记录 搭载小车 运行激光slam lio-sam fast-lio2
用了将近一个月搭载了一台履带车
其中
主控:NUC i7-8559U
激光雷达为:velodyne16线和hesai64线
IMU为:轮趣N100 mini
对imu使用上位机进行调平矫正
设置输出400HZ
对外参标定
首先使用velodyne16线
安装驱动直接运行,没遇到啥问题
不需要考虑硬件时间同步,会自动同步,运行lio sam会崩(下面会提)
**首先使用hesai64
**
激光雷达需要ptp时间同步,参考以下两篇文章可以解决。
https://blog.csdn.net/zn_2580/article/details/125449455
https://blog.csdn.net/wxc_1998/article/details/131021657
然后运行fast lio2感觉有点飘,稍微旋转大一点就会飘
(开始认为激光雷达和imu时间没有对齐)经过多次调试,发现将imu的频率下降到100hz就好多了(可能因为imu精度有问题,但是看起来又没问题)。
最后运行lio-sam,所有设备静止下,一运行直接飘,如下图所示
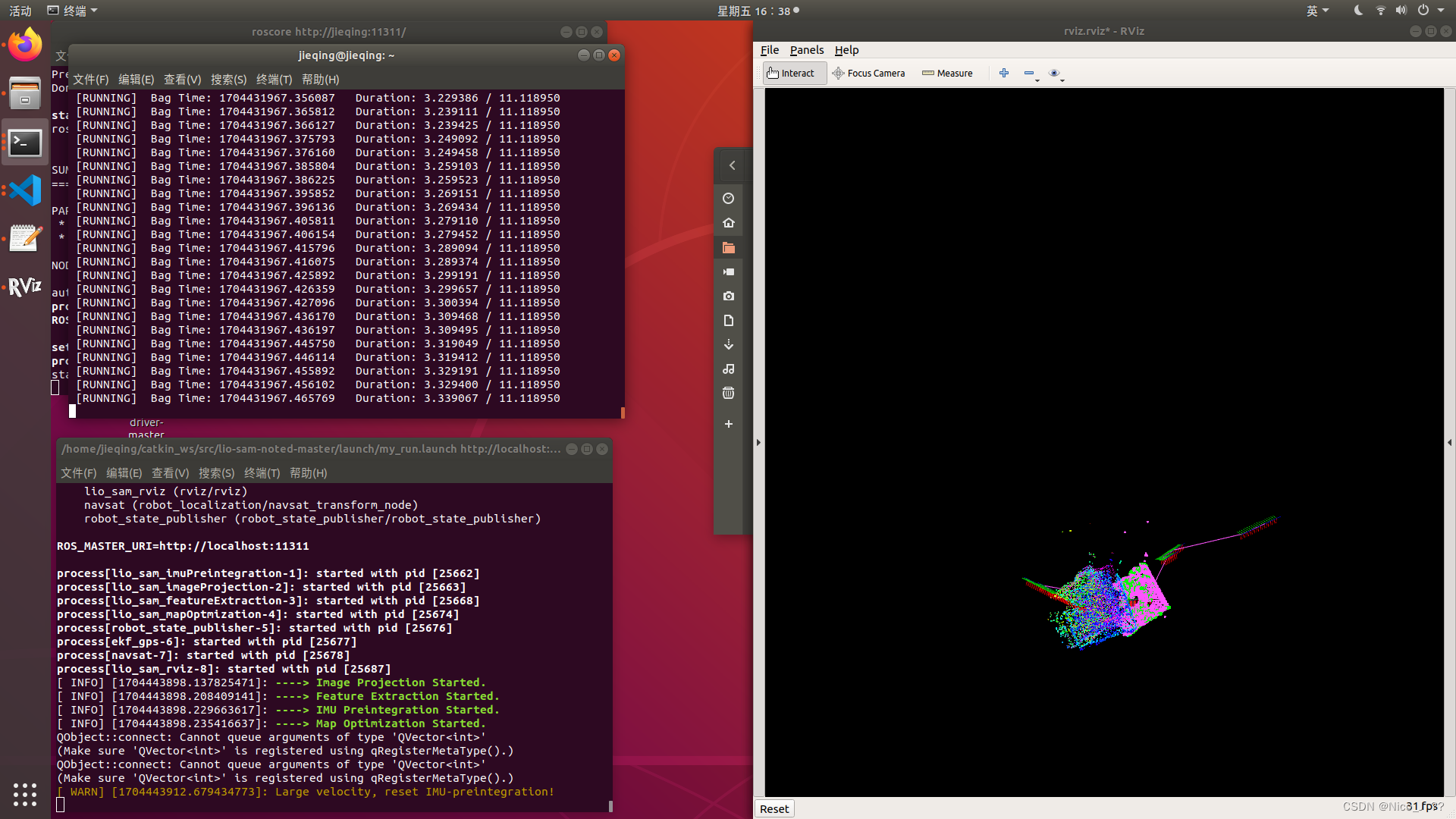 经过检查代码,在imuPreintegration.cpp文件内 void odometryHandler(const nav_msgs::Odometry::ConstPtr& odomMsg)函数内的gtsam优化的结果出了问题。
