计算机体系结构----重排序缓冲(ROB)
发布时间:2024年01月10日
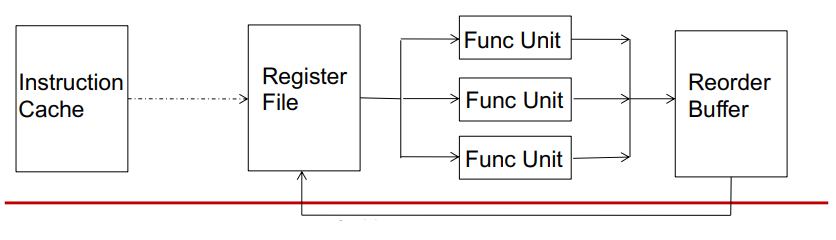
ROB的思想:不按顺序完成指令,但在使结果对体系结构状态可见之前重新排序
- 当指令被解码时,它会在 ROB 中保留下一个顺序条目
- 当指令完成时,它将结果写入 ROB 条目
- 当指令在 ROB 中最早并且无一例外地完成时,其结果移动到寄存器堆或存储器中
- 缓冲有关已解码但尚未停用(retire)/提交(commit)的所有指令的信息
重排序缓冲的条目ROB Entry
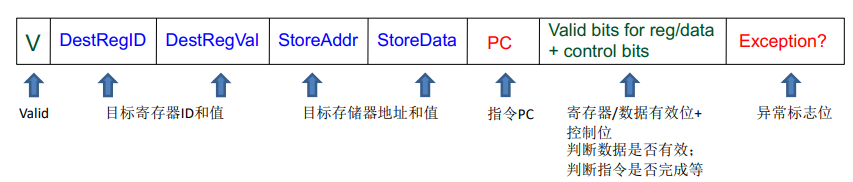
- 正确地将指令重新排序回程序顺序
- 使用指令的结果更新架构状态,如果指令可以毫无问题地退出
- 精确处理异常/中断,如果需要在停用指令之前处理异常/中断
- 需要有效位来跟踪结果的准备情况,并找出指令是否已完成执行
ROB是环形缓冲器
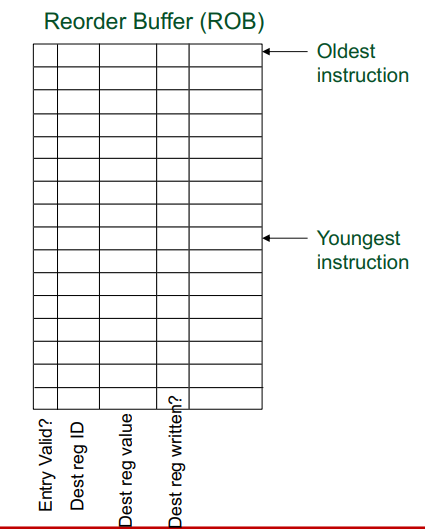
ROB存在两个指针,一个用来指示最早进入ROB的指令,一个用来指示最晚的。
Tomasulo系统复习
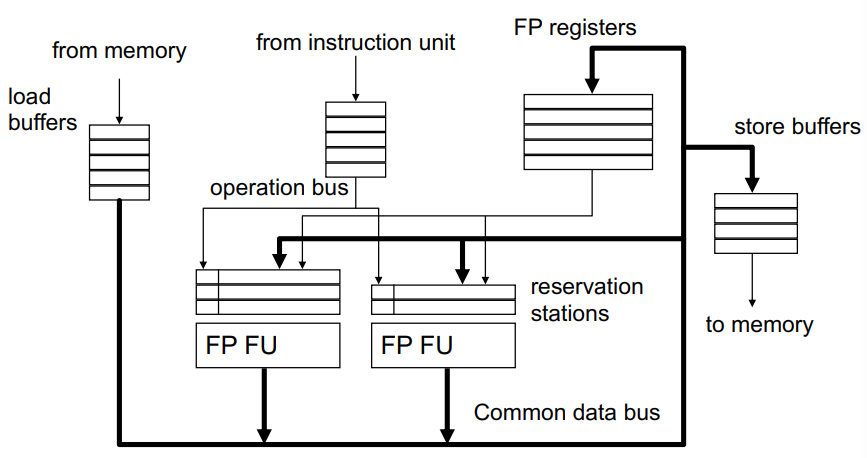
详细的Tomasulo系统解释点击这个:计算机体系结构----寄存器重命名/Tomasulo算法
Tomasulo+ROB
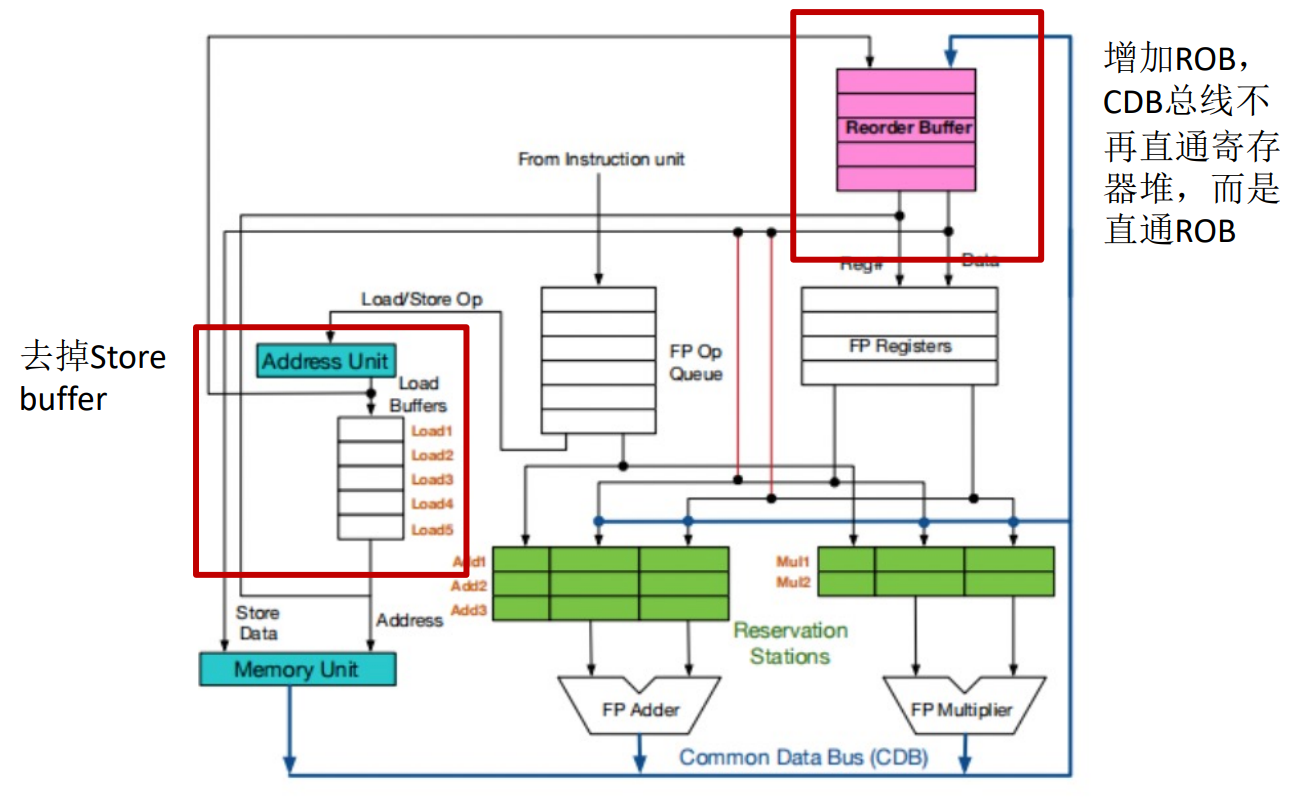
- 在指令完成时首先将结果写入 ROB
- 在提交时将结果写入寄存器堆
- 如果后面的指令需要重排序缓冲区中的值怎么办?
