梅开二度 | YOLOv8算法超详细解析(包括诞生背景+论文解析+技术原理等)

前言:Hello大家好,我是小哥谈。YOLOv8与YOLOv5出自同一个团队,是一款前沿、最先进(SOTA)的模型,基于先前YOLOv5版本的成功,引入了新功能和改进,进一步提升性能和灵活性。YOLOv8设计快速、准确且易于使用,使其成为各种物体检测与跟踪、实例分割、图像分类和姿态估计任务的绝佳选择。🌈?????
? ? ?目录

🚀1.诞生背景
YOLOv8是由YOLOv5的发布者Ultralytics发布的最新版本的YOLO,它可用于对象检测、分割、分类任务以及大型数据集的学习,并且可以在包括CPU和GPU在内的各种硬件上执行。
YOLOv8是一种尖端的、最先进的 (SOTA) 模型,它建立在以前成功的YOLO版本的基础上,并引入了新的功能和改进,以进一步提高性能和灵活性。YOLOv8旨在快速、准确且易于使用,这也使其成为对象检测、图像分割和图像分类任务的绝佳选择。具体创新包括一个新的骨干网络、一个新的 Ancher-Free 检测头和一个新的损失函数,还支持YOLO以往版本,方便不同版本切换和性能对比。
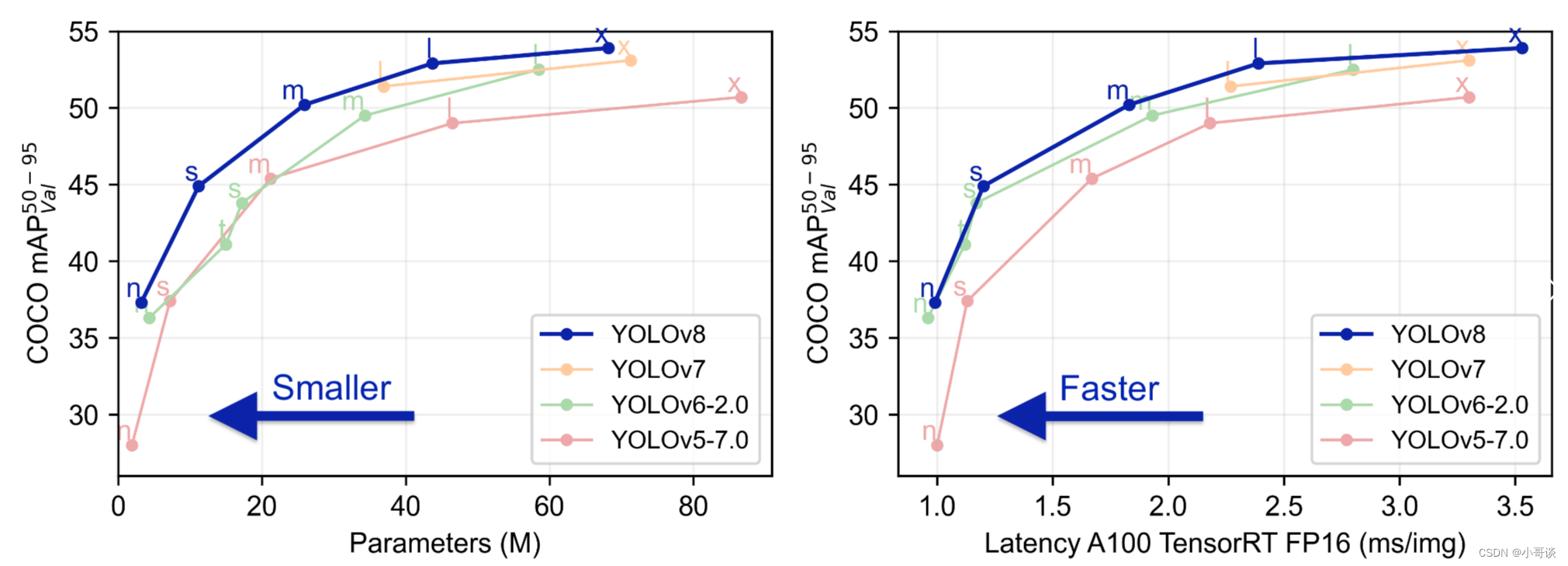
YOLOv8有5个不同模型大小的预训练模型:n、s、m、l 和 x。关于这5种模型的相关参数如下所示,可以看到比YOLOv5有了很大的提升,特别是 l 和 x,它们是大模型尺寸,在减少参数数量的同时提高了精度。

