OpenCV-Python(32):尺度不变特征SIFT算法
发布时间:2024年01月11日
目标
- 学习SIFT 算法的概念
- 学习在图像中查找SIFT关键点和描述符
原理及介绍
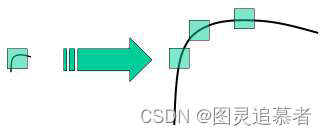
????????在前面两节我们学习了一些角点检测技术:比如Harris 等。它们具有旋转不变特性,即使图片发生了旋转,我们也能找到同样的角点。很明显即使图像发生旋转之后角点还是角点。但是,如果我们对图像进行缩放呢?角点可能就不再是角点了。以下图为例:在一副小图中使用一个小的窗口可以检测到一个角点,但是如果图像被放大,再使用同样的窗口就检测不到角点了。
????????所以在2004 年,D.Lowe 提出了一个新的算法,尺度不变特征变换(SIFT),这个算法可以帮助我们提取图像中的关键点并计算它们的描述符。
步骤
????????SIFT 算法主要由以下构成。接下来我们来分步来进行学习。?
尺度空间极值检测
关键点(极值点)定位
为关键点(极值点)指定方向参数
关键点描述符
????????新的关键点描述符被创建了。选取与关键点周围一个16x16 的邻域,把它分成16 个4x4 的小方块,为每个小方块创建一个具有8 个bin 的方向直方图。总共加加来有128 个bin。由此组成长度为128 的向量就构成了关键点描述符。除此之外,还要进行几个测量以达到对光照变化、旋转等的稳定性。
关键地匹配
????????下一步就可以利用关键点特征向量的欧氏距离来作为两幅图像中关键点的相似性判定度量。取第一个图的某个关键点,通过遍历找到第二幅图像中的距离最近的那个关键点。但有些情况下,第二个距离最近的关键点与第一个距离最近的关键点靠的太近。这可能是由于噪声等引起的。此时要计算最近距离与第二近距离的比值。如果比值大于0.8就忽略掉。这会去除?90% 的错误匹,同时只去除5% 的正确匹配。如文章所说。
? ? ? ? 这就是SIFT 算法的摘要。非常推荐你对原始文献进行阅读,会加深你对算法的理解。记住,个算法是受专利保护的。所以这个算法包含在OpenCV 中的收费模块中。
文章来源:https://blog.csdn.net/mzl_18353516147/article/details/135533583
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Android NestedScrollView悬浮固定顶部
- 使用Rancher管理Kubernetes集群
- 基于springboot+vue的旅游网站系统(前后端分离)
- 一个天气API接口返回今日天气+24小时天气+气象预警+空气质量指数
- 【问题系列】同时管理多版本node&方案
- PDA智能巡检系统
- Harmony 开始支持 Flutter ,聊聊 Harmony 和 Flutter 之间的因果
- C语言之字符串和指针
- 1.【Multisim仿真】数电模电学习,仿真软件的初步使用
- 锐意进取,蓬勃发展|爱基百客2023全景图