- 一种选择:流水线停顿
- 更好的做法:从重排序缓冲区中读取值。
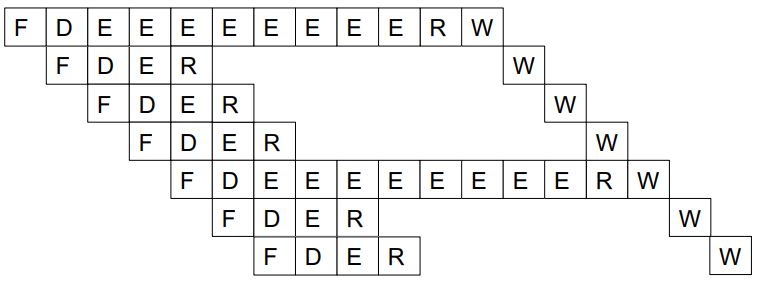
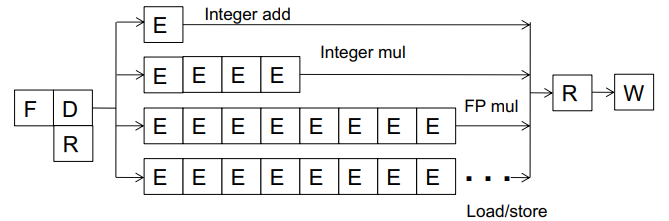
一个简易的假如ROB的流水线示意图如下:
访问ROB的方法1
寄存器值可以位于寄存器堆、重新排序缓冲区(或旁路/转发路径)中。
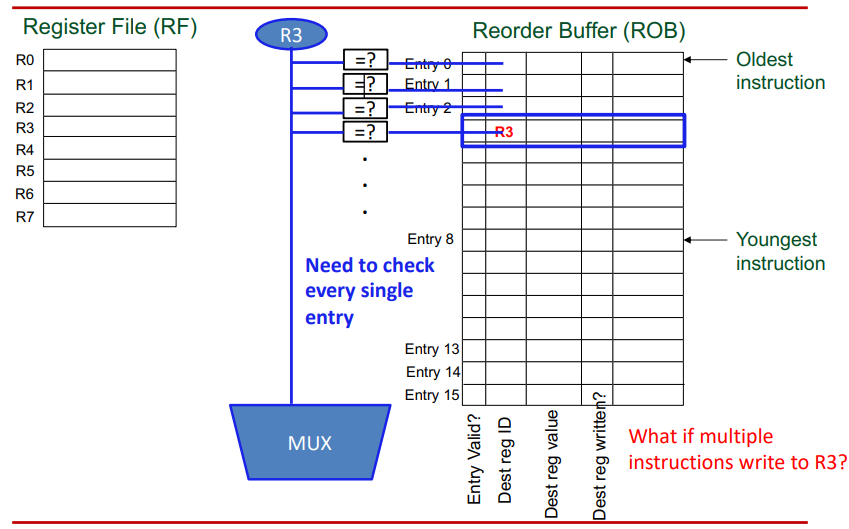
看上图可以发现,访问ROB中所需求的寄存器的值就是遍历法,从上往下一一比对ROB Dest reg ID 直到一样。
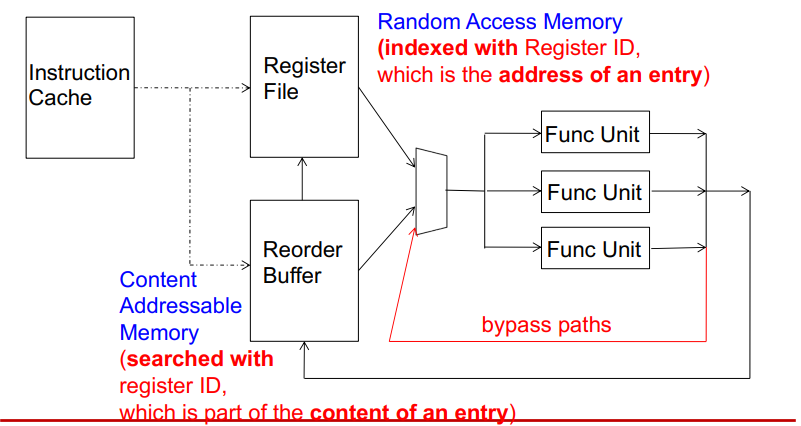
访问ROB的方法2
- 首先访问寄存器堆(检查寄存器是否有效)
- 如果寄存器无效,寄存器堆存储包含(或将包含)寄存器值的重新排序缓冲区条目的 ID
