stm32实战之su-03t语音模块固件的制作与烧录
发布时间:2024年01月04日
目录
su-03t简介
SU-03T 是一款低成本、低功耗、小体积的离线语音识别模组,能快速应用于智能家居,各类智能小家电,86 盒,玩具,灯具等需要语音操控的产品,SU-03T也具备强大的软件开发能力,我们可以在“??智能公元??”平台上实现语音固件的零代码开发,提高工作效率。
管脚定义
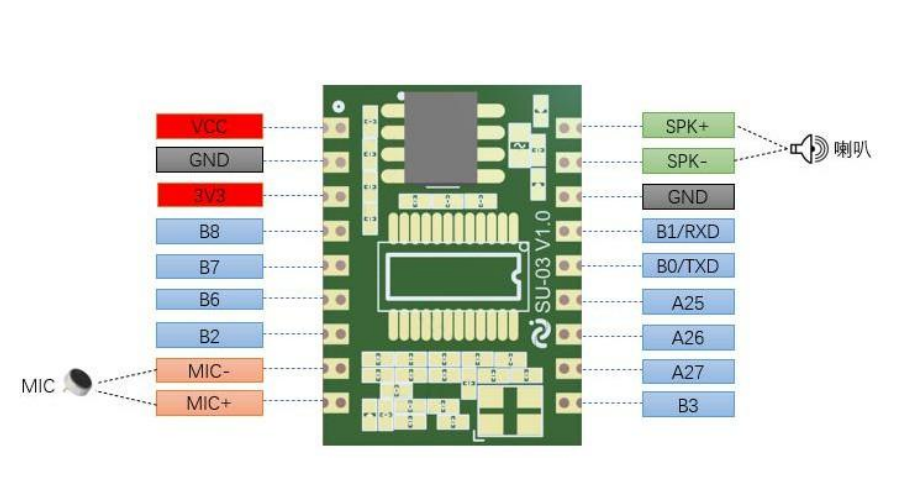


其中需要注意的是UART0的B0、B1是调试器的语音固件烧录口,串口烧录则选择UART1的B6、B7引脚,当固件烧录完成之后则可以使用UART1的B2、B3 引脚和MCU进行通信。
??智能公元语音固件制作??
账号注册
打开??智能公元??网页进行账号注册

创建产品



产品配置
创建产品成功后会进入产品配置,在大部分情况下都可以使用默认配置,我们只需要关注以下几个配置即可:
唤醒词自定义
唤醒词自定义可以定义语音模块的唤醒词以及唤醒之后的回复,用于唤醒语音模块,开始使用自定义命令词与模块进行语音交互

