问题的出现与解决思路
之前写过大致一个线预测与跟踪的代码,大致是这个样子。
1.最初测试版本
使用的是kalman滤波进行跟踪,下面的代码是我自己写的最初测试代码。
kalman_lines.h:我这里只写了一个函数,直接将将这个函数进行一个引入便可以
#pragma once
#include <opencv2/opencv.hpp>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <vector>
using namespace cv;
using namespace std;
void kalman_line(VideoCapture video, Mat frame, vector<Vec2f> lines, float slope, float intercept);kalman_lines.cpp:函数的实现
#include "kalman_lines.h"
#include <vector>
using namespace std;
void kalman_line(VideoCapture video, Mat frame, vector<Vec2f> lines, float slope, float intercept)
{
// 创建Kalman滤波器对象
KalmanFilter kf(4, 2, 0);
Mat state(4, 1, CV_32F); // x, y, vx, vy
Mat measurement = Mat::zeros(2, 1, CV_32F); // mx, my
// 设置Kalman滤波器初始状态
kf.transitionMatrix = (Mat_<float>(4, 4) << 1, 0, 1, 0, 0, 1, 0, 1, 0, 0, 1, 0, 0, 0, 0, 1);
setIdentity(kf.measurementMatrix);
setIdentity(kf.processNoiseCov, Scalar::all(1e-4));
setIdentity(kf.measurementNoiseCov, Scalar::all(1e-1));
setIdentity(kf.errorCovPost, Scalar::all(1));
// 选择特定斜率与截距的直线进行追踪
for (size_t i = 0; i < lines.size(); i++)
{
float rho = lines[i][0];
float theta = lines[i][1];
if (abs(theta) < CV_PI / 4 || abs(theta - CV_PI / 2) < CV_PI / 4)
{
float a = cos(theta);
float b = sin(theta);
float x0 = a * rho;
float y0 = b * rho;
Point pt1(cvRound(x0 + 1000 * (-b)), cvRound(y0 + 1000 * (a)));
Point pt2(cvRound(x0 - 1000 * (-b)), cvRound(y0 - 1000 * (a)));
float current_slope = (pt2.y - pt1.y) / (float)(pt2.x - pt1.x);
float current_intercept = pt1.y - current_slope * pt1.x;
if (abs(current_slope - slope) < 0.2 && abs(current_intercept - intercept) < 100)
{
slope = current_slope;
intercept = current_intercept;
// 更新Kalman滤波器初始状态
state.at<float>(0) = intercept;
state.at<float>(1) = slope;
kf.statePre.at<float>(0) = intercept;
kf.statePre.at<float>(1) = slope;
}
}
}
Mat gray, edges;
// 视频帧循环处理
while (true)
{
// 读取下一帧图像
video >> frame;
// 检查是否到达视频末尾
if (frame.empty())
break;
// 预测下一状态
Mat prediction = kf.predict();
// 提取当前帧直线
cvtColor(frame, gray, COLOR_BGR2GRAY);
Canny(gray, edges, 50, 150, 3);
std::vector<Vec2f> lines;
HoughLines(edges, lines, 1, CV_PI / 180, 100);
// 选择最接近预测斜率与截距的直线进行追踪
float min_distance = FLT_MAX;
float closest_slope = 0.0;
float closest_intercept = 0.0;
for (size_t i = 0; i < lines.size(); i++)
{
float rho = lines[i][0];
float theta = lines[i][1];
if (abs(theta) < CV_PI / 4 || abs(theta - CV_PI / 2) < CV_PI / 4)
{
float a = cos(theta);
float b = sin(theta);
float x0 = a * rho;
float y0 = b * rho;
Point pt1(cvRound(x0 + 1000 * (-b)), cvRound(y0 + 1000 * (a)));
Point pt2(cvRound(x0 - 1000 * (-b)), cvRound(y0 - 1000 * (a)));
float current_slope = (pt2.y - pt1.y) / (float)(pt2.x - pt1.x);
float current_intercept = pt1.y - current_slope * pt1.x;
float distance = sqrt(pow(current_slope - prediction.at<float>(1), 2) + pow(current_intercept - prediction.at<float>(0), 2));
if (distance < min_distance)
{
