ros2仿真学习04 -turtlebot3实现cartographer算法建图演示
发布时间:2024年01月18日
安装看这里
https://blog.csdn.net/hai411741962/article/details/135619608?spm=1001.2014.3001.5502
虚拟机配置:
内存16g
cpu 4 核
磁盘40G,20G 不够
启动仿真
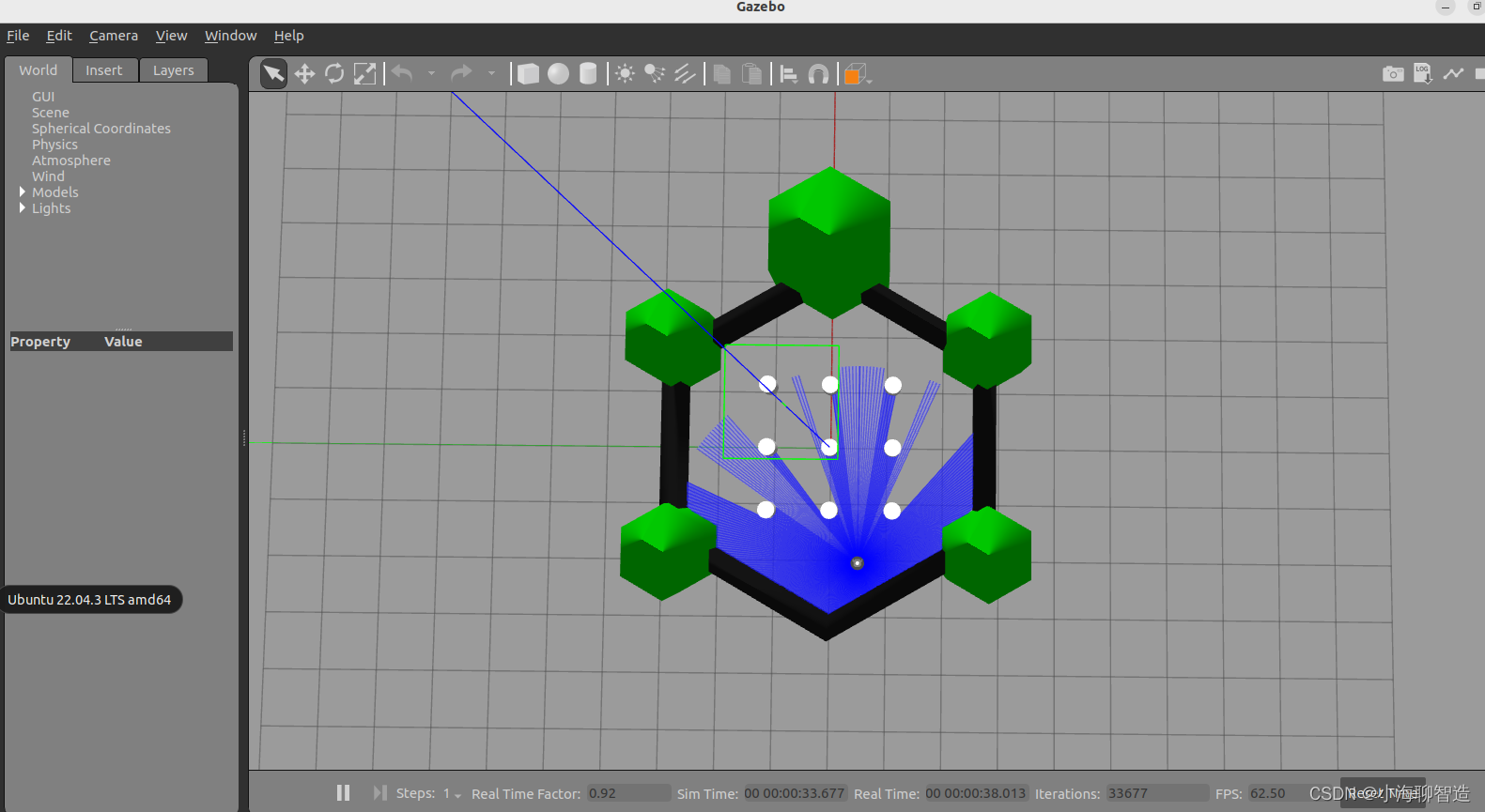
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
启动成功如下
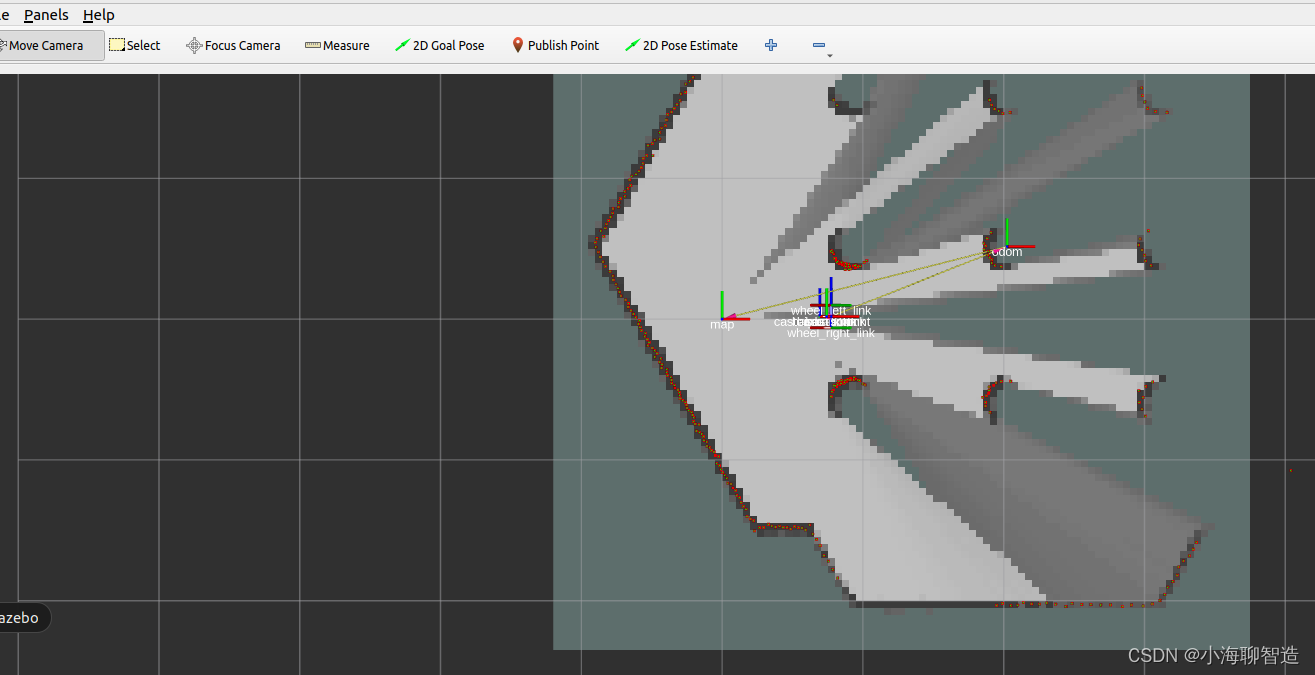
启动建图
重新开一个命令窗口:
ros2 launch turtlebot3_cartographer cartographer.launch.py use_sim_time:=True
