(ros2)控制gazebo移动的话题:
发布时间:2024年01月03日
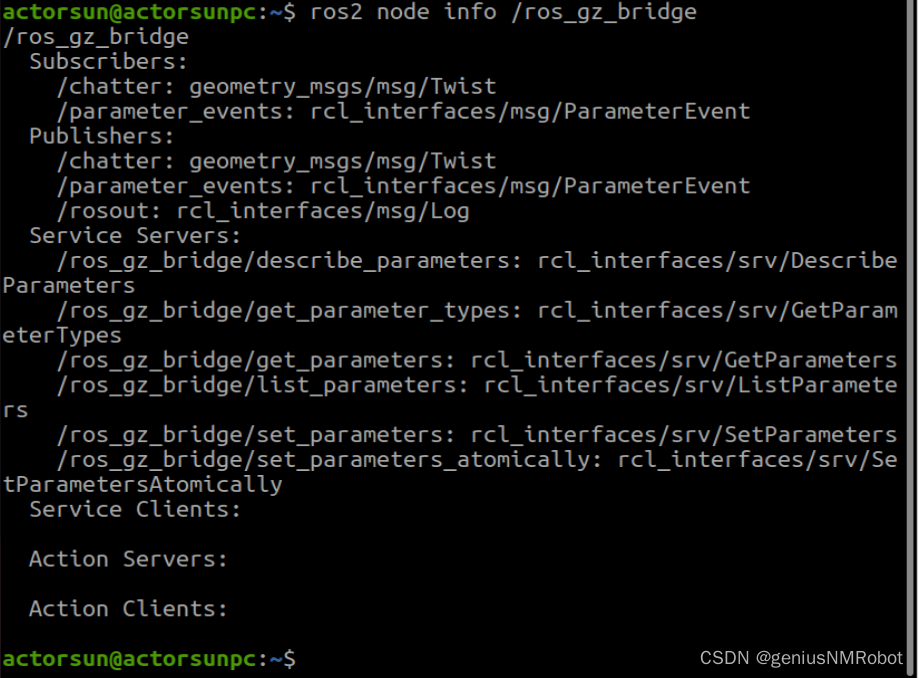
gazebo并不是ros2内自带的,是一个独立的软件,需要安装ros_gz功能被把ros2消息转换为gazebo可以识别的命令,并且把gazebo状态转换为ros2信息,所以可以认为ros_gz_bridge节点就是gazebo,
这个节点只接收2个话题:很可能/chatter话题就是接收控制信息的。可以看奥消息类型跟/cmd_vel的消息类型是一样的
如果要接收控制信息估计要使用重定向。<remap>
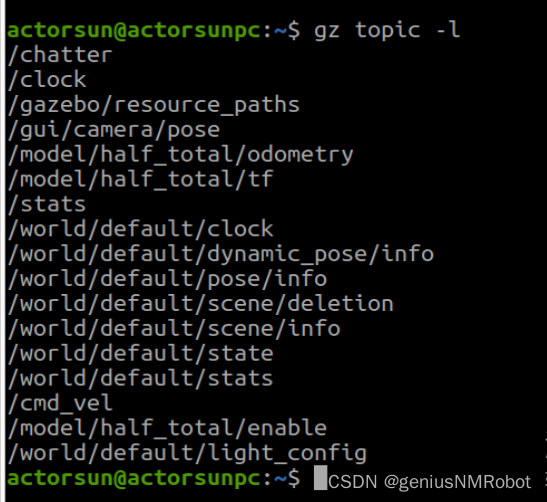
好像不是/chatter,好像是/cmd_vel啊
?看动起来了,哈哈
<launch>
<group>
<let name="robot_description" value="$(command 'xacro $(find-pkg-share gazebo_pkg)/urdf/total.xacro')"/>
<node pkg="rviz2" exec="rviz2" name="rviz2" output="screen"/>
<!--rviz2 need this node below-->
<node pkg="robot_state_publisher" exec="robot_state_publisher" name="robot_state_publisher">
<param name="robot_description" value="$(var robot_description)"/>
</node>
<node name="joint_state_publisher" exec="joint_state_publisher" pkg="joint_state_publisher"/>
<include file="$(find-pkg-share ros_gz_sim)/launch/gz_sim.launch.py">
<arg name="gz_args" value="-v 4 default.sdf"/>
</include>
<node pkg="ros_gz_sim" exec="create" args="-world default -file $(find-pkg-share gazebo_pkg)/urdf/total.urdf">
</node>
<node pkg="ros_gz_bridge" exec="parameter_bridge" args="/cmd_vel@geometry_msgs/msg/Twist@ignition.msgs.Twist"/>
</group>
</launch>
文章来源:https://blog.csdn.net/geniusChinaHN/article/details/135370019
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 如何彻底卸除Microsoft Edge浏览器
- ansible-playbook的Temlates模块 tags模块 Roles模块
- 【华为OD题库-101】查找舆情热词-java
- 3分钟了解Android中稳定性测试
- promise到底是个什么??
- MySQL练习-DDL语法练习
- [kubernetes]基于版本v1.28.5+containerd + helm 搭建集群
- L1-007 念数字
- 位移运算【Java】
- 基于海思SD3403/3519AV200的医疗内窥镜技术框架