min_distance = distance;
closest_slope = current_slope;
closest_intercept = current_intercept;
}
}
}
// 更新Kalman滤波器状态
Mat measurement(2, 1, CV_32F);
measurement.at<float>(0) = closest_intercept;
measurement.at<float>(1) = closest_slope;
kf.correct(measurement);
// 绘制预测线和测量线
float slope_pred = kf.statePost.at<float>(1);
float intercept_pred = kf.statePost.at<float>(0);
float slope_meas = closest_slope;
float intercept_meas = closest_intercept;
Point pt1_pred(0, intercept_pred);
Point pt2_pred(frame.cols, slope_pred * frame.cols + intercept_pred);
Point pt1_meas(0, intercept_meas);
Point pt2_meas(frame.cols, slope_meas * frame.cols + intercept_meas);
line(frame, pt1_pred, pt2_pred, Scalar(0, 255, 0), 2);
line(frame, pt1_meas, pt2_meas, Scalar(0, 0, 255), 2);
imshow("Video", frame);
// 检测键盘按下
if (waitKey(30) == 27)
{
break;
}
}
}main主函数:
#include <opencv2/opencv.hpp>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include "kalman_lines.h"
using namespace cv;
int main()
{
// 打开视频文件
VideoCapture video("test1.mp4");
// 检查视频是否成功打开
if (!video.isOpened())
{
std::cout << "无法打开视频文件" << std::endl;
return -1;
}
// 创建窗口,用于显示视频帧
namedWindow("Video", WINDOW_NORMAL);
// 获取第一帧图像
Mat frame;
video >> frame;
// 提取第一帧的直线
Mat gray, edges;
cvtColor(frame, gray, COLOR_BGR2GRAY);
Canny(gray, edges, 50, 150, 3);
std::vector<Vec2f> lines;
HoughLines(edges, lines, 1, CV_PI / 180, 100);
kalman_line(video, frame,lines,1.0,0.0);
return 0;
}我是直接打印了一个图纸,图纸上只有一条直线进行预测与跟踪,使用手机拍摄视频。情况如下所示:
20240107test1
问题的出现:可以见到视频之中的跟踪效果并不是特别的好,出现了红色线条是水平的情况。
2.改进版本一:针对斜率与截距的思考
最初的测试版本之中,直线的跟踪效果出现了水平线的情况。我的猜想是在进行预测输入判断的地方出现了错误如下所示:

我一开始也没有往这个方向去想,但是后来反复观看测试代码,看到直线是在标准竖直的情况下,就会出现追踪出错的情况,如下图所示的三条直线。
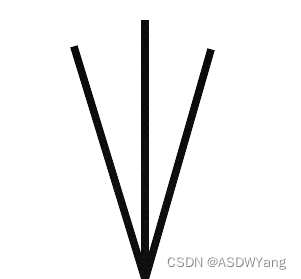
这三条直线的斜率分别为正、无穷、负的,当出现接近竖直情况下就会出现,出现斜率正无穷与负无穷的情况,当直线此刻发生状态变化变出现了跟踪错误的情况。所以这个地方的判断标准之中使用斜率与截距是不合适的。
解决方案:
方案一:使极坐标表示直线便可以规避使用斜率出现问题的影响。
方案二:将原始的坐标轴进行对换,也就是原始的x轴变成了y轴,原始的y轴变成了x轴。由于本次项目的是要测量接近于竖直的情况,因此,第二种方案会更加简便一点。
因此原始代码之中需要将y=kx+b换成x=ky+b:


并且需要将这个判断条件进行去除,
![]()
再次运行程序,
矫正1
3.改进版本二:针对跟踪效果的思考
可以见到改进版本一之中的跟踪不会出现错误的线的问题,但是出现的跟踪与预测的效果并不是很好,预测的线条偏离的太多。
猜想是设定的初始值是出现了问题,参考论文《基于机器视觉的车道线检测与跟踪关键技术研究》之中给出初始矩阵最佳初值进行设定。

再次运行程序,可以见到跟踪与预测的结果好了很多,
矫正2
问题的出现原因分析:
①关于这个地方的直线跟踪的时候,我只是测试了一条直线,这个地方出错的原因是图像运动太快了并且相应的直线太细,导致运动过程之中出现了一点小问题,但是并不影响实际的使用。实际图像之中线条并不是如上所示,所以需要进一步的调优。
②kalman滤波是线性滤波并不是非线性滤波,所以对于处理线性预测是最佳的,而对于这种非线性跟踪并不是最佳方式,这里只是进行一个测试
4.加入干扰直线进行测试
矫正3
5.加入手动选取跟踪过程
#include "kalman_lines.h"
#include <vector>
using namespace std;
bool first_flag = true;
void kalman_line(VideoCapture video, Mat frame, vector<Vec2f> lines, float rho1, float theta1)
{
// 创建Kalman滤波器对象
KalmanFilter kf(4, 2, 0);
Mat state(4, 1, CV_32F); // x, y, vx, vy
Mat measurement = Mat::zeros(2, 1, CV_32F); // mx, my
// 设置Kalman滤波器初始状态
kf.transitionMatrix = (Mat_<float>(4, 4) << 1, 0, 1, 0, 0, 1, 0, 1, 0, 0, 1, 0, 0, 0, 0, 1);
kf.measurementMatrix = (Mat_<float>(2, 4) << 1, 0, 0, 0, 0, 1, 0, 0);
