使用级联毫米波传感器的成像雷达参考设计2(TI文档)
3.4 级联雷达信号处理链
3.4.1 MIMO雷达信号处理链
?????? 以MIMO模式收集的原始信号按照图16所示的流程进行处理。
图16 MIMO信号处理链

3.4.1.1 ADC数据读取和校准
????????每次数据采集后,将保存4个级联设备对应的二进制数据文件和相应的chirp配置文件。这两个文件是ADC数据读取和校准模块的输入。二进制数据文件是根据基于数据格式的chirp参数,每个chirp采样,每帧chirp,TX/RX通道的数量来读取/解析的。然后将数据重新格式化为4D矩阵,其中包含每个chirp的采样维数,每帧chirp数,RX通道数和TX通道数。每个TX/RX通道根据预先计算的校准矩阵进行校准,可以使用第3节中描述的程序获得校准矩阵。(参考)
3.4.1.2 距离/多普勒FFT
????????对于每个TX/RX通道,进行距离FFT,然后进行多普勒FFT。默认窗口是汉宁窗口。FFT的大小被确定为最接近2的幂的整数。
3.4.1.3 检测
????????距离/多普勒FFT输出送到检测模块。第一步是跨所有虚拟通道的非相干积累。积累输出经过CFAR检测步骤,先进行1D距离CFAR检测,然后在被检测距离单元处进行1D多普勒CFAR检测。对于每个交叉检测距离/多普勒点,采用最大速度扩展算法修正时分多普勒MIMO可能造成的速度模糊。恢复的速度用于纠正相位跳变,这也是由时分多址MIMO对每个检测点造成的。
3.4.1.4 角度估计