- 寄存器到 ROB 条目的映射: 如果寄存器堆有写入寄存器的飞行指令,则寄存器堆将寄存器映射到重新排序缓冲区条目
- 访问重新排序缓冲区
- 现在, 重新排序缓冲区不需要是内容可寻址的
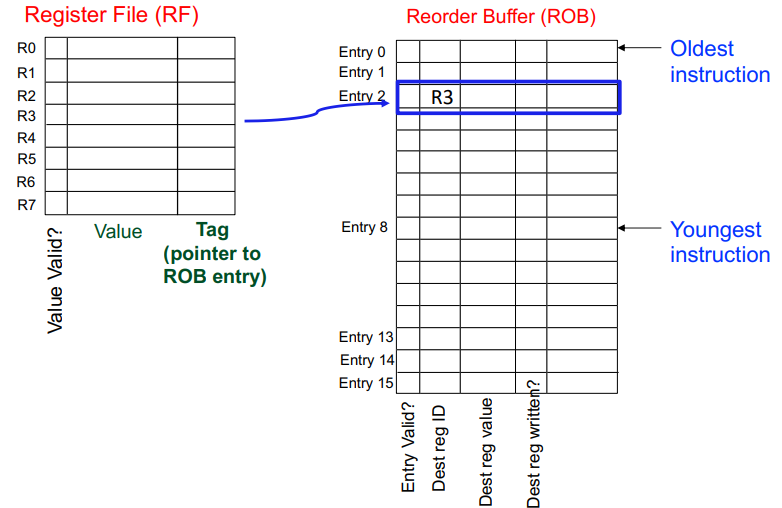
相较于访问ROB方法1,方法2在寄存器堆中添加了Tag位,用于直接映射到ROB的条目,方便寻找。
ROB的流水线构造
- Decode(D):访问regfile/ROB,在ROB中分配条目,检查指令是否可以执行,如果可以,则调度指令
- Execute (E):指令可以无序完成
- Completion (R):将结果写入重新排序缓冲区
- Retirement/Commit (W):检查异常;如果没有,则将结果写入架构寄存器文件或存储器;否则,刷新流水线并从异常处理程序开始
