FreeRTOS-07任务切换 对vPortSVCHandler和xPortPendSVHandler的理解
任务的基本单位是TCB块,相当于任务的身份证,其基本成员包括栈指针,栈所在地址,链表节点地址,如下:
FreeRTOS.h
typedef struct tskTaskControlBlock
{
volatile StackType_t *pxTopOfStack; /* 栈顶 */
ListItem_t xStateListItem; /* 任务节点 */
StackType_t *pxStack; /* 任务栈起始地址 */
/* 任务名称,字符串形式 */
char pcTaskName[ configMAX_TASK_NAME_LEN ];
} tskTCB;
typedef tskTCB TCB_t;
vPortSVCHandler和xPortPendSVHandler讲解
FreeRTOS启动调度器时,将调用prvStartFirstTask启动第一个任务:
/*
* 参考资料《STM32F10xxx Cortex-M3 programming manual》4.4.3,百度搜索“PM0056”即可找到这个文档
* 在Cortex-M中,内核外设SCB的地址范围为:0xE000ED00-0xE000ED3F
* 0xE000ED008为SCB外设中SCB_VTOR这个寄存器的地址,里面存放的是向量表的起始地址,即MSP的地址
*/
__asm void prvStartFirstTask( void )
{
PRESERVE8
/* 在Cortex-M中,0xE000ED08是SCB_VTOR这个寄存器的地址,
里面存放的是向量表的起始地址,即MSP的地址 */
ldr r0, =0xE000ED08
ldr r0, [r0]
ldr r0, [r0]
/* 设置主堆栈指针msp的值 */
msr msp, r0
/* 使能全局中断 */
cpsie i
cpsie f
dsb
isb
/* 调用SVC去启动第一个任务 */
/*产生系统调用,服务号 0表示 SVC 中断,接下来将会执行 SVC 中
断服务函数*/
svc 0
nop
nop
}
vPortSVCHandler
第一个任务的加载通过触发SVC中断实现, SVC 中断要想被成功响应,其函数名必须与向量表注册的名称一致,在启动文件的向量表中,SVC 的中断服务函数注册的名称是 SVC_Handler,但是在 FreeRTOS 中,官方版本写的是 vPortSVCHandler(),为了能够顺利的响应 SVC 中断,FreeRTOS通过在FreeRTOSConfig.h 中添加添加宏定义的方法来修改函数名,对于PendSV和SysTick的处理同理。
FreeRTOSConfig.h
/* Definitions that map the FreeRTOS port interrupt handlers to their CMSIS
standard names. */
#define vPortSVCHandler SVC_Handler
#define xPortPendSVHandler PendSV_Handler