????????对于每个检测点,基于相位校正后的信号矢量进行角度估计。如果配置的阵列仅为方位角方向,则只需要方位角估计。如果涉及二维配置阵列,则执行方位角和仰角估计。请注意,方位角方向上会检测到多个角度,但在仰角方向上只选择最大峰值。
3.4.1.5 GUI
?????? 点云和热图能被发送到GUI显示。
3.4.2 TXBF信号处理
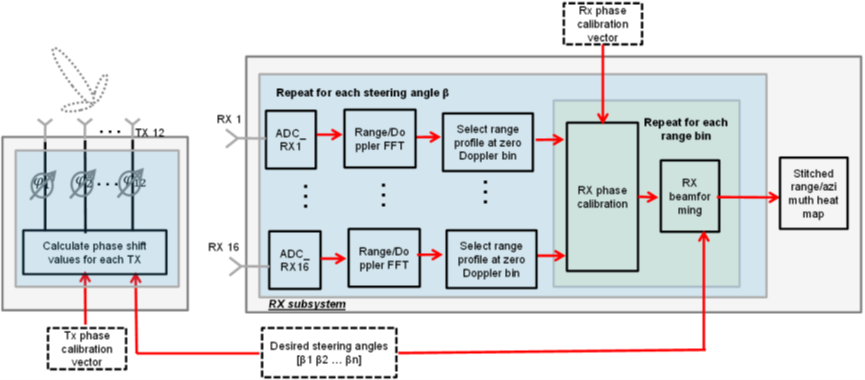
?????? 本节提供一个TX波束形成模式下信号处理链的示例。根据不同的应用,用户可能有自己更好的信号链。该示例信号处理链通过将多个TX波束形成扫描拼接在一起来生成方位/距离热图。
????????图17显示了在TX波束形成模式下示例信号处理链的框图。所需的转向角定义为β1 β2…βn。对于每个角度βi,根据给定TX天线位置的TX相位校准向量和βi计算移相器值(见2.3.3节)。从每个RX通道接收到的ADC数据经过距离和多普勒FFT,假设它是静态测试场景,只有零多普勒单元被选择用于距离/方位热图生成。对于移动的测试场景,用户需要进行相应的更改。对于零多普勒的每个距离单元,在使用校准矢量进行相位补偿后,执行RX波束形成以将RX波束引导到TX通道聚焦的相同βi。因此,每个角度βi生成一条距离线。通过拼接所有不同βi角度生成的线,生成距离/方位角热图。
图17 TX波束形成信号处理链