setIdentity(kf.processNoiseCov, Scalar::all(0.409));
setIdentity(kf.measurementNoiseCov, Scalar::all(0.801));
setIdentity(kf.errorCovPost, Scalar::all(1));
Mat gray, edges;
// 视频帧循环处理
while (true)
{
// 读取下一帧图像
video >> frame;
// 检查是否到达视频末尾
if (frame.empty())
break;
// 预测下一状态
Mat prediction = kf.predict();
// 提取当前帧直线
cvtColor(frame, gray, COLOR_BGR2GRAY);
Canny(gray, edges, 50, 150, 3);
std::vector<Vec2f> lines;
HoughLines(edges, lines, 1, CV_PI / 180, 100);
// 选择最接近预测斜率与截距的直线进行追踪
float min_distance = FLT_MAX;
float closest_slope = 0.0;
float closest_intercept = 0.0;
if (first_flag == true)
{
float a = cos(theta1);
float b = sin(theta1);
float x0 = a * rho1;
float y0 = b * rho1;
Point pt1(cvRound(x0 + 1000 * (-b)), cvRound(y0 + 1000 * (a)));
Point pt2(cvRound(x0 - 1000 * (-b)), cvRound(y0 - 1000 * (a)));
float current_slope = (float)(pt2.x - pt1.x) / (float)(pt2.y - pt1.y);
float current_intercept = pt1.x - current_slope * pt1.y;
float distance = sqrt(0.8*pow(current_slope - prediction.at<float>(1), 2) + 0.2*pow(current_intercept - prediction.at<float>(0), 2));
if (distance < min_distance)
{
min_distance = distance;
closest_slope = current_slope;
closest_intercept = current_intercept;
}
first_flag = false;
}
else
{
for (size_t i = 0; i < lines.size(); i++)
{
float rho = lines[i][0];
float theta = lines[i][1];
float a = cos(theta);
float b = sin(theta);
float x0 = a * rho;
float y0 = b * rho;
Point pt1(cvRound(x0 + 1000 * (-b)), cvRound(y0 + 1000 * (a)));
Point pt2(cvRound(x0 - 1000 * (-b)), cvRound(y0 - 1000 * (a)));
//x = ky + b
float current_slope = (float)(pt2.x - pt1.x) / (float)(pt2.y - pt1.y);
float current_intercept = pt1.x - current_slope * pt1.y;
float distance = sqrt(0.8*pow(current_slope - prediction.at<float>(1), 2) + 0.2*pow(current_intercept - prediction.at<float>(0), 2));
if (distance < min_distance)
{
min_distance = distance;
closest_slope = current_slope;
closest_intercept = current_intercept;
}
}
}
// 更新Kalman滤波器状态
Mat measurement(2, 1, CV_32F);
measurement.at<float>(0) = closest_intercept;
measurement.at<float>(1) = closest_slope;
kf.correct(measurement);
float slope_pred = 0.0;
float intercept_pred = 0.0;
/*
if (first_flag == true)
{
slope_pred = closest_slope;
intercept_pred = closest_intercept;
first_flag = false;
}
else
{*/
slope_pred = kf.statePost.at<float>(1);
intercept_pred = kf.statePost.at<float>(0);
// 绘制预测线和测量线
float slope_meas = closest_slope;
float intercept_meas = closest_intercept;
Point pt1_pred(intercept_pred,0);
Point pt2_pred( slope_pred * frame.cols + intercept_pred, frame.cols);
Point pt1_meas(intercept_meas, 0);
Point pt2_meas(slope_meas * frame.cols + intercept_meas, frame.cols);
line(frame, pt1_pred, pt2_pred, Scalar(0, 255, 0), 2);
line(frame, pt1_meas, pt2_meas, Scalar(0, 0, 255), 2);
imshow("Video", frame);
// 检测键盘按下
if (waitKey(30) == 27)
{
break;
}
}
