高阶智驾,开打「硬核」战
一直以来,高阶智驾的「规模化普及」何时到来,硬件的「军备竞赛」和系统「降本增效」长期处于博弈状态。
其中,作为关键环节之一,传感器配置以及相应的感知算法技术迭代升级是最具看点的部分。以特斯拉、百度Apollo为代表的纯视觉技术路线阵营玩家,在此轮博弈中,优势凸显。
01 第一性原理看技术演进
众所周知,高阶智驾的最大争议,就是激光雷达。
比如,特斯拉CEO埃隆·马斯克一直坚定地反对激光雷达,甚至多次在公开场合贬低激光雷达,比如:“激光雷达毫无意义,对于自动驾驶汽车来说没有必要”。
而特斯拉对“第一性原理”坚持(人类驾驶员在执行驾驶任务的时候,主要依靠视觉,另外加上两个耳朵),也成为行业内真正意义上第一个在量产车上实现“纯视觉”高阶智能驾驶方案的车企。
尤其是近年来BEV+Transformer这种全新感知范式的上车(已经得到行业的普遍认同),再加上时序信息以及Occupancy Network(占用网络)的推出,进一步增强视觉的3D感知性能提升。

而更为关键的是,高阶智驾的普及,需要足够的性价比优势。相比而言,激光雷达即便目前已经实现500美元的量产交付,但对于车企来说,还不够。
事实上,激光雷达厂商并不想快速降价。
按照速腾聚创最新发布的港股材料,今年上半年,ADAS激光雷达的交付价格仍高达3700元。而车企普遍的规模化上车预期是300甚至100美元。
不过,按照该公司的说法,激光雷达的定价也受到了市场竞争和车企议价能力(每年下调1-5%)的影响,但预计未来不会出现显著下降。
显然,这意味着,车企和Tier1需要做好应对方案。毕竟,在白热化竞争的终端市场,任何一家车企都要优先考量成本。
实际上,众所周知,目前国内市场已经交付的、具备城市场景NOA的车型,基本上都是采用激光雷达的配置方案,再加上高精度地图、高精度定位等其余配置,整套系统成本大幅增加。
如果按照此前国内某Tier1推出的8000元级「高性价比」城市全场景无图NOH产品方案,额外增加一颗前向激光雷达,整体成本至少增加近40%。
而在市场端,行业仍在等待新的方案。
高工智能汽车研究院最新发布数据显示,2023年1-9月,中国市场(不含进出口)乘用车前装标配(软硬件)NOA交付新车37.73万辆,同比上年同期增长151.20%。
不过,在前装搭载率方面,也仅仅不到3%(2.55%)。这意味着,在触及10%拐点之前,市场依然存在各种不确定性,比如方案配置。
激光雷达的支持者认为,“激光雷达会越来越便宜,接下来的传感器融合会有激光雷达,真正的L3、L4需要激光雷达。”
但质疑者强调,“推动城市NOA落地的情况下,各家配置激光雷达的车型是否能用好激光雷达,需要实际验证。”
“激光雷达可在短期内迅速提升系统表现,但存在上限;而长期来看,纯视觉在系统成本、迭代速度、数据闭环,甚至向端到端发展都具备优势。”极越公司相关负责人表示。
今年10月份,极越01正式开启交付,这款现象级智能电动车型搭载的正是百度Apollo City Driving Max的纯视觉高阶智能驾驶系统。

这是全球唯二、国内首款可量产,并实现交付的纯视觉城市高阶智驾解决方案,并抢先特斯拉FSD在国内城市场景量产落地。
在高工智能汽车研究院看来,增加一种传感器的问题,不仅仅是硬件成本的增加,还有大量的软件算法开发和适配,尤其是主被动传感器的融合,一直是不稳定的状态。
实际的行业状态是?「此前很长一段时间,因为纯视觉方案具有局限性,所以很多玩家不得已加入激光雷达。」
此外,一直以来,视觉感知的底层技术研发,真正参与的企业并不多。早期的博世、Mobileye由于交付的都是软硬方案,不管是Tier1还是车企,并没有在感知技术上有过多的投入。
「相比于规控,前端感知一直是技术洼地。」在高工智能汽车研究院看来,类似特斯拉、百度Apollo这样的企业,在行业内并不多见。
02 源头数据,规模化竞争关键
而视觉感知技术的沉淀,还需要大量的真实数据支持。
比如,前特斯拉AI总监Andrej Karpathy表示,模型(不管是小模型,还是大模型)需要数据来驱动,模型决定上限,而数据帮助模型到达这个上限。
尤其是BEV+Transformer的导入,在百度看来,BEV将视觉测距精度从“普通卷尺”升级到了“游标卡尺”的新高度,占用网络技术的引进又为感知系统进化出了昆虫复眼,将全天候周边环境尽收眼底。
