填充点云孔洞(较大的洞)halcon算法
发布时间:2024年01月01日
前言
很多时候,一些小洞可以通过平滑算法,或者三角化算法的参数调整,即可对较小的孔洞进行填充,但是较大的洞却很难通过上面的算法进行填充。
下面介绍一种填充孔洞的思路:
步骤一:对点云进行滤波处理,找到孔洞所在平面
本文为了更直观的进行讲解,去掉了去除噪声和滤波等操作,自己根据自己点云的情况进行相关操作,获取目标点云。
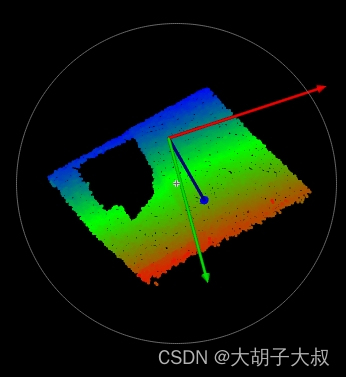
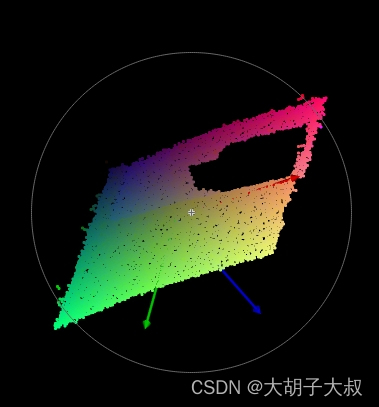
步骤二:对点云进行旋转,使孔洞可以投射到一个规则的面上
如xy平面上,或者自己倾向的某个平面都可以,在pcl中可以自己生成平面,并向该平面进行投影操作。
步骤三:对孔洞所在面进行投影操作,使之变成二维图
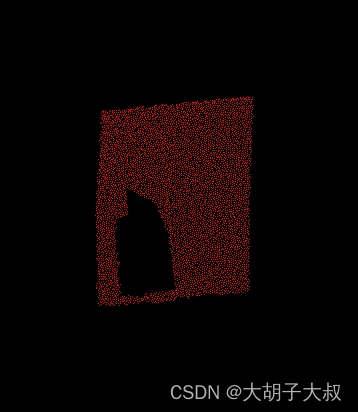
步骤四:对二维图进行分析,用fill_up和difference 即可得到孔洞的位置
文章来源:https://blog.csdn.net/sunnyrainflower/article/details/135325225
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Go和Java实现工厂方法模式
- 基于MATLAB计算无线通信覆盖(一)环境准备
- getattr() 函数的理解
- processing集训day01
- Gd-DOTA-SH钆-大环配体的结构特点 | 星戈瑞
- everything的使用技巧
- 【C++修行之道】竞赛常用库函数(sort,min和max函数,min_element和max_element、nth_element)
- 算法训练营Day41
- Vite scss 如何引入本地 字体
- 2024主流的免费电脑数据恢复软件EasyRecovery