FreeRTOS之队列集操作(实践)
发布时间:2023年12月22日
? ? 多个任务在在同一队列中传递的同一种数据类型,而队列集能够在任务之间传递不同的数据类型。
配置流程:(更详细流程参考正点原子的教程)
1、启用队列集将configUSE_QUEUE_SETA置1)
2、创建队列集
3、创建队列或信号量
4、往队列集添加队列或信号量
5、往队列发送信息及信号量
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "FreeRTOS.h"
#include "task.h"
#include "sys.h"
#include "semphr.h"
#include "queue.h"
/****************************************************
STM32F103C8T6单片机freertos移植实验
作者:KJX
时间:2023-12-22
*****************************************************/
//优先级
#define START_TASK_PRIO 1
//堆栈大小
#define START_STK_SIZE 128
//任务函数
void start_task(void * pvParameters);
//任务句柄
TaskHandle_t StartTask_Handler;
//task1优先级
#define TASK1_TASK_PRIO 3
//task1堆栈大小
#define TASK1_STK_SIZE 128
//task1函数声明
void task1_task(void * pvParameters);
//task1任务句柄
TaskHandle_t Task1Task_Handler;
//task2优先级
#define TASK2_TASK_PRIO 2
//task2堆栈大小
#define TASK2_STK_SIZE 128
//task2函数声明
void task2_task(void * pvParameters);
//task2任务句柄
TaskHandle_t Task2Task_Handler;
//相关信号量
QueueSetHandle_t queueset_handle;
QueueHandle_t queue_handle;
QueueHandle_t semphr_handle;
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);
delay_init();
uart_init(9600);
LED_Init();
LED0=0;
xTaskCreate((TaskFunction_t ) start_task, //指向任务函数的指针,必须为第一个
(char * ) "start_task", //任务名字
(uint16_t ) START_STK_SIZE, //任务堆栈大小,字为单位
(void * ) NULL, //传递给任务函数的参数
(UBaseType_t ) START_TASK_PRIO,//任务优先级,数值大,则优先级大
(TaskHandle_t * ) &StartTask_Handler);//任务句柄(控制块)
vTaskStartScheduler();//开启任务调度
}
//开始任务
//返回值为pdPASS则创建任务成功
void start_task(void * pvParameters)
{
taskENTER_CRITICAL();//进入临界区,创建任务完成后,才开始执行优先级任务
//队列集相关
queueset_handle=xQueueCreateSet(2);//创建数列集,可存放2个队列
if(queueset_handle!= NULL)
{
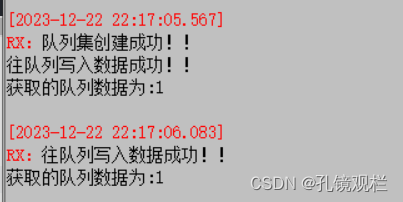
printf("队列集创建成功!!\r\n");
}
queue_handle = xQueueCreate(1,sizeof(uint8_t));//创建队列
semphr_handle = xSemaphoreCreateBinary();//创建二值信号量
//加入队列集
xQueueAddToSet(queue_handle,queueset_handle);
xQueueAddToSet(semphr_handle,queueset_handle);
//创建Task1
xTaskCreate((TaskFunction_t ) task1_task,
(char * ) "task1_task",
(uint16_t ) TASK1_STK_SIZE,
(void * ) NULL,
(UBaseType_t ) TASK1_TASK_PRIO,
(TaskHandle_t * ) &Task1Task_Handler);
//创建Task2
xTaskCreate((TaskFunction_t ) task2_task,
(char * ) "task2_task",
(uint16_t ) TASK2_STK_SIZE,
(void * ) NULL,
(UBaseType_t ) TASK2_TASK_PRIO,
(TaskHandle_t * ) &Task2Task_Handler);
vTaskDelete(StartTask_Handler);//删除开始任务,删除自身用NULL
taskEXIT_CRITICAL();//退出临界区
}
//任务一,队列发送及信号量释放
void task1_task(void * pvParameters)
{
uint8_t key=1;
BaseType_t err;
while(1)
{
if(key==1)
{
err=xQueueSend(queue_handle,&key,portMAX_DELAY);
if(err==pdPASS)
{
printf("往队列写入数据成功!!\r\n");
}
}else if(key==2)
{
err=xSemaphoreGive(semphr_handle);
if(err==pdPASS)
{
printf("释放信号量成功!!\r\n");
}
}
vTaskDelay(10);
}
}
//任务二,获取队列信息
void task2_task(void * pvParameters)
{
QueueSetMemberHandle_t member_handle;
uint8_t key;
while(1)
{
member_handle = xQueueSelectFromSet(queueset_handle,portMAX_DELAY);
if(member_handle == queue_handle)
{
xQueueReceive(member_handle,&key,portMAX_DELAY);
printf("获取的队列数据为:%d\r\n",key);
}else if(member_handle==semphr_handle )
{
xSemaphoreTake(member_handle,portMAX_DELAY);
printf("获取信号量成功!!\r\n");
}
}
}
文章来源:https://blog.csdn.net/m0_67069564/article/details/135162122
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 企鹅目标检测数据集VOC格式400张
- 【Java基础系列】body参数前后端不一致
- 常用Java代码-Java中的多线程编程(Multi-threading)
- 打开”是用open还是turn on?
- EasyRecovery2024电脑数据恢复工具好不好用?
- TreeMap
- 大话 JavaScript(Speaking JavaScript):第二十一章到第二十五章
- 【sgTree】自定义组件:加载el-tree树节点整棵树数据,实现增删改操作。
- 15个主流设计灵感网站,激发你的创作灵感!
- 【淘宝API开发系列】实现批量抓取淘宝商品,店铺数据(可高并发)