命令词自定义
命令词自定义可以自己定义的关键词来控制语音模块,例如“开灯”、“关灯”等,免唤醒的命令词可以不需要使用唤醒词直接和模块进行交互。


发音人配置
发音人配置可以用来配置语音模块的音色、音调和语速。

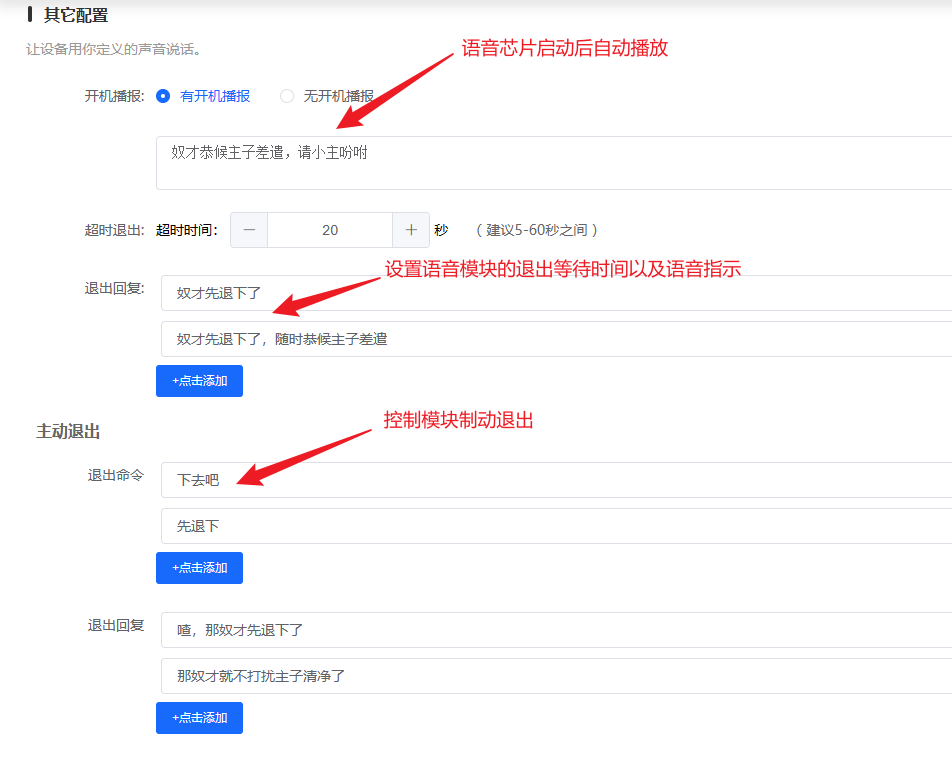
其他配置
生成和下载语音固件


固件烧录
下载SDK固件烧录工具

在SDK固件包的 uni_hb_m_solution-121028-20230920\uni_hb_m_solution\image_demo\Hummingbird-M-Update-Tool 下可以看到以下文件
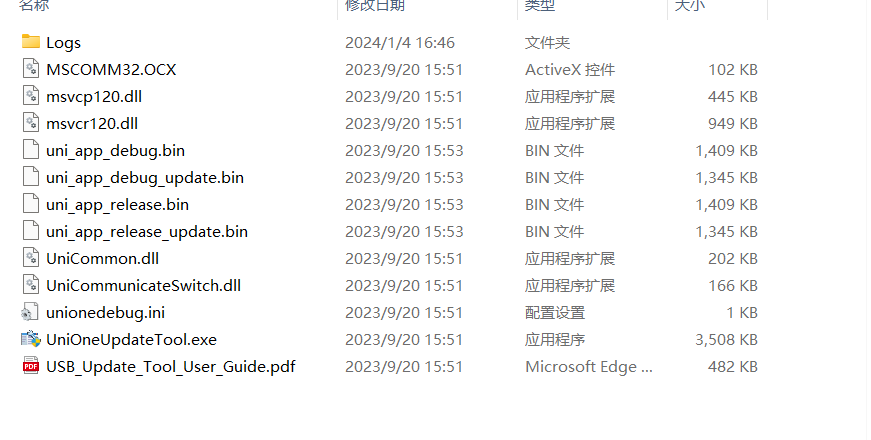
UniOneUpdateTool.exe为串口烧录工具
USB_Update_Tool_User_Guide.pdf为烧录指导书,写的很详细,跟着烧录即可
SU-03T驱动分享
#include "su_03t.h"
uint8_t usart_su_RXdata; //存放接收数据寄存器的值
uint8_t usart_su_RXflag; //接收数据标志位
uint8_t usart_su_RXpacket[6] = {0}; //hex数据包接收数组
uint8_t usart_su_TXpacket[14] = {0}; //hex数据包接收数组
/**
* @brief 配置串口 PC10 发送复用推挽 PC11 接收浮空模式
* @param None
* @retval None
*/
void su_o3t_init(void){
//初始化GPIO口
//PA9复用推挽
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
//PA10浮空
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_Init(GPIOC, &GPIO_InitStructure);
//串口初始化
//开启串口时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_UART4, ENABLE);
//初始化串口
USART_InitTypeDef USART_InitStruct = {0};
USART_InitStruct.USART_BaudRate = 115200; //设置波特率
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制失能
USART_InitStruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //选择串口发送模式和接收模式
USART_InitStruct.USART_Parity = USART_Parity_No; //不需要校验
USART_InitStruct.USART_StopBits = USART_StopBits_1; //一位停止位
USART_InitStruct.USART_WordLength = USART_WordLength_8b; //字长选择8位
USART_Init(UART4, &USART_InitStruct);
//开启串口中断
USART_ITConfig(UART4, USART_IT_RXNE, ENABLE);
//初始化NVIC
//NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_InitStruct.NVIC_IRQChannel = UART4_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 4;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0;
NVIC_Init(&NVIC_InitStruct);
//使能串口
USART_Cmd(UART4, ENABLE);
}
/**
* @brief 串口一中断服务函数,接收一个字节的数据,并将标志位置1
* hex数据包 长度 6 开始标志位 0xAA
* @param None
* @retval None
*/
void UART4_IRQHandler(void){
static uint8_t RX_su_State = 0;
static uint8_t su_pRXpacket = 0;
//usart_init();
if(USART_GetITStatus(UART4, USART_IT_RXNE) == SET){
USART_ClearITPendingBit(UART4, USART_IT_RXNE);
//usart_send_string("y");
usart_su_RXdata = USART_ReceiveData(UART4);
//判断接收的数据包头
if(RX_su_State == 0){
if(usart_su_RXdata == 0XAA){ //接收到的使hex文件
usart_su_RXpacket[0] = usart_su_RXdata;
RX_su_State = 1;
su_pRXpacket = 1;
}
}
else if(RX_su_State == 1){ //接收hex文件的内容
