通过旋转机械臂,将机械臂上相机拍摄图像的任意点移动至图像中心的方法
发布时间:2024年01月16日
计算原理
角度计算
-
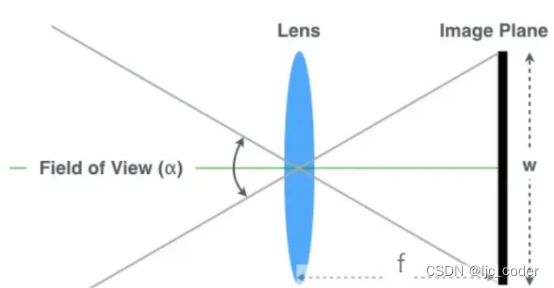
相机CCD大小固定,即相机成像平面大小固定,相机视场角(FOV)仅由相机焦距F决定;
- 因此,定焦相机的FOV大小固定,通过上图可以看出相机视场角的计算公式为:
FOV = 2*atan(w/2f) - 注意,这里w/2f代表的是w/2除以f;
-
因此,要想获取图像上任意点(x0,x0)到图像中心的旋转角度,只需求出任意点在成像画面中与图像中心(x1,x2)在x、y方向上的距离差作为新的w即可,但需注意x轴方向的差对应的是y轴的旋转角度,其余类似,如下式:
机械臂位姿计算
- 已知两个旋转角度,将其转化为旋转矩阵R_x、R_y;
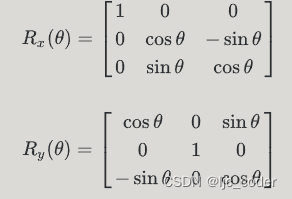
- 左乘机械臂当前位姿矩阵,即可获取机械臂到达中心点的机械臂位姿即:
文章来源:https://blog.csdn.net/m0_52785249/article/details/135618686
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 测评自养号:如何通过销量数据优化阿里国际、eBay产品策略
- shell,对输出的结果去掉空格和换行符号,grep忽略特定字符
- nginx配置https( Windows Server)
- 基于PostGIS实现本地矢量切片服务,通过mapboxgl来进行服务渲染
- 北大题库2.5-1700:八皇后问题
- 前缀和算法 -- [模版]一维前缀和
- 网络技术基础与计算思维实验教程_3.2_无线局域网与以太网互连实验
- CMake入门教程【核心篇】属性管理set_property和get_property
- Java开发框架和中间件面试题(9)
- [算法基础学习] 单调栈和单调队列