}#include <opencv2/opencv.hpp>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include "kalman_lines.h"
using namespace cv;
float quanju_rho, quanju_theta;
Mat frame;
vector<Vec2f> lines;
//点到直线的距离公式
double distanceToLine(Point a1, Point pt1, Point pt2)
{
double x1 = pt1.x;
double y1 = pt1.y;
double x2 = pt2.x;
double y2 = pt2.y;
double x0 = a1.x;
double y0 = a1.y;
double distance = abs((y2 - y1) * x0 - (x2 - x1) * y0 + x2 * y1 - y2 * x1) / sqrt(pow(y2 - y1, 2) + pow(x2 - x1, 2));
return distance;
}
// 鼠标回调函数
void onMouse(int event, int x, int y, int flags, void* userdata) {
if (event == EVENT_LBUTTONDOWN) {
// 计算每条直线与点击点的距离,并选择最接近的直线
float minDistance = numeric_limits<float>::max();
int closestLine;
for (size_t i = 0; i < lines.size(); i++)
{
float rho = lines[i][0];
float theta = lines[i][1];
double a = cos(theta);
double b = sin(theta);
double x0 = a * rho;
double y0 = b * rho;
Point pt1(cvRound(x0 + 1000 * (-b)), cvRound(y0 + 1000 * (a)));
Point pt2(cvRound(x0 - 1000 * (-b)), cvRound(y0 - 1000 * (a)));
//line(frame, pt1, pt2, Scalar(0, 125, 125), 5, LINE_AA);
float distance = abs((pt1.x + pt2.x)/2.0 - x)+ abs((pt1.y + pt2.y) / 2.0 - y);
if (distance < minDistance) {
minDistance = distance;
closestLine = i;
}
}
for (size_t i = 0; i < lines.size(); i++)
{
if (i == closestLine)
{
float rho = lines[i][0];
float theta = lines[i][1];
quanju_rho = rho;
quanju_theta = theta;
double a = cos(theta);
double b = sin(theta);
double x0 = a * rho;
double y0 = b * rho;
Point pt1(cvRound(x0 + 1000 * (-b)), cvRound(y0 + 1000 * (a)));
Point pt2(cvRound(x0 - 1000 * (-b)), cvRound(y0 - 1000 * (a)));
line(frame, pt1, pt2, Scalar(0, 125, 125), 5, LINE_AA);
}
}
// 显示图像
imshow("Frame", frame);
}
}
int main()
{
// 打开视频文件
VideoCapture video("追踪线.mp4");
// 检查视频是否成功打开
if (!video.isOpened())
{
std::cout << "无法打开视频文件" << std::endl;
return -1;
}
// 创建窗口,用于显示视频帧
//namedWindow("frame", WINDOW_NORMAL);
// 获取第一帧图像
//Mat frame;
video >> frame;
// 提取第一帧的直线
Mat gray, edges;
cvtColor(frame, gray, COLOR_BGR2GRAY);
Canny(gray, edges, 50, 150, 3);
//std::vector<Vec2f> lines;
HoughLines(edges, lines, 1, CV_PI / 180, 100);
/*
// 在图像上绘制检测到的线条
for (size_t i = 0; i < lines.size(); i++)
{
float rho = lines[i][0];
float theta = lines[i][1];
double a = cos(theta);
double b = sin(theta);
double x0 = a * rho;
double y0 = b * rho;
Point pt1(cvRound(x0 + 1000 * (-b)), cvRound(y0 + 1000 * (a)));
Point pt2(cvRound(x0 - 1000 * (-b)), cvRound(y0 - 1000 * (a)));
line(frame, pt1, pt2, Scalar(0, 0, 255), 3, LINE_AA);
}*/
namedWindow("Frame");
imshow("Frame", frame);
setMouseCallback("Frame", onMouse);
waitKey(5000);
namedWindow("Video", WINDOW_NORMAL);
kalman_line(video, frame, lines, quanju_rho, quanju_theta);
return 0;
}追踪1
上述代码不是最优的方式,需要进一步调参。
6.对于跟踪的再度思考
如果之中的杂线过多,需要对于物体进行一个粗跟踪,然后再去跟踪确切的直线,我这里的思路是使用了Staple目标跟踪算法,这是一种结合局部特征HOG和全局特征颜色进行跟踪的代码。
我查到大神的代码:GitHub - xuduo35/STAPLE: C++ implementation of staple algorithm for object tracking.