usart_su_RXpacket[su_pRXpacket] = usart_su_RXdata;
su_pRXpacket++;
if(su_pRXpacket >= 5){ //接收数据包长度位4的数据
RX_su_State = 2;
}
}
else if(RX_su_State == 2){ //判断hex数据包结束标志位
if(usart_su_RXdata == 0XAA){
usart_send_array(USART1, usart_su_RXpacket,6);
usart_su_RXpacket[su_pRXpacket] = usart_su_RXdata;
RX_su_State = 0;
usart_su_RXflag = 1;
}
else{
RX_su_State = 0;
usart_su_RXflag = 0;
usart_send_array(USART1, usart_su_RXpacket,6);
usart_su_RXpacket[su_pRXpacket] = usart_su_RXdata;
//usart_send_string("$");
}
}
}
}
/**
* @brief 获取usart_su_flag的值
* @param None
* @retval usart_su_RXflag 串口2接收标志位
*/
uint8_t usart_get_su_RXflag(void){
if(usart_su_RXflag == 1){
usart_su_RXflag = 0;
return 1;
}
return 0;
}
/**
* @brief 处理su_03t的数据
* @param None
* @retval None
*/
void vioce_analysis(void){
//usart_send_array(usart_su_RXpacket, 5);
time_t rawtime;
struct tm *info = NULL;
//info = localtime(&rawtime);
if(usart_get_su_RXflag() == 1){
//char str[5] = {0};
switch(usart_su_RXpacket[3]){
case 0x01: //温度
usart_su_TXpacket[0] = 0XAA;
usart_su_TXpacket[1] = 0X55;
usart_su_TXpacket[3] = dht_data.tmp;
usart_su_TXpacket[4] = dht_data.tmp_flo;
usart_su_TXpacket[5] = 0X55;
usart_su_TXpacket[6] = 0XAA;
if(dht_data.tmp_flag == 0){ //温度为正
usart_su_TXpacket[2] = 0x02;
}
else{
usart_su_TXpacket[2] = 0x09;
}
usart_send2su_array(usart_su_TXpacket, 6);
break;
case 0x02://湿度
usart_su_TXpacket[0] = 0XAA;
usart_su_TXpacket[1] = 0X55;
usart_su_TXpacket[2] = 0X03;
usart_su_TXpacket[3] = dht_data.hum;
usart_su_TXpacket[4] = 0X55;
usart_su_TXpacket[5] = 0XAA;
usart_send2su_array(usart_su_TXpacket, 6);
break;
case 0x03://空气成分
usart_su_TXpacket[0] = 0XAA;
usart_su_TXpacket[1] = 0X55;
usart_su_TXpacket[2] = 0X01;
usart_su_TXpacket[6] = 0X55;
usart_su_TXpacket[7] = 0XAA;
//sprintf(str,"0x%x",(int)(kqm_data.VOC * 100));
//usart_su_TXpacket[4] = atoi(str);
usart_su_TXpacket[3] = (uint8_t)(kqm_data.VOC * 100);
// printf("%d", usart_su_TXpacket[3]);
usart_su_TXpacket[4] = (uint8_t)(kqm_data.CHO * 100);
//printf("%d", usart_su_TXpacket[4]);
usart_su_TXpacket[5] = kqm_data.CO2;
// printf("%d", usart_su_TXpacket[5]);
usart_send2su_array(usart_su_TXpacket, 8);
// usart_send_array(usart_su_TXpacket,8);
break;
case 0x04://开灯
led_enable(LED1);
break;
case 0x05://关灯
led_disable(LED1);
break;
case 0x06://甲烷
usart_su_TXpacket[0] = 0XAA;
usart_su_TXpacket[1] = 0X55;
