[足式机器人]Part2 Dr. CAN学习笔记-自动控制原理Ch1-7Lead Compensator超前补偿器(调节根轨迹)
本文仅供学习使用
本文参考:
B站:DR_CAN
Dr. CAN学习笔记-自动控制原理Ch1-7Lead Compensator超前补偿器(调节根轨迹)

1. Plot Rootlocus 绘制根轨迹
G
(
s
)
=
1
s
(
s
+
2
)
G\left( s \right) =\frac{1}{s\left( s+2 \right)}
G(s)=s(s+2)1?

2. System Performance 系统表现
输入Input —— δ ( t ) \delta \left( t \right) δ(t) 单位冲激
-
K
K
K 较小时,
p
1
,
p
2
p_1,p_2
p1?,p2? :
x
(
t
)
=
c
1
e
p
1
t
+
c
2
e
p
2
t
,
p
1
<
0
,
p
2
<
0
x\left( t \right) =c_1e^{p_1t}+c_2e^{p_2t},p_1<0,p_2<0
x(t)=c1?ep1?t+c2?ep2?t,p1?<0,p2?<0

-
K
K
K 较大时,根在复平面:
p
1
,
p
2
p_1,p_2
p1?,p2? :
x
(
t
)
=
c
e
?
t
sin
?
ω
n
t
x\left( t \right) =ce^{-t}\sin \omega _{\mathrm{n}}t
x(t)=ce?tsinωn?t - 无论如何改变
K
K
K值,都无法改变收敛速度
-
3. 改善/加快收敛速度
——改变根轨迹,希望根在
?
2
+
2
3
-2+2\sqrt{3}
?2+23?
G
(
s
)
=
1
s
(
s
+
2
)
G\left( s \right) =\frac{1}{s\left( s+2 \right)}
G(s)=s(s+2)1?
在根轨迹上的点满足:
∠
K
G
(
s
)
=
?
π
\angle KG\left( s \right) =-\pi
∠KG(s)=?π (零点到根的夹角和 - 极点到根的夹角和)
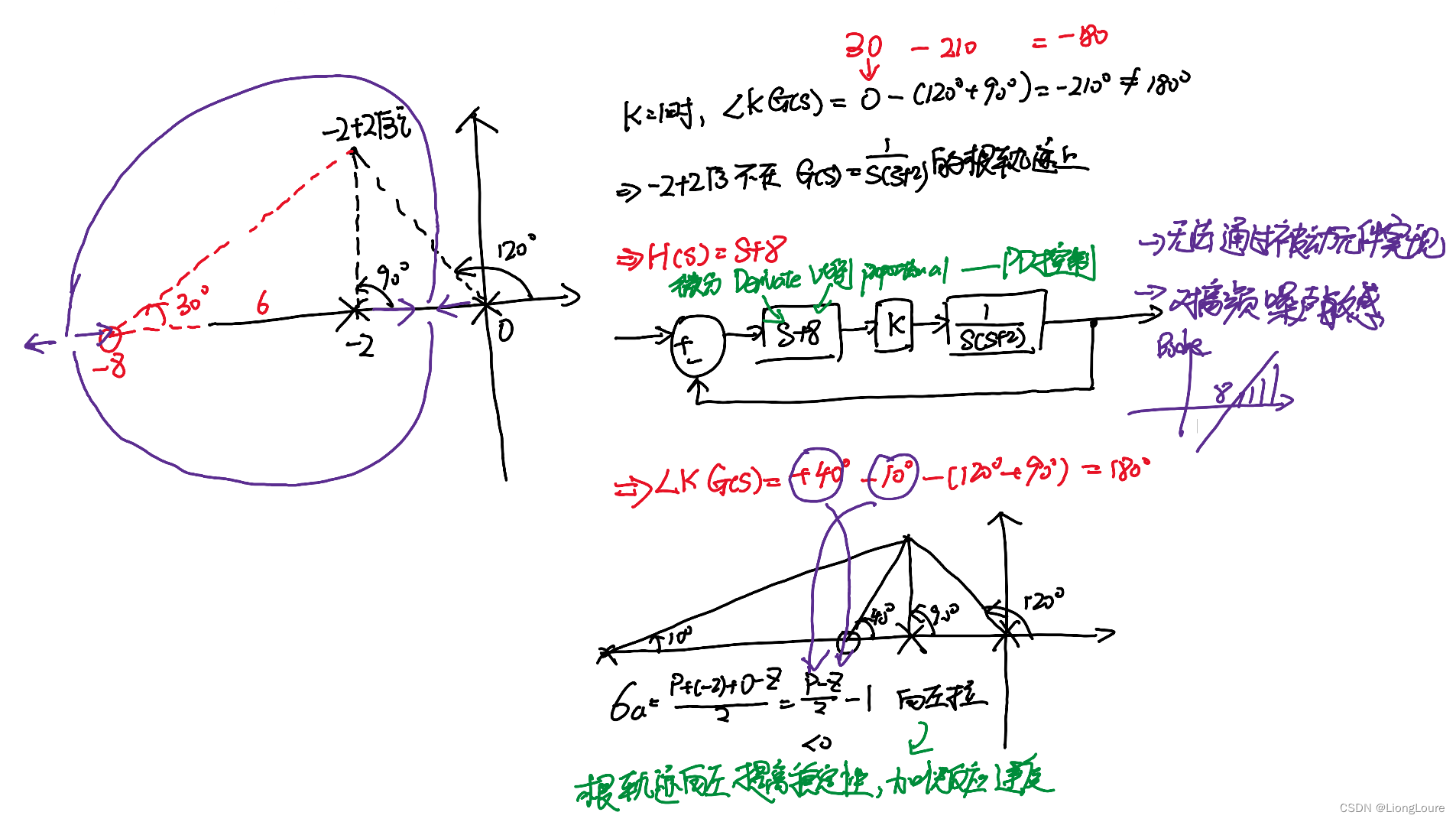
4. 超前补偿器 Lead Comperastor
H
(
s
)
=
s
?
z
s
?
p
,
∥
z
∥
<
∥
p
∥
H\left( s \right) =\frac{s-z}{s-p},\left\| z \right\| <\left\| p \right\|
H(s)=s?ps?z?,∥z∥<∥p∥

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- mysql-3-可视化工具使用
- 解决 Navicat 在笔记本外接显示器分辨率自适应展示问题
- 【算法】力扣【动态规划,LCS】1312. 让字符串成为回文串的最少插入次数
- C#中LinkedList<T>的快速上手
- 终极Linux命令宝典:从入门到精通,一网打尽!
- LabVIEW开发LED驱动电源测试系统
- 51-6 Vision Transformer ,ViT 论文精读
- 【LeetCode每日一题】1599. 经营摩天轮的最大利润(模拟)—2024新年快乐!
- 【PHP】where和whereOr一起复杂查询示例
- 基于ssm的校友录的设计与实现+jsp论文