- 按顺序调度/执行、无序完成、按顺序停用(retirement)
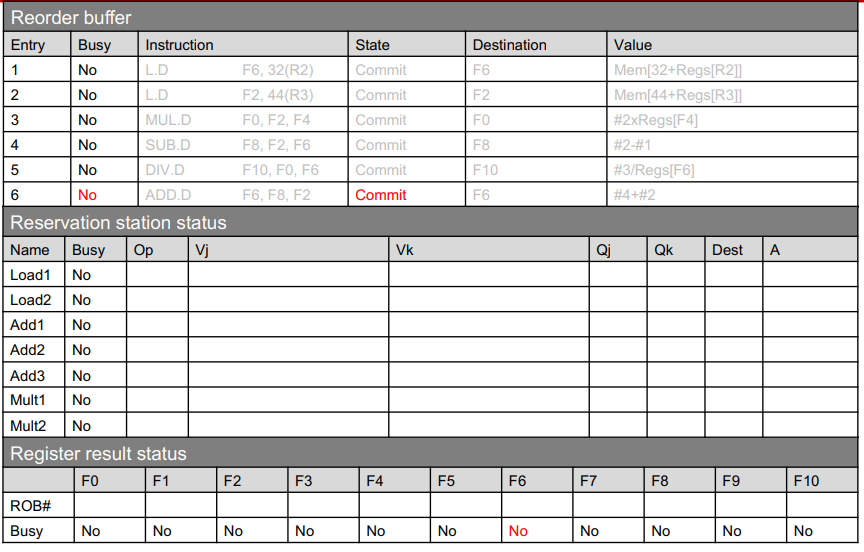
Tomasulo+ROB运行示例
初始状态
假设延时:Load:1, Add:2, Mult:6, Divide:12
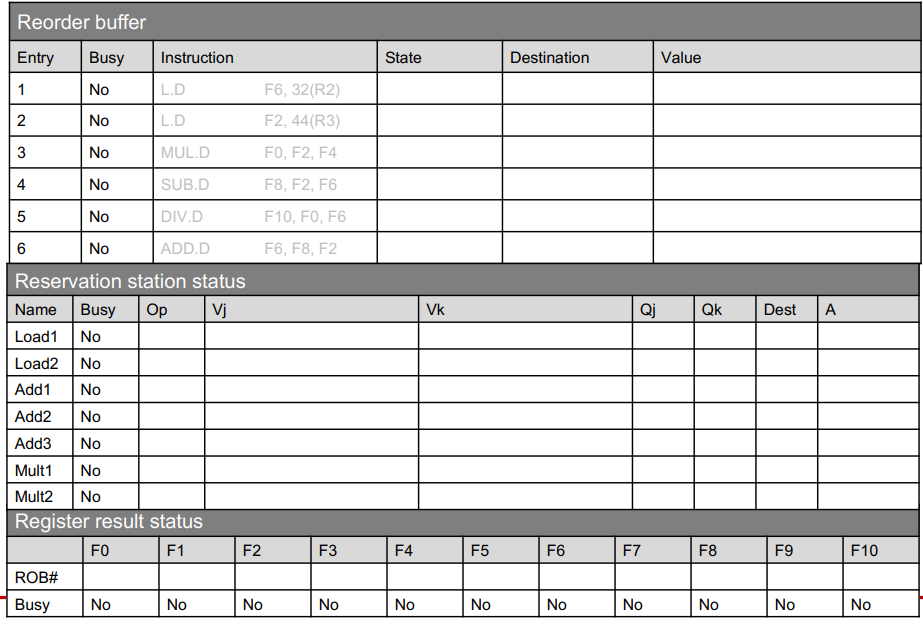
可以发现 ,每条指令都在ROB中有一个条目(entry)
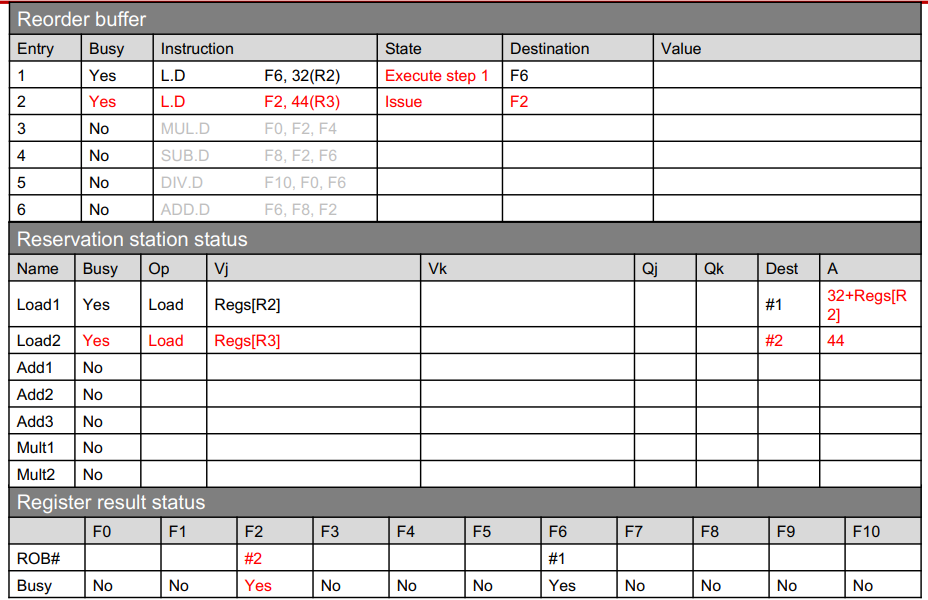
CC1:第一条Load发射

CC2:第一条Load完成地址计算;第二条Load发射
CC3:第一条Load执行完毕;第二条Load等待;MUL.D发射
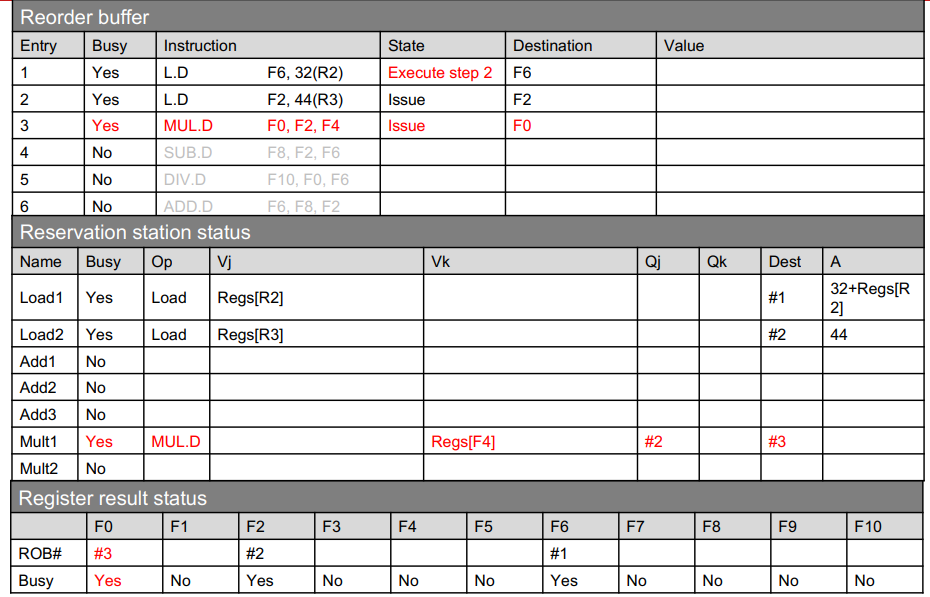
CC4:第一条Load写回完毕;第二条Load等待;MUL.D等待操作数;SUB.D发射