/* IMPORTANT: FreeRTOS is using the SysTick as internal time base, thus make sure the system and peripherials are
using a different time base (TIM based for example).
*/
#define xPortSysTickHandler SysTick_Handler
vPortSVCHandler()函数开始真正启动第一个任务,不再返回,实现如下
port.c
__asm void vPortSVCHandler( void )
{
extern pxCurrentTCB;
PRESERVE8
/* Get the location of the current TCB. */
ldr r3, =pxCurrentTCB //r3=&pxCurrentTCB,即r3指向当前执行任务的TCB指针所在地址
ldr r1, [r3] //r1=*r3=pxCurrentTCB,既让r1指向当前任务的TCB
ldr r0, [r1] //r0=*r1=pxTopOfStack,即让r0执行当前任务栈顶
/* Pop the core registers. */
//将当前任务栈内容pop,保存入cpu寄存器,注意序号小的寄存器会先被pop,所以pop顺序:r4...r10,r11
//调用最后一行bx r14时,剩下的 xPSR、PC、LR、R12、R3 - R0会自动出栈
ldmia r0!, {r4-r11}
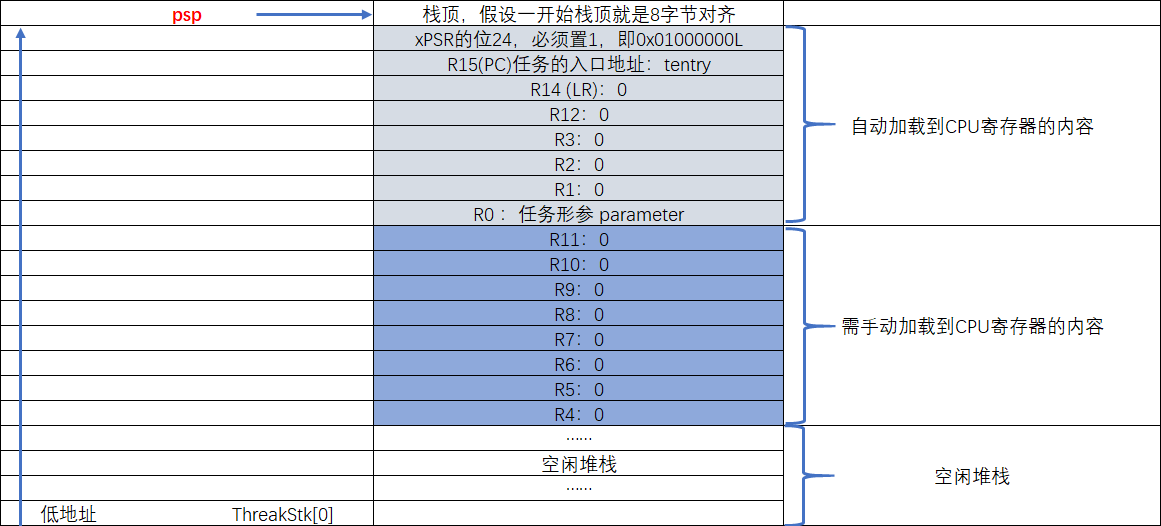
msr psp, r0 // 将当前任务栈顶赋给psp, 即psp = pxTopOfStack,执行后效果如图1所示
isb // 指令同步隔离,确保之前的指令都已执行完毕
// r0清0,用于关中断
//设置 basepri 寄存器的值为 0,即关闭所有中断。basepri 是一个中断屏蔽寄存器,大于等于此寄存器值的中断都将被屏蔽,但如果设置成0,则不关闭任何中断
mov r0, #0
msr basepri, r0
//任务上下文加载完毕,中断执行结束,返回用户线程
//在ARM中,使用r14来保存子程序的返回地址(即上一个程序的地址),执行后效果如图2所示
bx r14
}
这里代码中的pxCurrentTCB是当前执行的任务指针,定义在task.c
/* 当前正在运行的任务的任务控制块指针,默认初始化为NULL */
TCB_t * volatile pxCurrentTCB = NULL;
图1, msr psp, r0执行后效果:
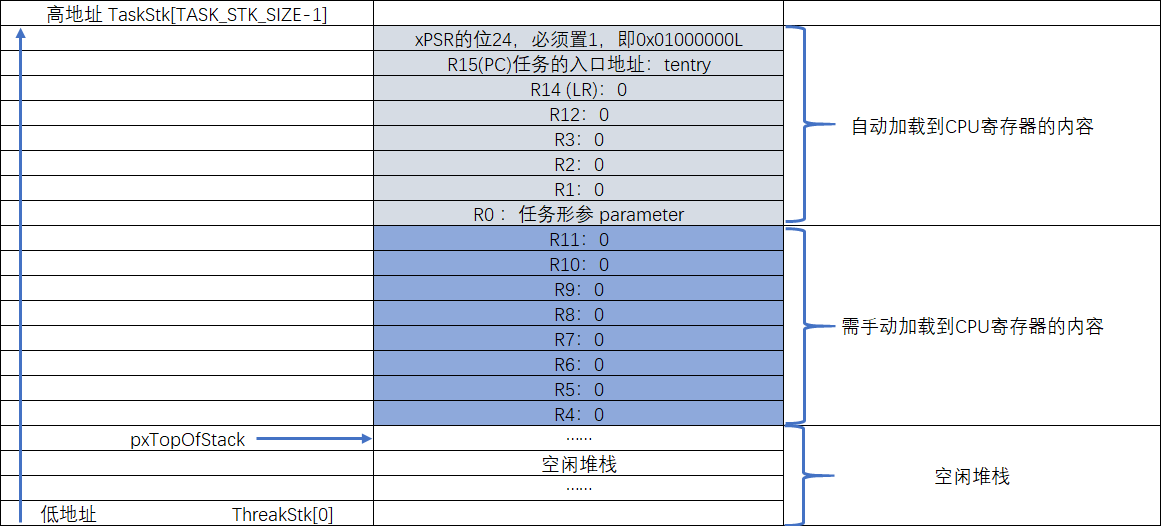
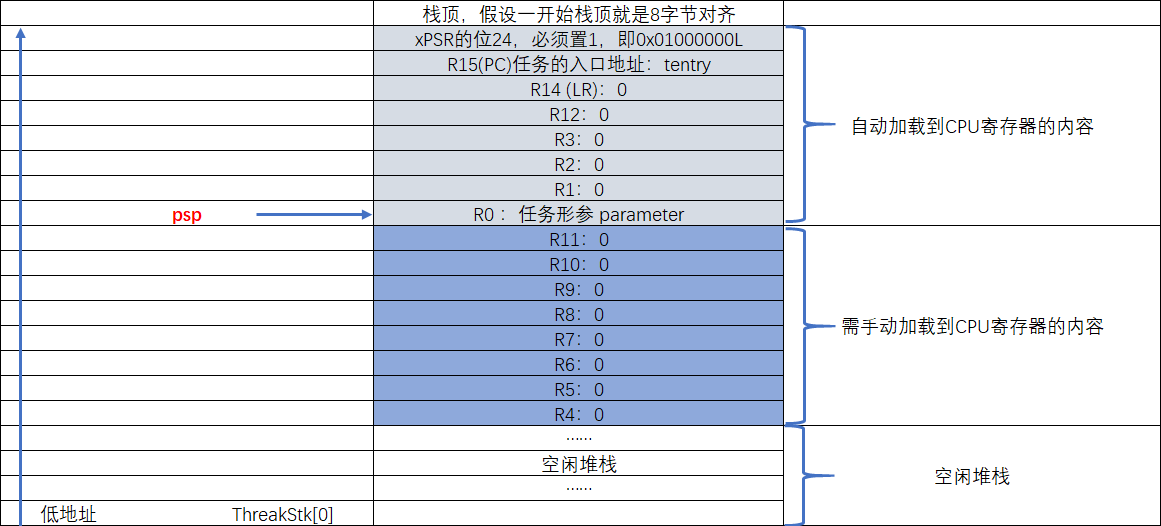
图2,bx r14执行后效果, 这个时候出栈使用的是 PSP 指针,自动将栈中的剩下内容加载到 CPU 寄存器: xPSR,PC(任务入口地址),R14,R12,R3,R2,R1,R0(任务的形参)同时 PSP 的值也将更新,即指向任务栈的栈顶
这里要注意一下LDR的使用。LDR有指令和伪指令两种用法,一定要区分开。
区别一
ldr r3, = 变量