启动成功后如下图

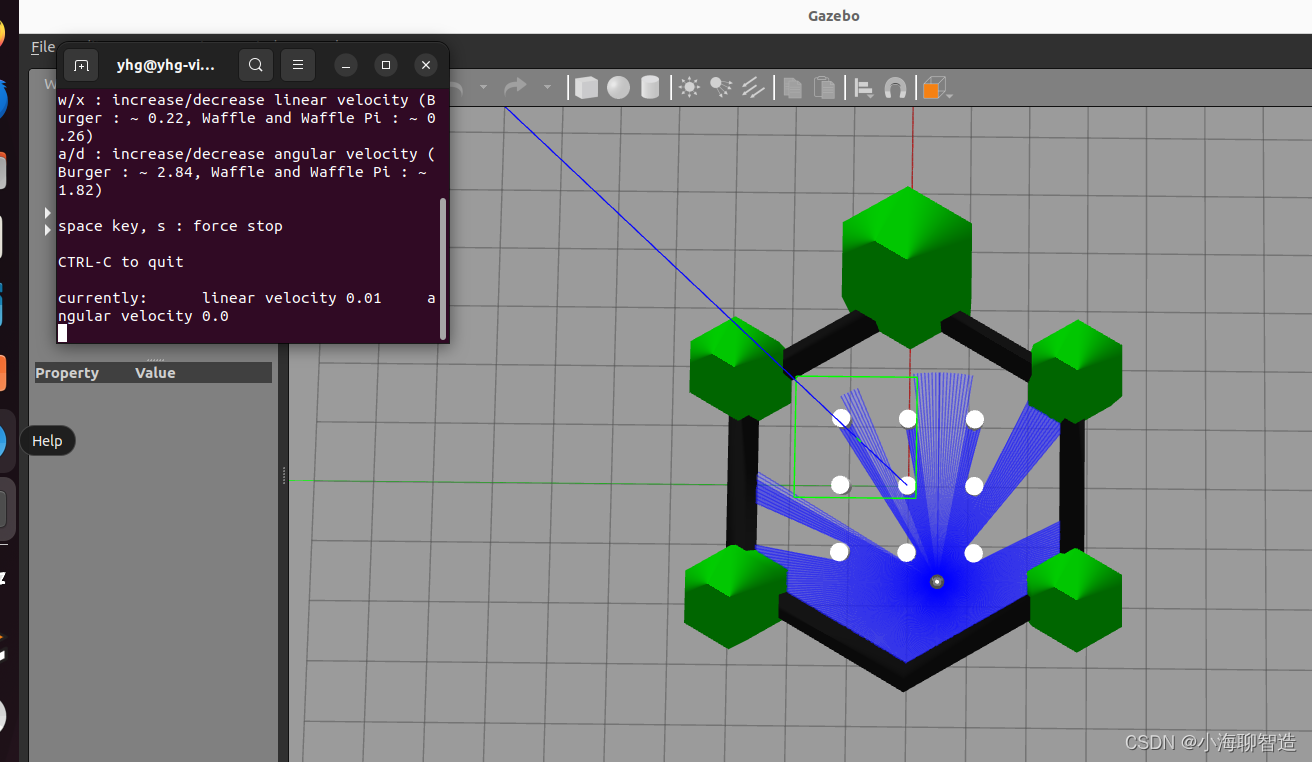
启动键盘
再开一个命令窗口输入
ros2 run turtlebot3_teleop teleop_keyboard
保持命令窗口在前,缩小操作键盘,可看到Gazebo 和 Rviz 的小车分别都在动了,也可以打开topic list 查看多了好些个topic
按下 w 就开始了
建图完成后,保存地图
保存地图
mkdir ~/map
ros2 run nav2_map_server map_saver_cli -f ~/map
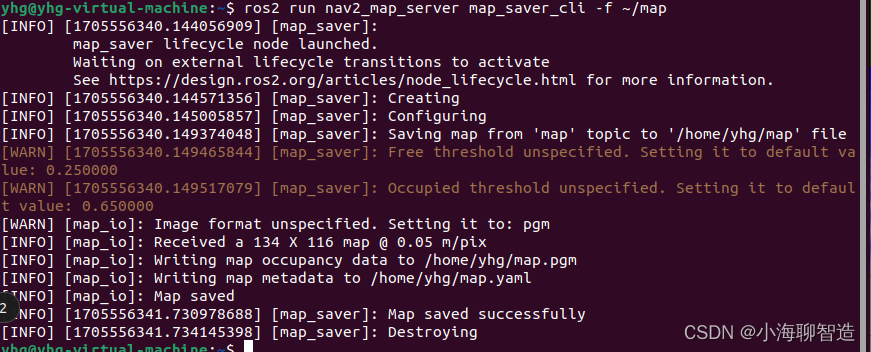
地图保存在~下,名为map.yaml,map.pgm
查看地图
eog ~/map.pgm
文章来源:https://blog.csdn.net/hai411741962/article/details/135671803
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- py连接sqlserver数据库报错问题处理。20009
- 设计模式——状态模式
- Java工厂模式详解
- 第二证券:市场结构性行情延续 关注科技成长等板块
- EMD、EEMD、FEEMD、CEEMD、CEEMDAN的区别、原理和Python实现(二)EEMD
- 【算法与数据结构】416、LeetCode分割等和子集
- Web实战丨基于django+html+css+js的电子商务网站
- STM32-ADC模数转换器
- python文本文件和二进制文件的使用
- 深度学习|10.2 边缘检测示例 10.3 更多边缘检测