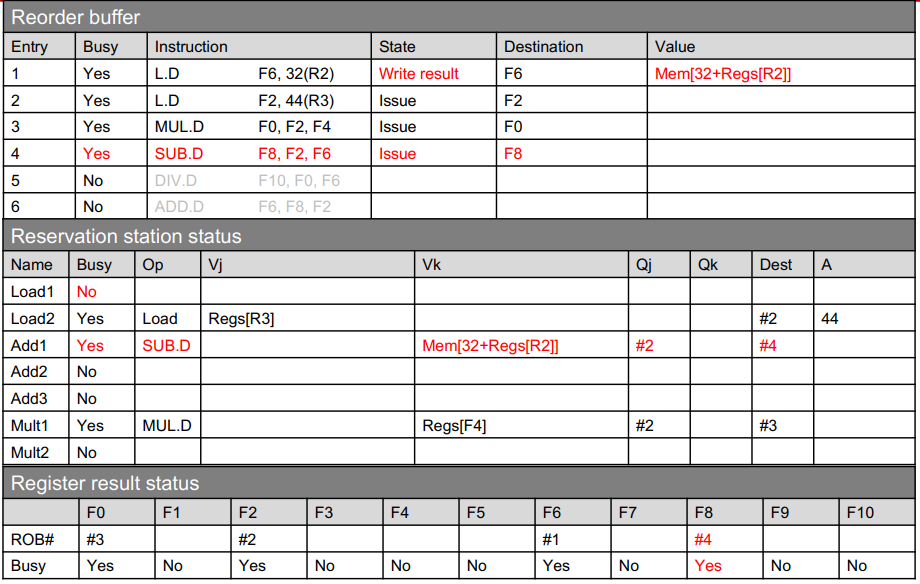
CC5:第一条Load提交;第二条Load完成地址计算;MUL.D/SUB.D等待操作数;DIV.D发射
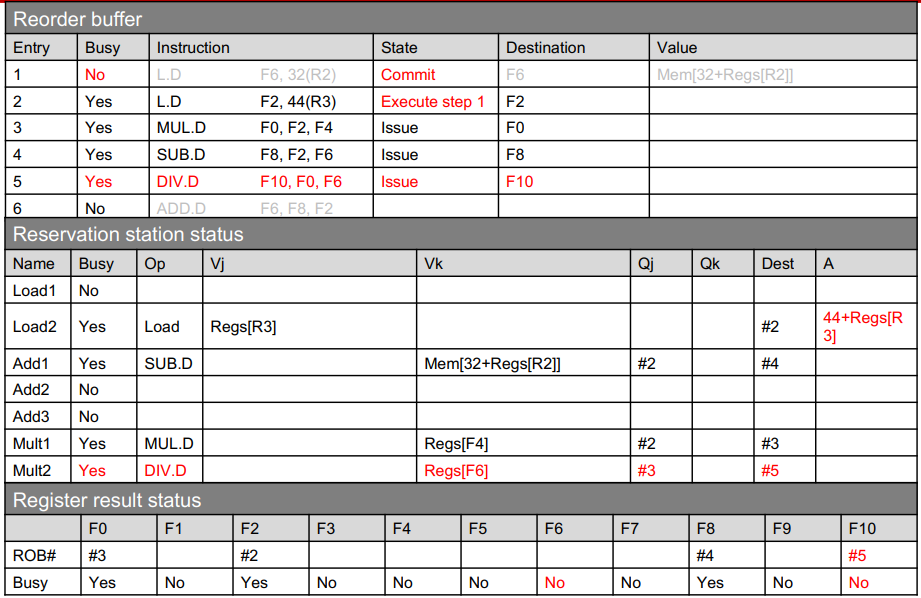
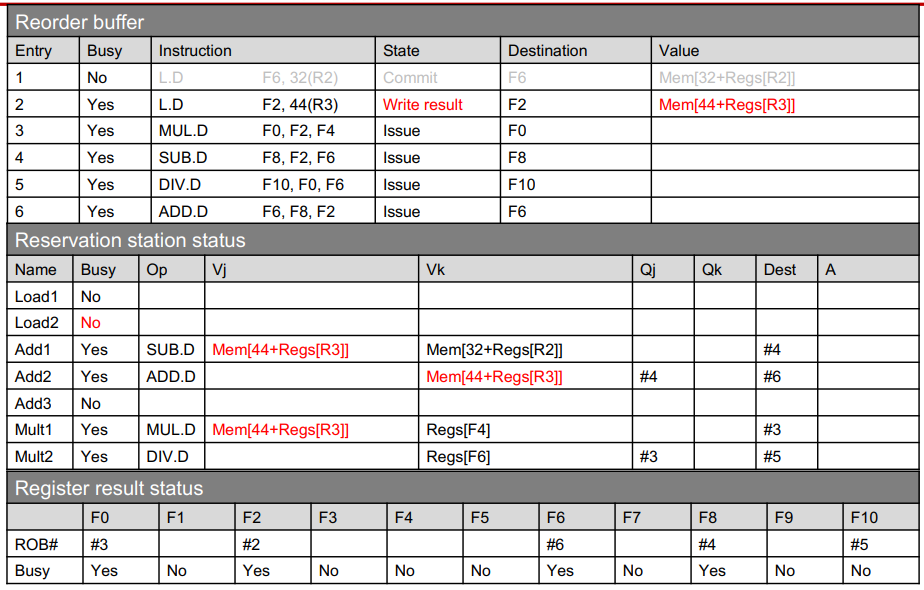
CC6:第二条Load执行完毕;MUL.D/SUB.D/DIV.D等待操作数;ADD.D发射

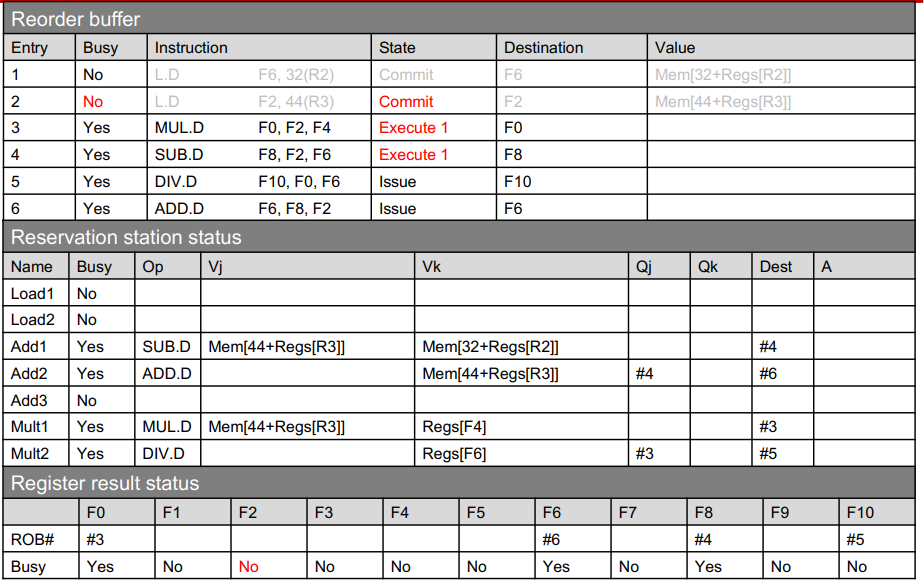
CC7:第二条Load写回完毕;MUL.D/SUB.D就绪;DIV.D/ADD.D等待操作数
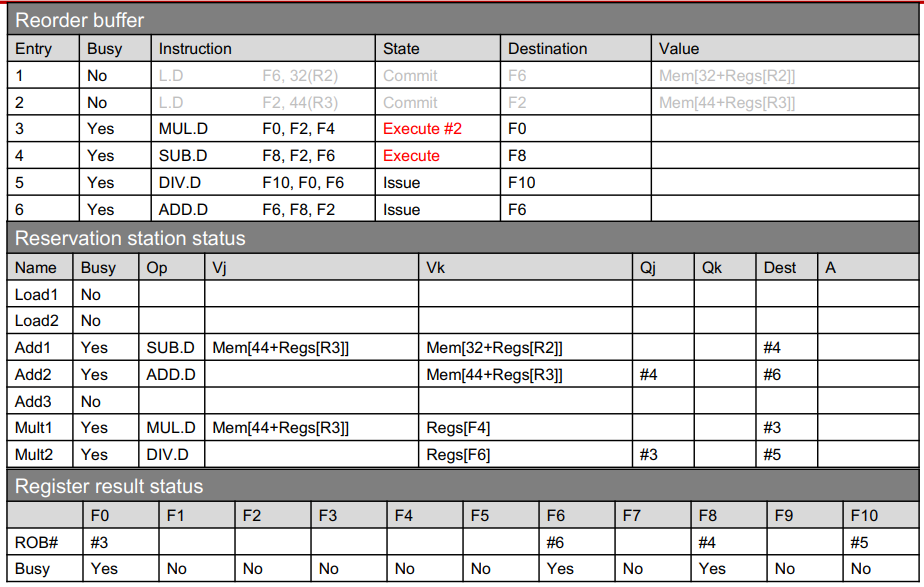