事实上,相比于特斯拉的影子模式,国内大部分车企的有效数据采集规模以及数据质量,还有不小的差距。相比而言,Robotaxi是更好的补充。
这种策略,也在被更多的车企所效仿。
比如,今年小鹏汽车巨资收购了滴滴智能汽车开发业务资产,同时,借助滴滴的网约车平台,能够产生的数据比现有私家车更大更丰富,能够对自动驾驶模型带来更质变的影响。
在此之前,小鹏也推出了Robotaxi的首款硬件零改装量产车。按照小鹏的官方表态,小鹏G9 Robotaxi可以和量产车辆双线并行共同加入训练体系,极大提升训练数据的来源、体量及场景丰富度。
而更早实现这套闭环逻辑的,就是百度Apollo,即便是在全球范围内,这也是到目前为止,独一无二的存在。
根据百度今年Q3财报显示,萝卜快跑已在包括北京、武汉、重庆、深圳等十余个试点城市提供超过410万自动驾驶出行服务订单,自动驾驶安全运营测试里程累计已超7800万公里。
而Robotaxi的高精传感器从数据源头上形成了差异化竞争力,按照百度的说法,真值数据质量与行业平均水平拉开了「8K超清与标清」的代际差距,数据精度持续刷新行业天花板。
最关键的是,纯视觉方案的实现离不开高品质训练数据。而随着中国市场开始启动L3/L4级自动驾驶量产车的上路准入,这种趋势愈加明显。
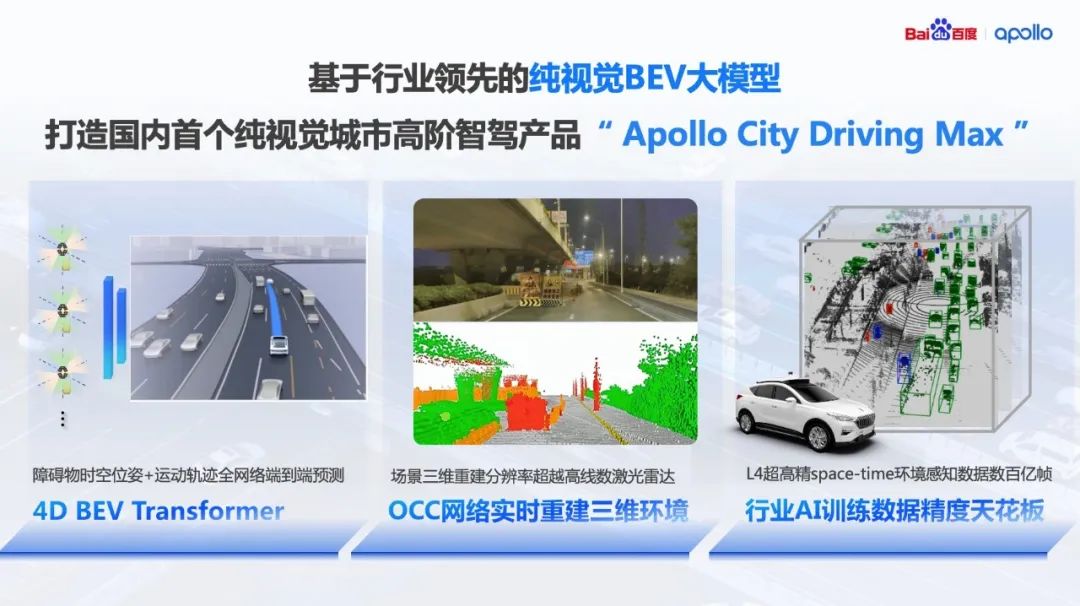
在具体的技术持续升级方面,百度Apollo在Apollo Lite框架基础上,用4D BEV Transformer全新升级第二代纯视觉感知系统,“快、准、稳“地预测道路参与者的时空位姿轨迹。
同时,配合业内最前沿的占用网络OCC技术,百度Apollo能够对静态环境做端到端实时重建,可以获取比激光雷达点云分辨率更高的三维结构信息。
从实际交付表现来看,也是印证了百度Apollo纯视觉技术的领先性。
在高速场景,百度Apollo推出行泊一体产品Apollo Highway Driving Pro,并在新岚图FREE实现量产。数据显示,新岚图FREE的行泊车智驾功能激活率高达83.74%;高速NOA总里程达33万公里,其中NOA每千公里接管次数为2.02次/千公里;高速NOA单次最长行驶里程为364公里。
针对城市复杂道路场景,百度Apollo也推出了Apollo City Driving Max。作为国内唯一实现交付的纯视觉高阶智驾解决方案,Apollo City Driving Max已经跑通了泊车、高速、城市全域场景,实现与「有激光雷达」同样好的产品体验,BOM成本更低,让整车更有价格争力。
目前,百度Apollo City Driving Max已经在极越01实现量产。极越官方社交账号发布的一段城市领航辅助驾驶路试视频显示,一台搭载百度Apollo纯视觉高阶智驾解决方案的极越01“一镜到底”跑完了上海陆家嘴-外滩-南浦大桥等路段,全程零接管,从容应对各种复杂路况。
而在极越官方发布的OCC占用网络技术演示视频中,基于百度Apollo的量产技术方案,汽车机器人的视觉世界里,可以实时重建还原3D场景——比如,系统用体素清晰展示了栏杆、绿植、路障等标准障碍物,同时还精准识别出了施工中的工程车、树木中的路灯等异形障碍物。
这意味着,通过百度Apollo的BEV+Transformer+OCC的方案,车辆可以减少漏检、误检并弥补视觉所不具备的空间高度信息,替代了激光雷达,并大幅提升了泛化能力。
在高工智能汽车研究院看来,高阶智驾的终局比拼,已经进入最为关键的周期。无论是城区NOA,还是L3/L4级自动驾驶,谁能在系统成本最优的前提下,实现规模化落地,将决定谁能留到最后。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- kmeans两个终止条件是否等价为什么
- vue中的侦听器和组件之间的通信
- 热门好用的第三方api接口汇总
- 深圳锐科达SIP矿用电话模块SV-2801VP
- 基于springboot的宠物健康咨询系统【数据库设计、论文、毕设源码、开题报告】
- SpringBoot实用开发(九)-- RedisTemplate处理ZSet类型的数据
- 抖店如何绑定官方账号?实操详解!
- 手把手教你学会接口自动化二十一-接入断言
- 如何优雅解决若依二级菜单名字过长问题:菜单长度展示优化攻略
- vue-springboot二手图书商城交易系统ij5dr