ldr r3, = 标号
ldr r3, = 立即数
区别二
ldr r3, = 立即数
ldr r3, 立即数 , 就是把立即数这个地址中的值存放到r0中
步骤:
pxCurrentTCB 是一个指针变量,指向当前运行任务的TCB。
首先将pxCurrentTCB 的 地址赋给r3,即 r3 = & pxCurrentTCB ;
然后把pxCurrentTCB 的值赋值给r1,即r1 = pxCurrentTCB 。
最后pxCurrentTCB所指的TCB的第一个成员变量(任务堆栈地址)赋给r0,即r1 = [r3] = *pxCurrentTCB= pxCurrentTCB->pxTopOfStack
把人为入栈的寄存器r4 - r11手动出栈,剩下的 xPSR、PC、LR、R12、R3 - R0会自动出栈。
把出栈完成之后的栈顶地址赋给psp,供任务使用。
这里要注意的就是第一句,是把pxCurrentTCB 的地址赋值给r3,而不是把他的值赋值r3。
xPortPendSVHandler
__asm void xPortPendSVHandler( void )
{
extern uxCriticalNesting;
extern pxCurrentTCB;
extern vTaskSwitchContext;
PRESERVE8
/*r0=psp, 进入PendSV中断时,上个任务环境即
xPSR,PC,R14,R12,R3,R2,R1,R0这些将自动保存入任务栈,
剩下R4-R11需要手动保存,同时PSP将自动更新(在更新之前 PSP 指向任务栈的栈顶),
此时 PSP是"上文"任务的堆栈指针,具体指向见图3*/
mrs r0, psp
isb //确保之前指令已执行(为什么mrs或者msr执行完之后就要接一个isb或者dsb?不知道)
/* Get the location of the current TCB. */
ldr r3, =pxCurrentTCB //r3=&pxCurrentTCB
ldr r2, [r3] //r2=*r3=pxCurrentTCB
/* Save the core registers. */
stmdb r0!, {r4-r11} //将cpu寄存器保存入"上文"任务栈,注意push总是先push序号大的,因此push顺序:r11,r10....r4
/* Save the new top of stack into the first member of the TCB. */
str r0, [r2] //*r2=r0 => pxTopOfStack=p0, 更新"上文"任务的栈顶
stmdb sp!, {r0, r3} //入栈栈顶指针和pxCurrentTCB,这个栈的指针是MSP,注意顺序:r3,r0
/* 至此,上下文切换的"上文"环境保存完成 */
//关中断,高于configMAX_SYSCALL_INTERRUPT_PRIORITY的中断都将被屏蔽,configMAX_SYSCALL_INTERRUPT_PRIORITY的值在FreeRTOSConfig.h定义
mov r0, #configMAX_SYSCALL_INTERRUPT_PRIORITY
