一阶低通滤波器
发布时间:2024年01月12日
一阶低通滤波器

X为输入,Y为滤波后得到的输出值;本次的输出结果主要取决于上次的滤波输出值,其中a是和滤波效果有关的一个参数,称为滤波系数;它决定新采样值在本次滤波结果中所占的权重;

滤波系数a越小,滤波结果越平稳,但是灵敏度低;
滤波系数a越大,滤波结果越不稳定,但是灵敏度高;
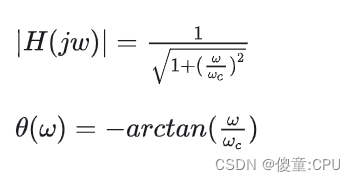
从幅值函数中可以看出:
当输入信号的频率小于截止频率时,幅值基本等于1,也就是输入信号能基本还原出有用信号的状态;
当输入信号的频率大于截止频率时,幅值就迅速小于1了,也就达到了衰减高频干扰信号的目的;
从相角函数中可以看出:
随着输入信号的频率的不断增大,输入信号的相位不断滞后,
当输入信号的频率等于截止频率时,相位滞后45度,
当输入信号的频率远大于截止频率时,相位滞后90度。
带宽截止频率的设计

相移设计

采样周期的选取

例子

#include <stdio.h>
#include <stdlib.h>
#include <math.h>
#define PI 3.14159265358979323846
//input 当前输入信号
//prev_output 上一个输出信号
//prev_input 上一个输入信号
//cutoff_freq 截止频率
//sample_rate 采样频率
double filter(double input, double prev_output, double prev_input, double cutoff_freq, double sample_rate) {
double RC = 1.0 / (2.0 * PI * cutoff_freq);
double alpha = 1.0 / (1.0 + RC * sample_rate);
double output = alpha * (input + prev_input) + (1 - alpha) * prev_output;
return output;
}
int main() {
double input_signal[] = {1.0, 2.0, 3.0, 4.0, 5.0, 6.0, 7.0, 8.0, 9.0, 10.0};
double output_signal[10];
double prev_output = 0.0;
double prev_input = 0.0;
double cutoff_freq = 10.0; // 11Hz
double sample_rate = 10000.0; // 10 kHz
int i;
for (i = 0; i < 10; i++) {
output_signal[i] = filter(input_signal[i], prev_output, prev_input, cutoff_freq, sample_rate);
prev_output = output_signal[i];
prev_input = input_signal[i];
}
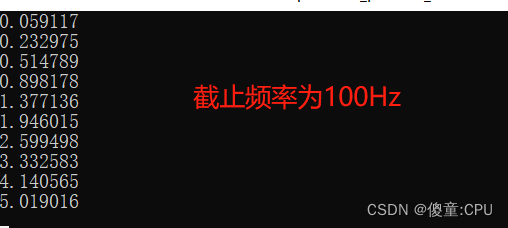
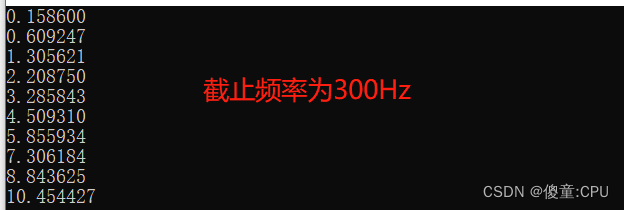
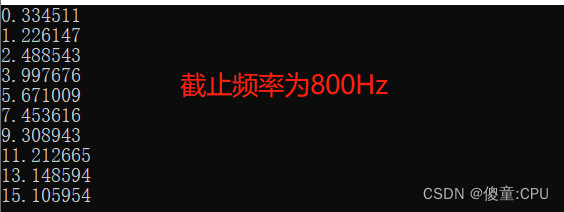
for (i = 0; i < 10; i++) {
printf("%f\n", output_signal[i]);
}
return 0;
}

例子二
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
#define PI (3.141592f)
typedef struct
{
float ts; //采样周期(s)
float fc; //截至频率(hz)
float lastYn; //上一次滤波值
float alpha; //滤波系数
} low_pass_filter_t;
low_pass_filter_t low_pass_filter={0}; //定义滤波器
//初始化滤波系数
void Init_lowPass_alpha(low_pass_filter_t* const filter,const float ts, const float fc)
{
float b=2*M_PI*fc*ts;
filter->ts=ts;
filter->fc=fc;
filter->lastYn=0;
filter->alpha=b/(b+1);
}
//低通滤波 给你data 你处理了返回一个数据
float Low_pass_filter(low_pass_filter_t* const filter, const float data)
{
float tem=filter->lastYn+(filter->alpha*(data-filter->lastYn));
filter->lastYn=tem;
return tem;
}
int main()
{
Init_lowPass_alpha(&low_pass_filter,10000,10);
float input[10] = {1,2,3,4,5,6,8,9,10};
float output[10] = {0};
for(int i = 0;i<10;i++)
{
output[i] = Low_pass_filter(&low_pass_filter,input[i]);
printf("%f\n",output[i]);
}
}
文章来源:https://blog.csdn.net/qq_45159887/article/details/135562843
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- idea SpringBoot项目 Run Dashboard 多个启动类分组展示 失效
- Vue懒加载深度解析:提升性能、优化用户体验的完整指南
- mysql 空间函数
- 在阿里云ECS云服务器上部署和使用开源的应用程序容器引擎Docker
- CentOS防火墙操作开放端口
- 调用一个第三方api,但是它返回是异步回调的,如何把这个异步回调做成同步
- 2022-2023年度广东省职业院校学生专业技能大赛“软件测试”赛项接口测试训练题目
- vue el-select自定义搜索选择案例
- Linux环境安装MySQL5.7教程
- 「云渲染科普」效果图渲染出来很灰怎么处理?