CC8:第二条Load提交;MUL.D/SUB.D执行完第一拍;DIV.D/ADD.D等待操作数
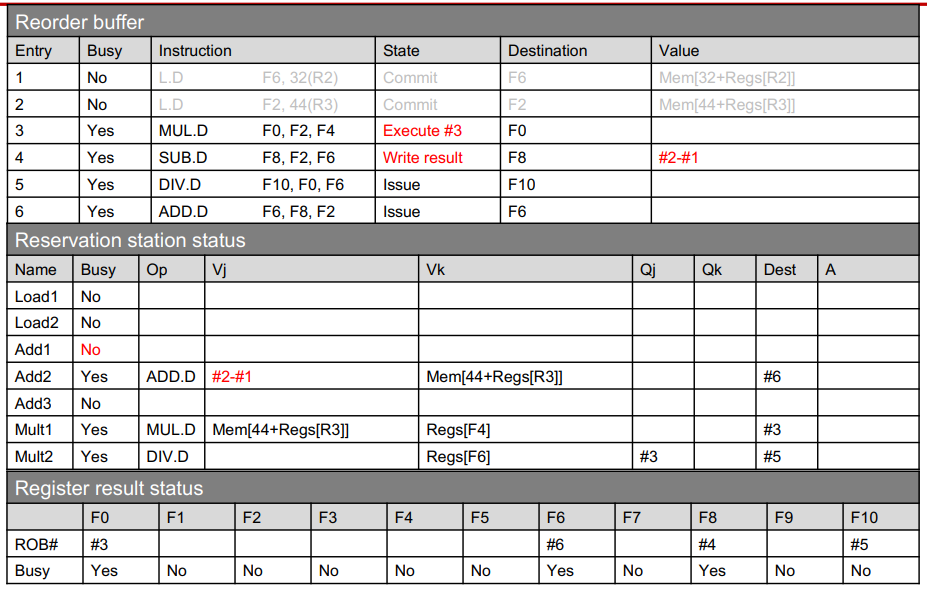
CC9:SUB.D执行完毕;MUL.D执行完第二拍;DIV.D/ADD.D等待操作数
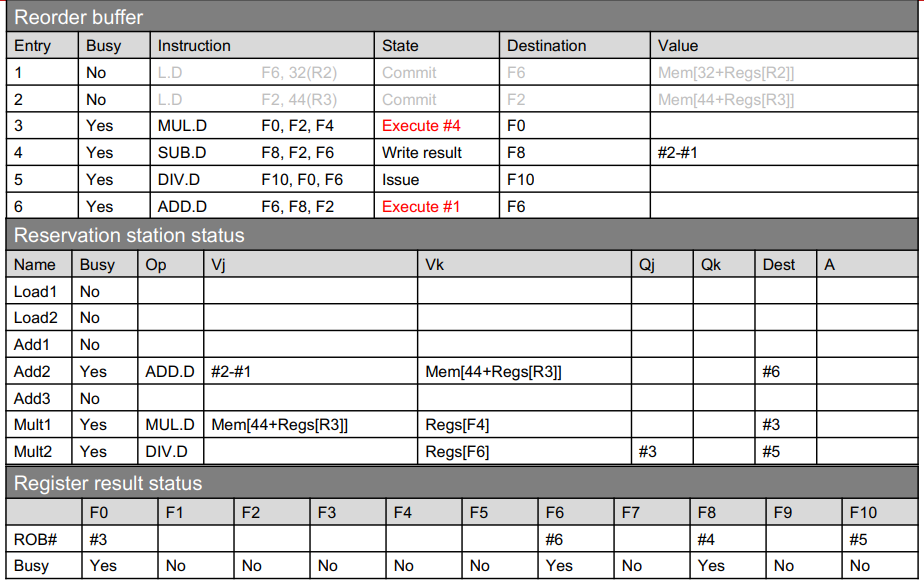
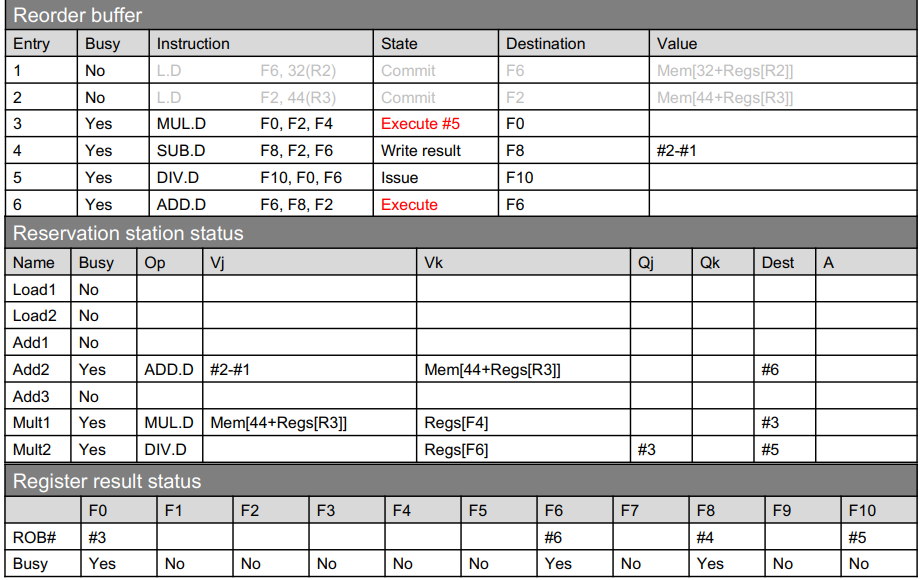
CC10:SUB.D写回完毕;MUL.D执行完第三拍;ADD.D就绪;DIV.D等待操作数
CC11:SUB.D等待提交;MUL.D执行完第四拍;ADD.D执行完第一拍;DIV.D等待操作数
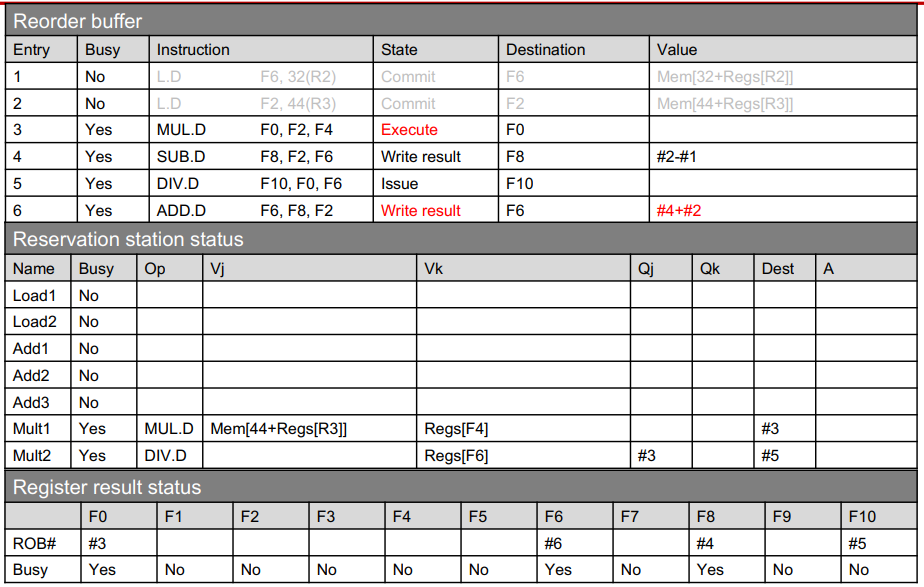
CC12:ADD.D执行完毕;SUB.D等待提交;MUL.D执行完第五拍;DIV.D等待操作数