经过检查代码,在imuPreintegration.cpp文件内 void odometryHandler(const nav_msgs::Odometry::ConstPtr& odomMsg)函数内的gtsam优化的结果出了问题。
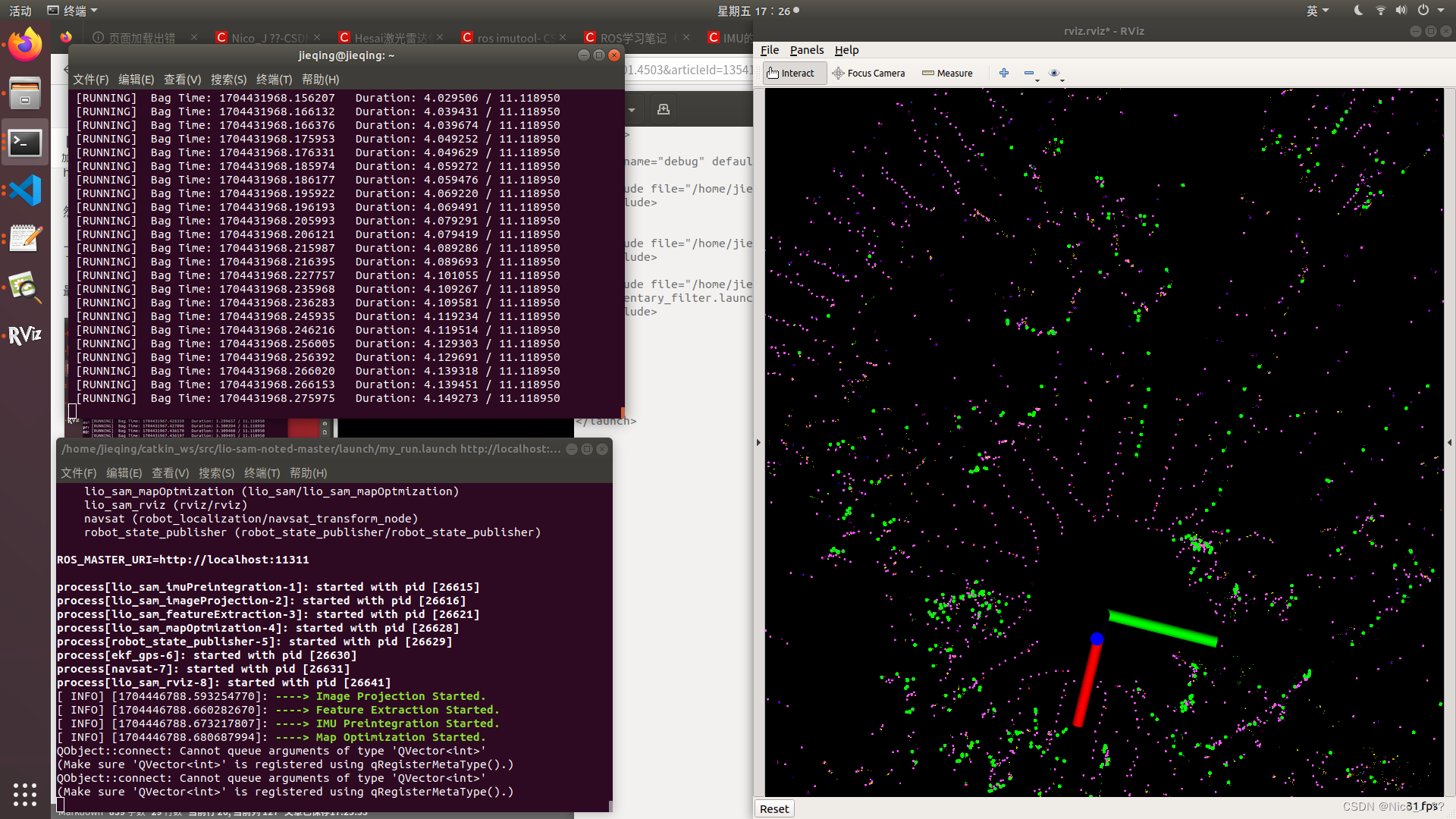
解决方法:对imu原始数据进行卡尔曼滤波
使用imu_tools进行滤波,对/catkin_ws/src/imu_tools/imu_complementary_filter/launch/complementary_filter.launch文件进行修改,改好输入输出,再进行运行lio sam。
下载地质:https://github.com/ccny-ros-pkg/imu_tools
最后运行lio-sam,所有设备静止下,没飘,如下图所示
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 毅速:金属3D打印的收费标准与影响因素
- 【虹科干货】Linux越来越容易受到攻击,怎么防御?
- 代码随想录训练营第四十九天| ● 121. 买卖股票的最佳时机 ● 122.买卖股票的最佳时机II
- 消息中间件
- 【陈老板赠书活动 - 20期】- Python树莓派编程从零开始(第3版)
- Shell基本操作(1)
- 2024.1.17 用户画像day02 - Elastic Search
- AJAX入门
- VUE中的8种常规通信方式
- Rocketmq rust版本-开篇