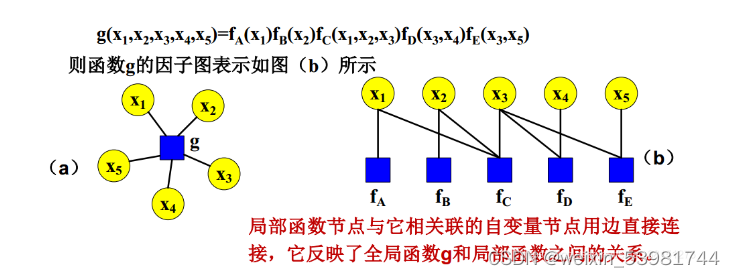
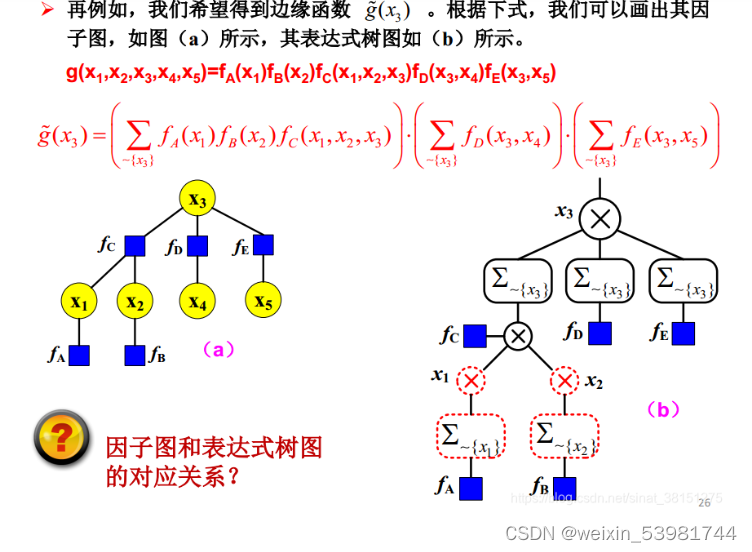
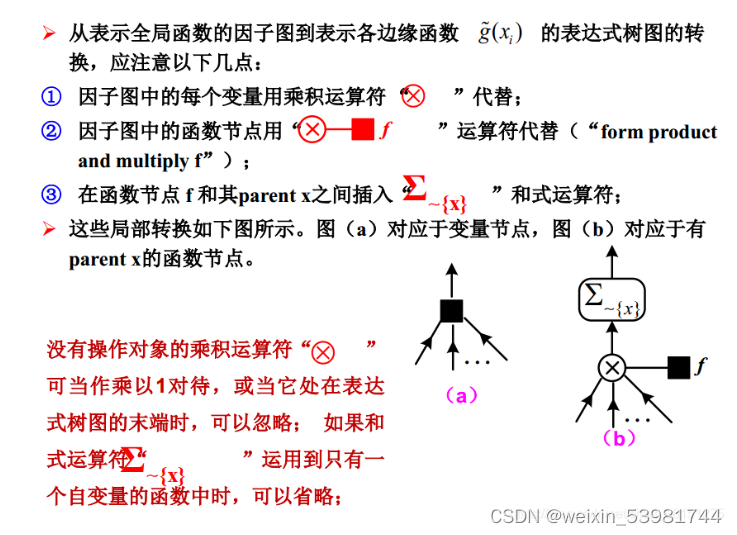
## 因子图
Factor Graph 是概率图的一种,是对函数因子分解的表示图,一般内含两种节点,变量节点和函数节点。
因子图存在着:**两类节点: 变量节点和对应的函数节点**变量节点所代表的变量是函数节点的自变量。 同类节点之间没有边直接相连。
## 一致因子图
一致性指的是在该框架中能够保持一致性地更新变量的值,使得整个概率图模型中的变量和因子之间的关系是一致的。
# 文献阅读笔记[IF 18.6]
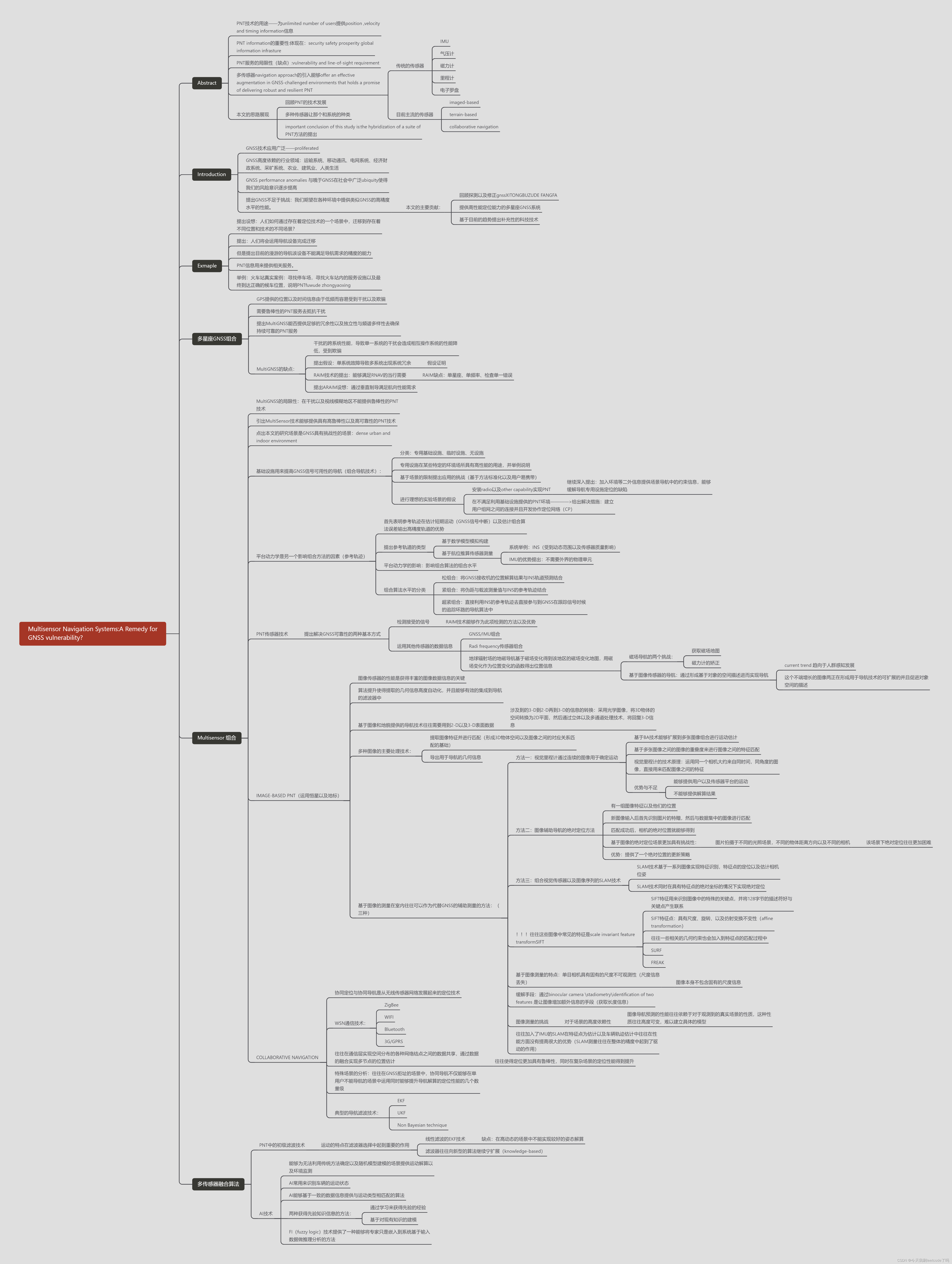
文章来源:https://blog.csdn.net/2201_76063234/article/details/135307076
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Leetcode 763 划分字母区间
- 2.2 数据预处理
- C语言——双向链表的实现
- 用友NC word.docx 任意文件读取漏洞复现
- 【无标题】
- 在线表白网页制作源码,无需数据库,自带网站会员付费
- 机器学习--人工智能概述
- 每日一题 - 240117 - B. Bus of Characters
- Pandas.Series.mean() 平均值 详解 含代码 含测试数据集 随Pandas版本持续更新
- AspectJWeaver之Gadget分析