但是上述的代码是将图像作为一个训练集,并且相应的特征的选取是将已知的特征处使用像素点的方式给定的,我将上述代码的主函数进行了更改,使用拉框的方式进行选取想要跟踪的物体,直接跟踪视频之中的物体,并且将视频之中将来的出现的匹配出作为训练集。相应的主函数如下所示:
#include "staple_tracker.hpp"
#include <iostream>
#include <vector>
#include <string>
#include <fstream>
#include <numeric>
#include <opencv2/opencv.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
cv::Rect_<float> getAxisAlignedBB(std::vector<cv::Point2f> polygon);
std::vector<cv::Rect_<float>> getgroundtruth(std::string txt_file);
void on_MouseHandle(int event, int x, int y, int flags, void* param);
bool drawing_finished = false;
bool drawing_box = false;
cv::Rect groundtruth_rect;
bool mouse_move = false;
int count = 0;
int main(int argc, char * argv[]) {
// 数据定义
STAPLE_TRACKER staple; //创建staple跟踪对象
std::vector<cv::Rect_<float>> result_rects; //创建矩形容器,存储所有算法识别出的跟踪框
cv::VideoCapture capture("追踪.mp4"); //创建VideoCapture类
cv::Mat image; //用来存储每一帧
cv::Mat tempImage; //每一帧的临时变量
int64 tic, toc; //算法运行时间起始点与终止点
double time = 0;
bool show_visualization = true;
bool first_image = true;
// 设置鼠标操作回调函数
cv::namedWindow("STAPLE");
cv::setMouseCallback("STAPLE", on_MouseHandle, (void*)&image);
//注意不加这句话会出现问题
double fps = capture.get(cv::CAP_PROP_FPS); // 获取视频的帧率
int delay = 100000 / fps; // 计算每一帧的延迟时间
while (1) {
count++;
capture.read(image); //逐帧读取视频
if (image.empty()) { //如果视频结束或未检测到摄像头则跳出循环
break;
}
if (drawing_finished == false) {
// 鼠标按下drawing_box=true,在视频画面frame上画矩形
if (drawing_box) {
tempImage.copyTo(image);
cv::rectangle(image, groundtruth_rect.tl(), groundtruth_rect.br(), cv::Scalar(0, 0, 255));// 画框
}
else {
image.copyTo(tempImage);//拷贝源图到临时变量
}
}
else {
// 如果是第一帧图像,则进行staple初始化操作,反之则只更新staple
if (first_image) {
// staple初始化操作
staple.tracker_staple_initialize(image, groundtruth_rect);
// staple目标追踪
staple.tracker_staple_train(image, true);
first_image = false;
}
groundtruth_rect = staple.tracker_staple_update(image);
staple.tracker_staple_train(image, false);
}
//当然时间果断不利于选框,当然也有更好的方式进行选框,可以自己改
if (count < 3)
{
//用于选框
cv::waitKey(delay*1.0);
}
else
{
cv::waitKey(delay / 100);
}
// 可视化部分
if (show_visualization) {
// 显示算法识别的跟踪框
cv::rectangle(image, groundtruth_rect, cv::Scalar(0, 128, 255), 2);
// 输出图像显示结果
cv::imshow("STAPLE", image);
std::cout << "Center: [" << groundtruth_rect.tl().x + groundtruth_rect.width / 2 << ", " << groundtruth_rect.tl().y + groundtruth_rect.height / 2 << "]" << std::endl;
char key = cv::waitKey(10);
if (key == 27 || key == 'q' || key == 'Q')
break;
}
}
cv::destroyAllWindows();
}
// 使轴对齐
cv::Rect_<float> getAxisAlignedBB(std::vector<cv::Point2f> polygon)
{
double cx = double(polygon[0].x + polygon[1].x + polygon[2].x + polygon[3].x) / 4.;
double cy = double(polygon[0].y + polygon[1].y + polygon[2].y + polygon[3].y) / 4.;