????????图18显示了示例热图结果。两个角反射器在微波暗室内6米处相隔约1.8度。微波暗室尺寸约为6 m宽,12 m长。雷达被放置在离一侧4米远的地方。左上角和右上角的图是在MIMO模式和拼接TX波束形成模式下运行的热图结果(俯视图)。TX波束在[-60 -60]范围内转向,步长为0.5度。矩形对应微波暗室墙壁,中间的两个亮点对应两个角反射器。左下角和右下角是三维视图下的热图结果,高度表示反射强度。两个峰的分离在3D视图中更加明显。值得注意的是,由于RX波束形成过程中的抵消,相邻TX通道距离较宽导致的栅瓣不再被观测到。
图18 热图-MIMO和拼接TXBF-俯视图
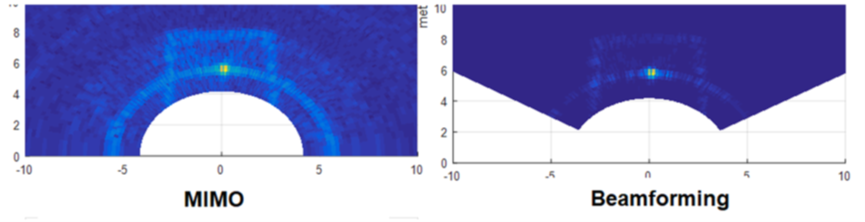
图19 热图-MIMO和拼接TXBF-三维视图
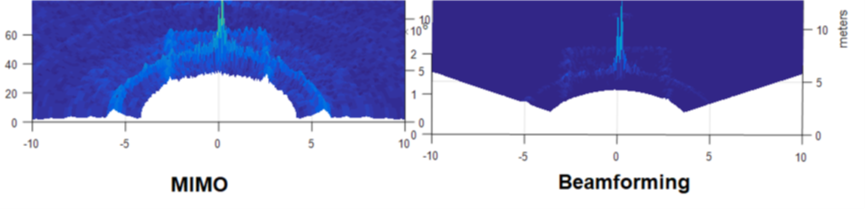
?????? 实验结果表明,由于有效孔径大小相同,两种工作模式下的接收角分辨率是相等的。此外,由于TX波束形成模式的相干增益,波束形成模式中的信号信噪比要高得多。通过增加chirp积累时间,可以提高MIMO模式下的信噪比。
4 硬件、软件、测试需求和测试结果
4.1 需要的硬件和软件
4.1.1 硬件
????????测试使用德州仪器公司的老一代AWR1243P四器件级联雷达射频板以及基于TDA2的采集系统进行。使用新一代传感器AWR2243,射频性能得到了改善,如AWR2243数据表所示。
图20 四设备级联雷达射频板,使用基于TDA2的采集板

4.1.2 软件
????????级联板使用MMWAVE-STUDIO工具的更新版本进行配置。使用Matlab实现的算法对采集的原始数据进行后处理。
4.2 测试和结果