msr basepri, r0
dsb //数据隔离,同步之前对msr的操作
isb //指令隔离,确保之前所有指令已执行完毕,之后的指令使用的是正确的basepri配置
bl vTaskSwitchContext //跳转到vTaskSwitchContext函数去执行,pxCurrentTCB将被更改指向下一个任务
//开中断
mov r0, #0
msr basepri, r0
ldmia sp!, {r0, r3} //从MSP栈加载r0和r3,此时r3已经指向新任务pxCurrentTCB的地址值,注意pop顺序:r0,r3
/* 以下为上下文切换的"下文"环境切换 */
/* The first item in pxCurrentTCB is the task top of stack. */
ldr r1, [r3] //r1=*r3=pxCurrentTCB,即新任务的TCB
ldr r0, [r1] //r0=*r1=pxTopOfStack,即新任务的栈顶指针
/* Pop the core registers. */
ldmia r0!, {r4-r11} //将新任务的任务栈数据加载入cpu寄存器r4-r11
/* 更新psp的值,等PendSV退出时,会以psp作为基地址,将任务栈中剩下的内容自动加载到CPU寄存器 */
/* 剩下的内容包括: xPSR、PC、LR、r12、r3、r2、r1、r0 */
msr psp, r0
isb
bx r14 //中断结束返回
}
图3,mrs r0, psp 执行后
总结
其实看懂代码之后就知道上下文切换的实质是将哪个任务栈的数据加载入cpu寄存器中,新任务加载时,旧任务的数据将由cpu寄存器通过汇编代码加载回其任务栈,然后屏蔽中断,调用切换函数修改当前指向的TCB,再恢复中断,通过新任务的TCB将新任务的任务栈数据加载入cpu, 自此切换完成。
这里最难的理解点就是vPortSVCHandler和xPortPendSVHandler的代码了,需要对Cotrex内核和arm汇编有基本的了解,可以看下Cortex-M3权威指南的第三(了解寄存器和栈)和第四章(arm指令集)入门,我这里卡了很久。
参考:
【FreeRTOS】xPortPendSVHandler任务切换代码分析
https://blog.csdn.net/tao475824827/article/details/105622087
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【图像拼接】论文精读:Minimum Barrier Salient Object Detection at 80 FPS(MBS/MBD)
- Swift 响应式编程:简化 KVO 观察与 UI 事件处理 | 开源日报 No.110
- MyBatis-Plus
- Ajax Search Pro Live WordPress网站内容实时搜索插件
- C++函数对象-函数包装器-(std::bad_function_call)
- 计算机通信:FTP协议详解
- c/c++中static的用法
- MySQL深入——15
- php 使用box打包
- staging-数据管道-处理原则的体验