usart_su_TXpacket[3] = (uint8_t)(kqm_data.CHO * 100);
usart_su_TXpacket[4] = 0X55;
usart_su_TXpacket[5] = 0XAA;
if(kqm_data.CHO <0.03){
usart_su_TXpacket[2] = 0x04;
}
else if(kqm_data.CHO >=0.03 && kqm_data.CHO <0.1){
usart_su_TXpacket[2] = 0x05;
}
else{
usart_su_TXpacket[2] = 0x06;
}
usart_send2su_array(usart_su_TXpacket, 6);
break;
case 0x07://开启蜂鸣器
buzzer_enable();
break;
case 0x08://关闭蜂鸣器
buzzer_disable();
break;
case 0x9://二氧化碳
usart_su_TXpacket[0] = 0XAA;
usart_su_TXpacket[1] = 0X55;
usart_su_TXpacket[2] = 0x07;
usart_su_TXpacket[3] = kqm_data.CO2;
usart_su_TXpacket[4] = 0X55;
usart_su_TXpacket[5] = 0XAA;
usart_send2su_array(usart_su_TXpacket, 6);
break;
case 0x10://时间
rawtime = RTC_GetCounter();
info = localtime(&rawtime);
//info=gmtime(&rawtime);
usart_su_TXpacket[0] = 0XAA;
usart_su_TXpacket[1] = 0X55;
usart_su_TXpacket[2] = 0x08;
usart_su_TXpacket[3] = (info->tm_year + 1900) / 1000;
usart_su_TXpacket[4] = ((info->tm_year + 1900) / 100) % 10;
usart_su_TXpacket[5] = ((info->tm_year + 1900) / 10) % 100;
usart_su_TXpacket[6] = (info->tm_year + 1900) % 10;
usart_su_TXpacket[7] = info->tm_mon + 1;
usart_su_TXpacket[8] = info->tm_mday;
usart_su_TXpacket[9] = info->tm_hour;
usart_su_TXpacket[10] = info->tm_min;
usart_su_TXpacket[11] = info->tm_sec;
usart_su_TXpacket[12] = 0X55;
usart_su_TXpacket[13] = 0XAA;
usart_send_array(USART1, usart_su_TXpacket, 14);
printf("%d\t%d\t%d\t%d\t", info->tm_year, info->tm_mon, info->tm_mday, info->tm_hour);
usart_send2su_array(usart_su_TXpacket, 14);
break;
}
}
}
/**
* @brief 发送一个数组
* @param uint8_t *array 需要发送的数组
* @param uint16_t len 发送的数组长度
* @retval None
*/
void usart_send2su_array(uint8_t *array, uint16_t len){
uint16_t i = 0;
for(i = 0; i < len; i++){
usart_send2su_bit(array[i]);
}
}
/**
* @brief 发送单个字节
* @param uint8_t data 需要发送的字节
* @retval None
*/
void usart_send2su_bit(uint8_t data){
while(USART_GetFlagStatus(UART4, USART_FLAG_TC) != 1); //等待上一次数据发送完成
USART_SendData(UART4, data); //发送数据
}
文章来源:https://blog.csdn.net/qq_58288010/article/details/135392612
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 前端项目部署发版流程
- 提高Blender软件3D渲染性能的10种方法,渲染效率飙升!
- MYSQL InnoDB引擎
- 1、学习环境准备
- Java设计模式之状态模式详解
- 计算机毕业论文内容参考|基于智能搜索引擎的图书管理系统的设计与实现
- 免费IDEA插件推荐-Apipost-Helper
- JetPack组件学习ViewModel
- Java输入输出(I/O)流
- Java的struts2+MySQL+jsp实现登录、注册以及文件上传