????????设置了多个测试场景,以探索级联雷达射频设计在MIMO和TXBF操作中的能力。
????????这里提供的所有数据都是用上面提到的硬件收集的。
4.2.1 测试场景
4.2.1.1 MIMO测试场景
?????????实验室角分辨率
?????????并排汽车检测分辨率
?????????汽车,行人和其他目标近距离分离
?????????汽车轮廓和方向
?????????车门轮廓
?????????自行车轮廓和方向
?????????栅栏轮廓检测
?????????路沿轮廓检测
4.2.1.2 TXBF测试场景
?????????实验室波束形成控制方向图
?????????行人远程检测
?????????汽车中程检测
?????????汽车远程检测
4.2.2 MIMO测试结果
4.2.2.1 实验室角分辨率
????????在微波暗室雷达测试距离内进行了基本方位分离试验。在距离毫米波传感器8 m处放置两个角反射器,角距约为1.5度。
????????在当前的配置中,方位轴上有86个虚拟阵列阵元,每个阵元的间距为lambda/2,最好的情况下可以实现1.4度的角分辨率。该系统测得的分离度为1.5度,接近期望值。
图21 两个角反在方位上以1.5度分离
图22 距离-多普勒FFT图,显示两个角反检测到的分离的峰值
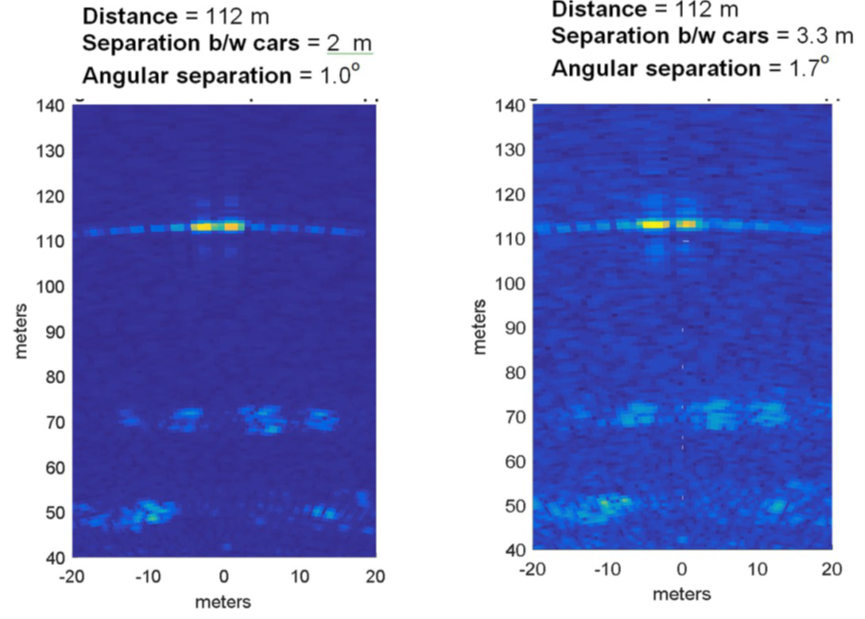
4.2.2.2 汽车角度分辨率场景
?????? 在距离传感器112米的不同角度距离处,两辆车进行了测试,再次展示了AWR2243 MIMO雷达的角度分辨率能力。