double x1 = std::min(std::min(std::min(polygon[0].x, polygon[1].x), polygon[2].x), polygon[3].x);
double x2 = std::max(std::max(std::max(polygon[0].x, polygon[1].x), polygon[2].x), polygon[3].x);
double y1 = std::min(std::min(std::min(polygon[0].y, polygon[1].y), polygon[2].y), polygon[3].y);
double y2 = std::max(std::max(std::max(polygon[0].y, polygon[1].y), polygon[2].y), polygon[3].y);
double A1 = norm(polygon[1] - polygon[2])*norm(polygon[2] - polygon[3]);
double A2 = (x2 - x1) * (y2 - y1);
double s = sqrt(A1 / A2);
double w = s * (x2 - x1) + 1;
double h = s * (y2 - y1) + 1;
cv::Rect_<float> rect(cx - 1 - w / 2.0, cy - 1 - h / 2.0, w, h);
return rect;
}
// 获取groundtruth内的矩形坐标
std::vector<cv::Rect_<float>> getgroundtruth(std::string txt_file)
{
std::vector<cv::Rect_<float>> rects;
std::ifstream gt;
gt.open(txt_file.c_str());
if (!gt.is_open())
std::cout << "Ground truth file " << txt_file
<< " can not be read" << std::endl;
std::string line;
float x1, y1, x2, y2, x3, y3, x4, y4;
while (getline(gt, line)) {
std::replace(line.begin(), line.end(), ',', ' ');
std::stringstream ss;
ss.str(line);
ss >> x1 >> y1 >> x2 >> y2 >> x3 >> y3 >> x4 >> y4;
std::vector<cv::Point2f>polygon;
polygon.push_back(cv::Point2f(x1, y1));
polygon.push_back(cv::Point2f(x2, y2));
polygon.push_back(cv::Point2f(x3, y3));
polygon.push_back(cv::Point2f(x4, y4));
rects.push_back(getAxisAlignedBB(polygon)); //0-index
}
gt.close();
return rects;
}
// 第一帧画框鼠标响应
void on_MouseHandle(int event, int x, int y, int flags, void* param) {
cv::Mat& image = *(cv::Mat*) param;
switch (event)
{
//鼠标移动消息
case cv::EVENT_MOUSEMOVE:
{
if (drawing_box)//如果是否进行绘制的标识符为真,则记录下长和宽到RECT型变量中
{
groundtruth_rect.width = x - groundtruth_rect.x;
groundtruth_rect.height = y - groundtruth_rect.y;
}
}
break;
//左键按下消息
case cv::EVENT_LBUTTONDOWN:
{
mouse_move = true;
drawing_box = true;
groundtruth_rect = cv::Rect(x, y, 0, 0);//记录起始点
}
break;
//左键抬起消息
case cv::EVENT_LBUTTONUP:
{
drawing_box = false;//置标识符为false
drawing_finished = true;
//对宽和高小于0的处理
if (groundtruth_rect.width < 0)
{
groundtruth_rect.x += groundtruth_rect.width;
groundtruth_rect.width *= -1;
}
if (groundtruth_rect.height < 0)
{
groundtruth_rect.y += groundtruth_rect.height;
groundtruth_rect.height *= -1;
}
//调用函数进行绘制
cv::rectangle(image, groundtruth_rect.tl(), groundtruth_rect.br(), cv::Scalar(0, 0, 255));// 画框
}
break;
}
}
可以见到跟踪的过程是比较好的,在实际的跟踪的过程之中可以使用首选粗选取物体,然后再精确跟踪的过程,当然这个过程最适合于背景特别特别复杂、干扰特别多的情况,若是干扰没那么多,后面这个物体跟踪便不用使用。这就是自己的一个大致思路。
跟踪物体
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 阿里云购买云服务器选择经济型、通用算力型、计算型、通用型、内存型实例哪个好?
- 如何把硬盘(分区)一分为二?重装系统的小伙伴不可不看
- 哪种猫粮比较好?怎样囤性价比高的主食冻干品牌 ?
- MySQL主从复制与读写分离
- Vim中取消高亮显示的文本
- 图形化编程:Scratch与Mind+的探索之旅
- 「环境配置」使用Windows自带工具清理C盘空间
- Windows10下 tensorflow-gpu 配置
- LeetCode 14 最长公共前缀
- 基于SpringBoot的洗衣店管理系统