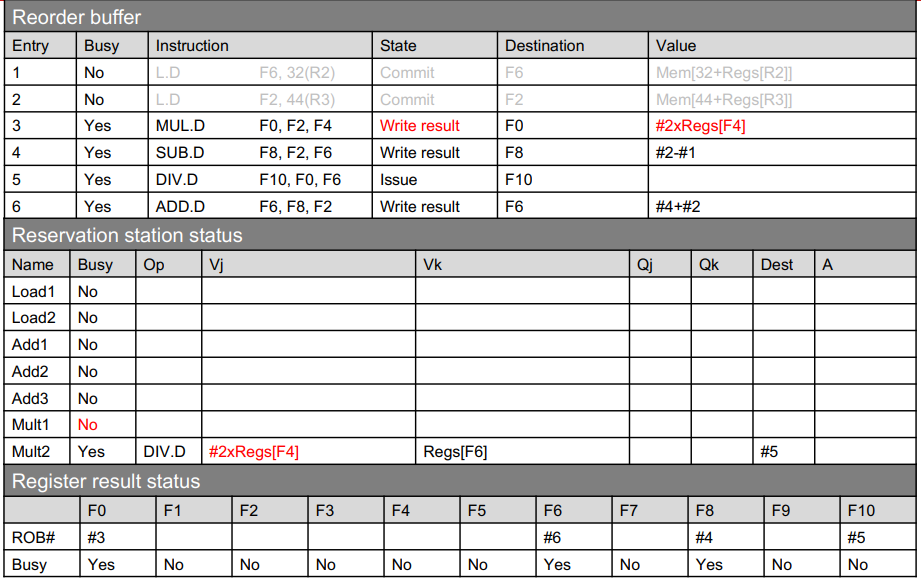
CC13:ADD.D写回完毕;MUL.D执行完毕;SUB.D等待提交;DIV.D等待操作数
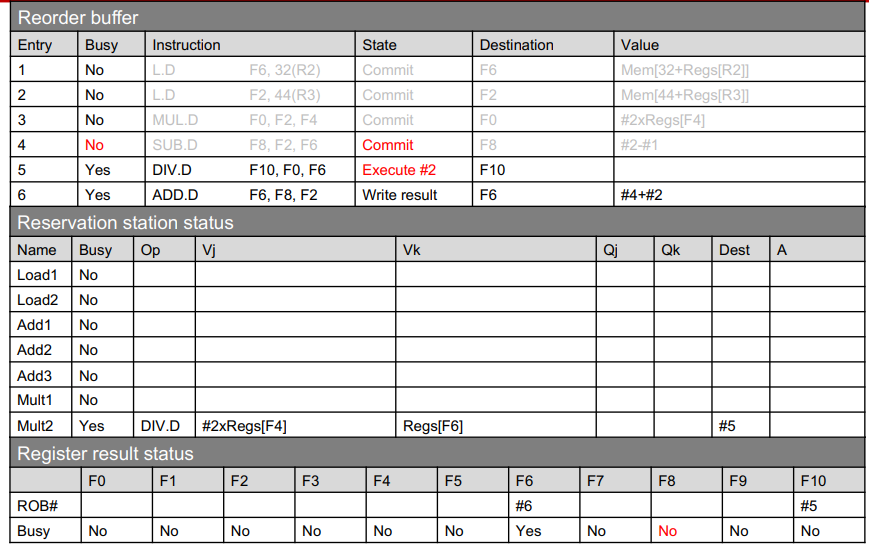
CC14:MUL.D写回完毕;DIV.D就绪;SUB.D/ADD.D等待提交
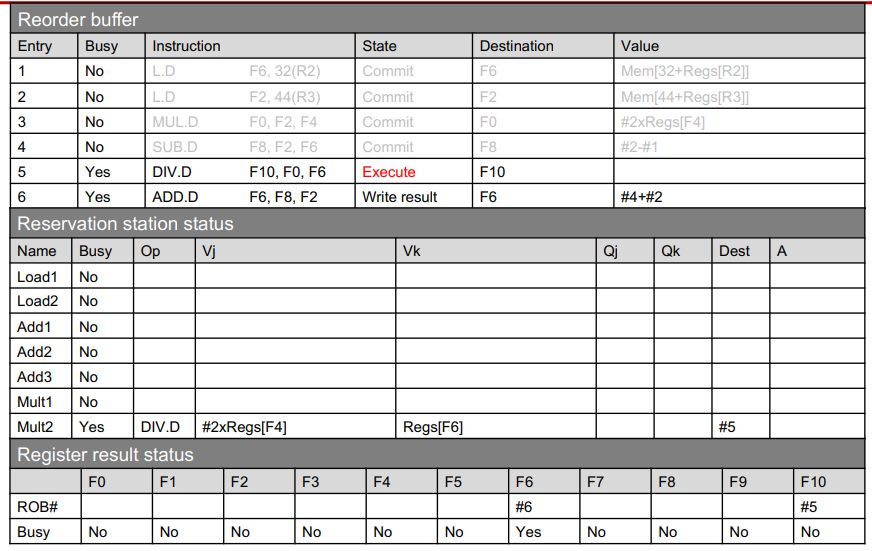
CC15:MUL.D提交;DIV.D执行完毕第一拍;SUB.D/ADD.D等待提交
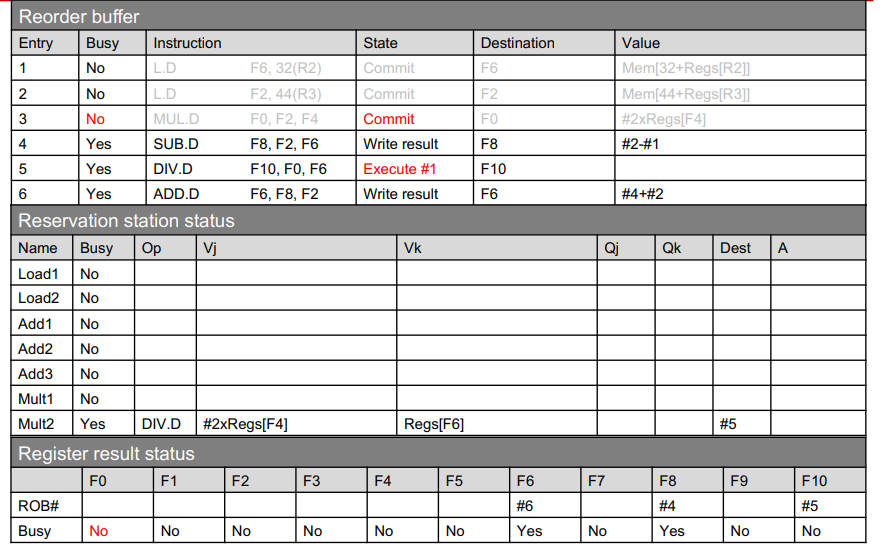
CC16:SUB.D提交;DIV.D执行完毕第二拍;ADD.D等待提交
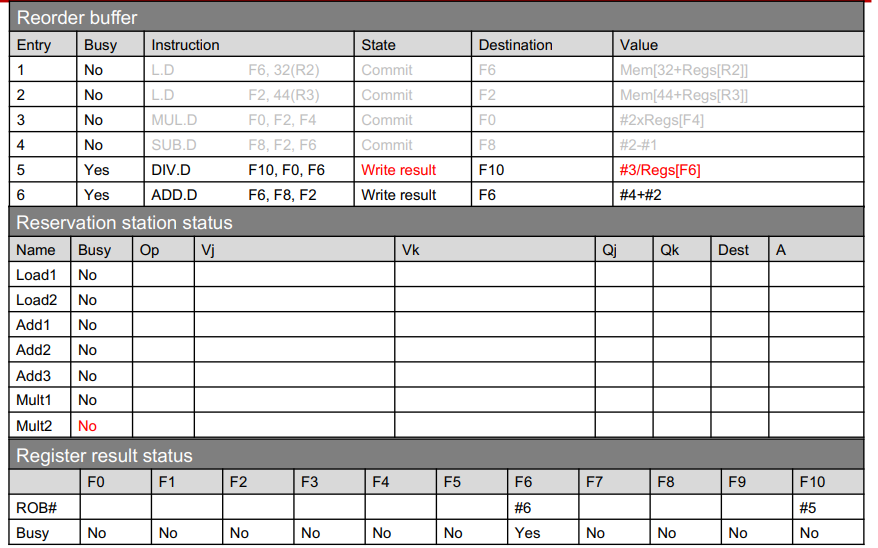
CC26:DIV.D执行完毕;ADD.D等待提交