YOLOv8是一款前沿、最先进的目标检测模型,具有以下主要特点:
-
FPN+PAN结构:YOLOv8采用了FPN+PAN结构进行特征融合,这一部分与YOLOv4的结构相同。通过丰富的特征融合,可以提高目标检测的准确性和性能。
-
快速、准确、易于使用:YOLOv8的设计目标是快速、准确且易于使用。它在目标检测、跟踪、实例分割、图像分类和姿态估计等任务中表现出色,成为各种应用场景的绝佳选择。
-
新功能和改进:YOLOv8在YOLOv5的基础上引入了新功能和改进,进一步提升了性能和灵活性。这些新功能和改进使得YOLOv8能够更好地适应不同的目标检测任务和场景。
-
SOTA模型:YOLOv8是一款前沿的、最先进的模型,它在目标检测领域取得了State-of-the-Art(SOTA)的性能。这意味着它在准确性和效率方面都具有领先的优势。
综上所述,YOLOv8是一款具有FPN+PAN结构、快速、准确且易于使用的目标检测模型,具有新功能和改进,并且在性能方面达到了最先进水平。?
🚀2.论文发表
YOLOv8论文即将发表!要知道YOLOv5自从2020年发布以来,一直是没有论文的,而 YOLOv8(YOLOv5团队)这次首次承认将先发布 arXiv 版本的论文(目前还在火速撰写中)。
YOLOv8官方放出了 YOLOv8与YOLOv7、YOLOv6和YOLOv5的性能比较折线图,如下所示:?
代码地址:??GitCode - 开发者的代码家园
🚀3.技术原理
💥💥3.1?网络结构
YOLOv5和YOLOv8是两个不同的目标检测模型,它们在架构和推理过程上有一些差异。
YOLOv5架构特点:
- Backbone:YOLOv5使用CSPDarknet作为主干网络,它是一种轻量级的Darknet架构,具有更高的速度和更好的性能。
- PAN/FPN:YOLOv5使用PAN(Path Aggregation Network)来融合不同尺度的特征图,以提高检测性能。
- Head:YOLOv5的检测头部由多个卷积层组成,用于预测目标的边界框和类别。
- 正负样本分配策略:YOLOv5使用IoU(Intersection over Union)阈值来分配正负样本,以平衡正负样本的数量。
- Loss:YOLOv5使用GIoU(Generalized Intersection over Union)损失函数来优化目标检测的准确性。
YOLOv8架构特点:
- Backbone:YOLOv8使用Darknet-53作为主干网络,它是一种更深的Darknet架构,具有更强的特征提取能力。
- PAN-FPN:YOLOv8使用PAN-FPN(Path Aggregation Network with Feature Pyramid Network)来融合不同尺度的特征图,以提高检测性能。
- Head:YOLOv8的检测头部由多个卷积层和全连接层组成,用于预测目标的边界框和类别。
- 正负样本分配策略:YOLOv8使用IoU阈值和Distribution Focal Loss来分配正负样本,以平衡正负样本的数量和难易程度。
- Loss:YOLOv8使用Distribution Focal Loss作为损失函数,它在Focal Loss的基础上引入了分布信息,可以更好地处理类别不平衡问题。
两者推理过程的区别: 在推理过程中,YOLOv5和YOLOv8的主要差异在于coupled head和decoupled head的使用。coupled head是YOLOv5中的一种推理方式,它将Distribution Focal Loss中的积分表示bbox形式进行解码,变成常规的4维度bbox,然后进行后续计算。而decoupled head是YOLOv8中的一种推理方式,它直接使用Distribution Focal Loss中的积分表示bbox形式进行计算,不需要解码过程。
总结起来,YOLOv5和YOLOv8在架构和推理过程上有一些差异,包括主干网络、特征融合、检测头部、正负样本分配策略和损失函数等方面的差异。其中,在推理过程中,YOLOv5使用coupled head进行bbox解码,而YOLOv8使用decoupled head直接计算积分表示bbox。
YOLOv5的网络结构图如下所示:

YOLOv8的网络结构图如下所示:

说明:关于YOLOv8的简略网络架构图后续会推出,欢迎关注~!
YOLOv8的具体改进如下:
- Backbone:使用的依旧是CSP的思想,不过YOLOv5中的C3模块被替换成了C2f模块,实现了进一步的轻量化,同时YOLOv8依旧使用了YOLOv5等架构中使用的SPPF模块;
- PAN-FPN:YOLOv8依旧使用了PAN的思想,不过通过对比YOLOv5与YOLOv8的结构图可以看到,YOLOv8将YOLOv5中PAN-FPN上采样阶段中的CBS 1*1的卷积结构删除了,同时也将C3模块替换为了C2f模块;
- Decoupled-Head:YOLOv8使用了Decoupled-Head;即通过两个头分别输出cls与reg的输出;
- Anchor-Free:YOLOv8抛弃了以往的Anchor-Base,使用了Anchor-Free的思想;
- Loss:YOLOv8使用VFL Loss作为分类损失(实际训练中并未使用),使用DFL Loss+CIOU Loss作为分类损失;
- label assignmet:YOLOv8抛弃了以往的IoU匹配或者单边比例的分配方式,而是使用了Task-Aligned Assigner匹配方式。
💥💥3.2 性能评价
YOLOv8是一种目标检测算法,它在YOLOv7的基础上进行了改进和优化。下面是YOLOv8的优缺点:
优点:
- 高速度:YOLOv8是一种实时目标检测算法,具有较快的检测速度。它通过将目标检测任务转化为单次前向传播的问题,实现了实时检测。
- 高准确率:YOLOv8采用了一系列的改进措施,如使用更深的网络结构、引入注意力机制等,提高了检测的准确率。
- 多尺度检测:YOLOv8使用了多尺度检测策略,可以检测不同大小的目标。它通过在不同尺度下进行检测,并将结果融合,提高了检测的鲁棒性和准确性。
缺点:
- 目标小尺寸检测效果较差:由于YOLOv8采用了多尺度检测策略,对于小尺寸的目标检测效果相对较差。这是因为小目标在低分辨率下容易丢失细节信息。
- 对密集目标的检测效果较差:YOLOv8在处理密集目标时可能会出现重叠检测的问题,导致检测结果不准确。
- 训练需要大量的数据和计算资源:为了获得较好的检测效果,YOLOv8需要大量的标注数据和计算资源进行训练,这对于一些资源有限的场景可能存在挑战。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!