CC27:DIV.D写回完毕;ADD.D等待提交
CC28:DIV.D提交;ADD.D等待提交
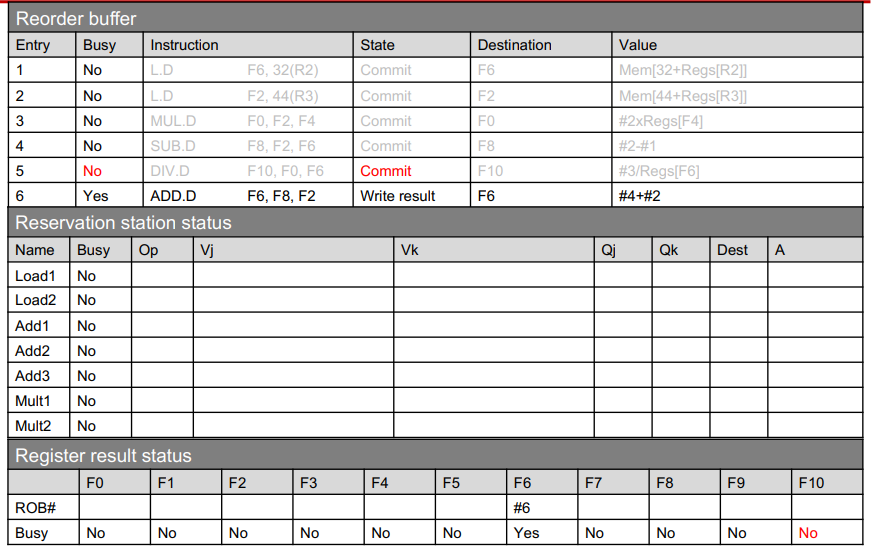
CC29:ADD.D提交
ROB的折衷
- 优点 :
- 概念简单,支持精确异常
- 可以消除错误的依赖性
- 缺点:
- 需要访问重新排序缓冲区以获得尚未写入寄存器文件的结果 ,CAM 或间接会增加延迟和复杂性
- 其他解决方案旨在消除缺点
- History buffer
- Future file
- Checkpointing
文章来源:https://blog.csdn.net/Programmer_jzm/article/details/135508847
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!