图23 两车角度分离测试设置
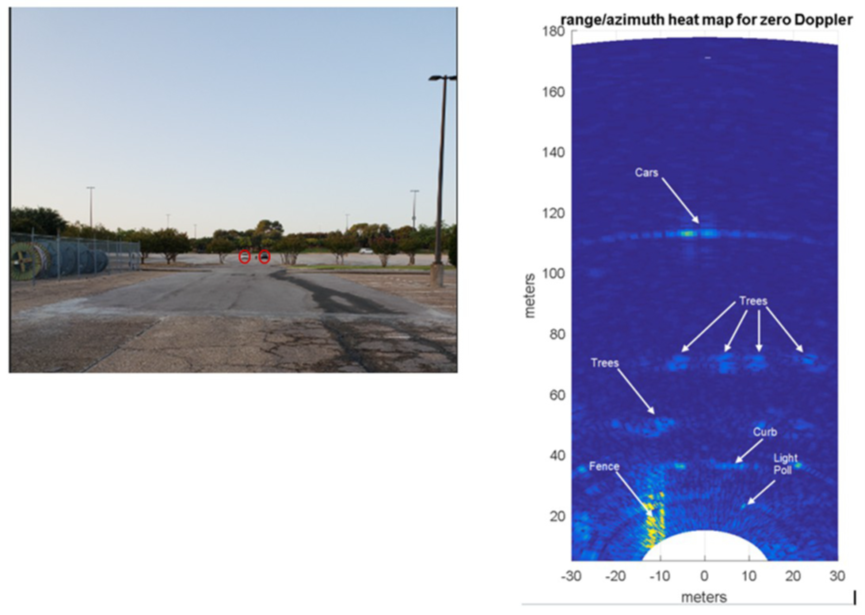
图24 两车角度分离测试结果
4.2.2.3 汽车、行人和其他目标近距离分离
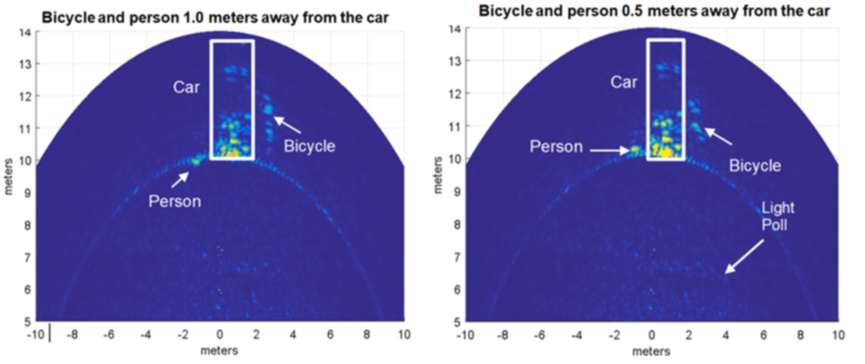
?????? 测试表明,AWR2243 MIMO雷达能够在远离汽车的不同横向距离上区分人和自行车。在行人(或另一个低RCS目标)与汽车(高RCS目标)占据相同距离单元的情况下,这将是一个挑战。
图25 自行车和人离车1.5m
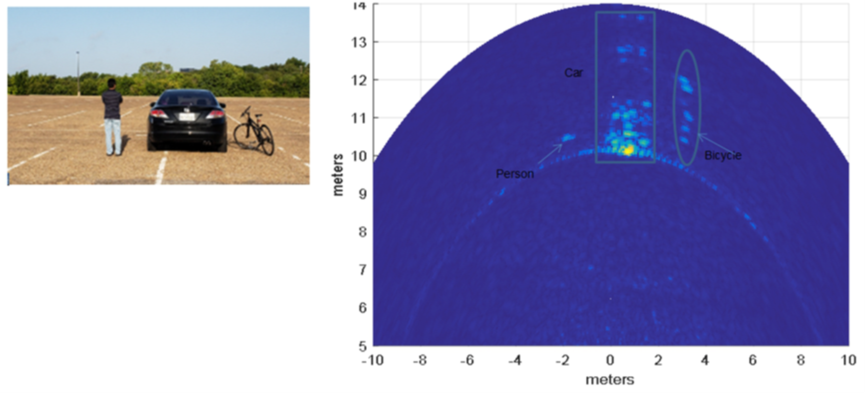
图26 自行车和行人离车1m(左)、0.5m(右)
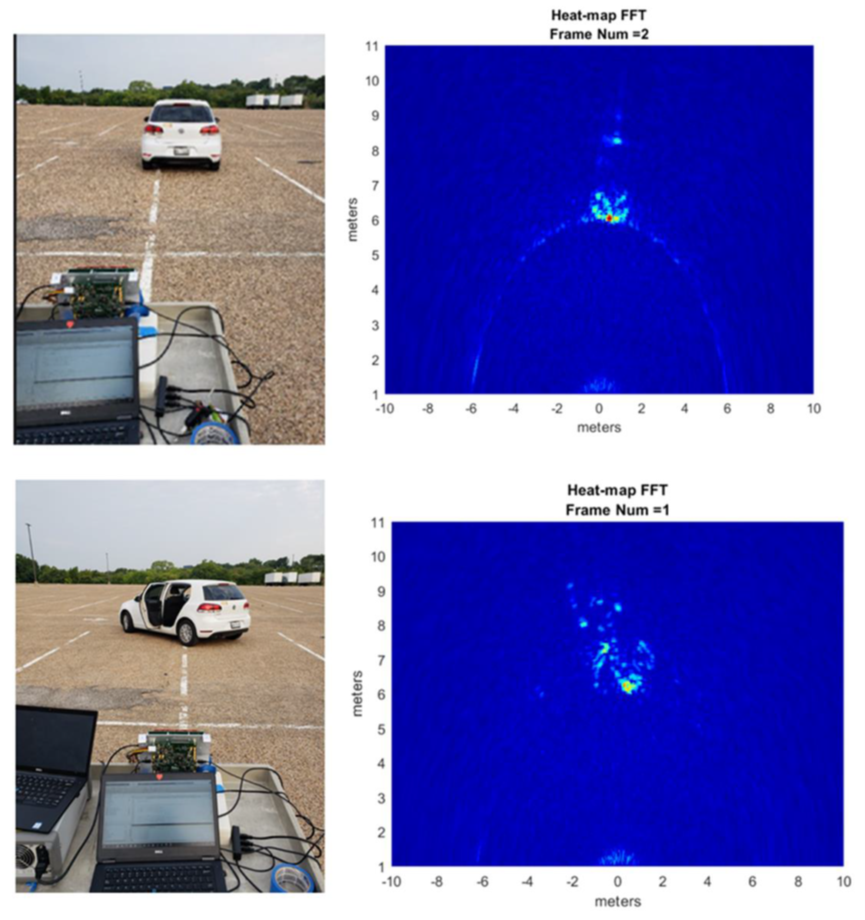
4.2.2.4 汽车轮廓和朝向
????????测试表明,AWR2243 MIMO雷达可以检测汽车的轮廓和方向。方位和距离分辨率允许检测许多车辆表面的轮廓。
图27 汽车在0度(上)汽车打开门(下)朝向和相应的方位角距离热图
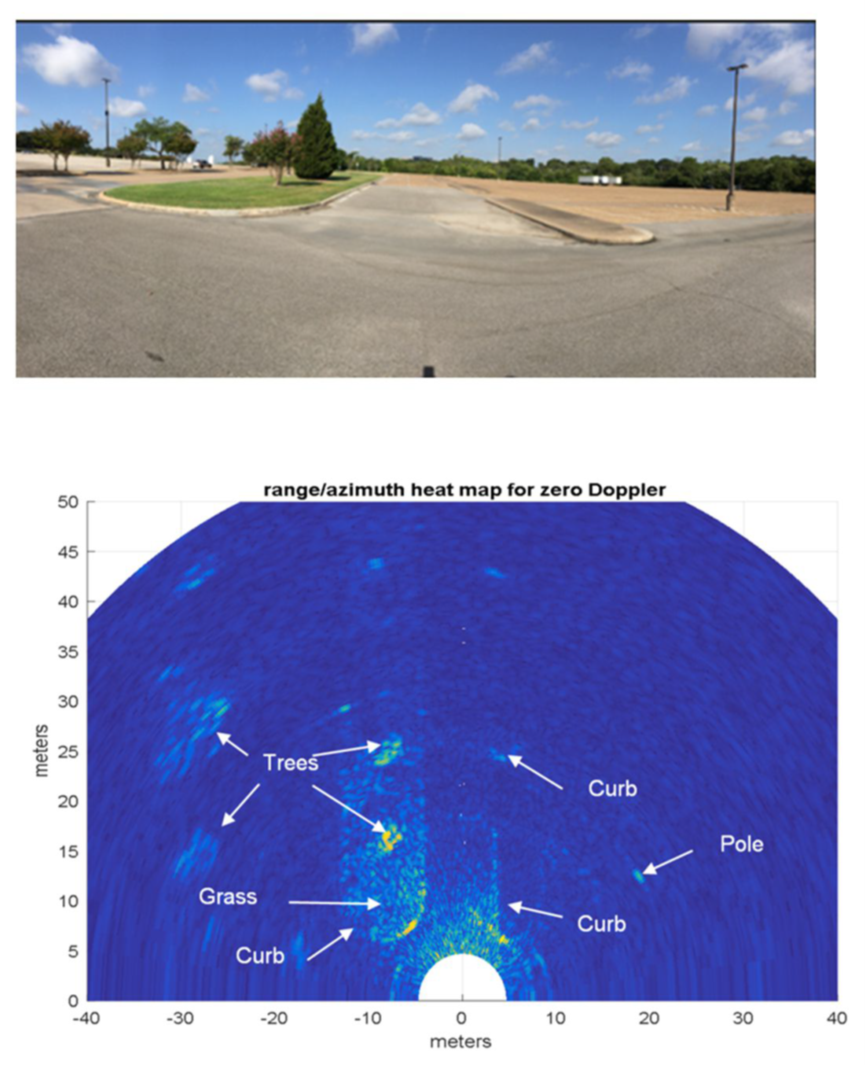
4.2.2.5 路沿轮廓检测
????????一项测试显示,AWR2243 MIMO雷达可以在停车场环境中检测多个路沿的轮廓和方向。方位角和距离分辨率允许检测这些较短的驾驶障碍的轮廓。
图28 停车场路沿场景(上)和产生的方位距离热图(下)
4.2.3 TXBF结果
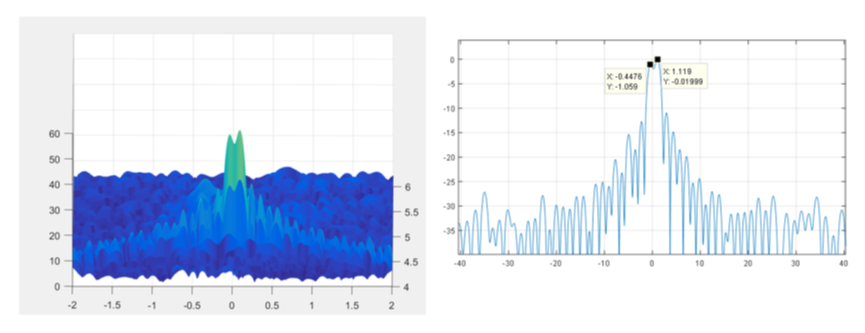
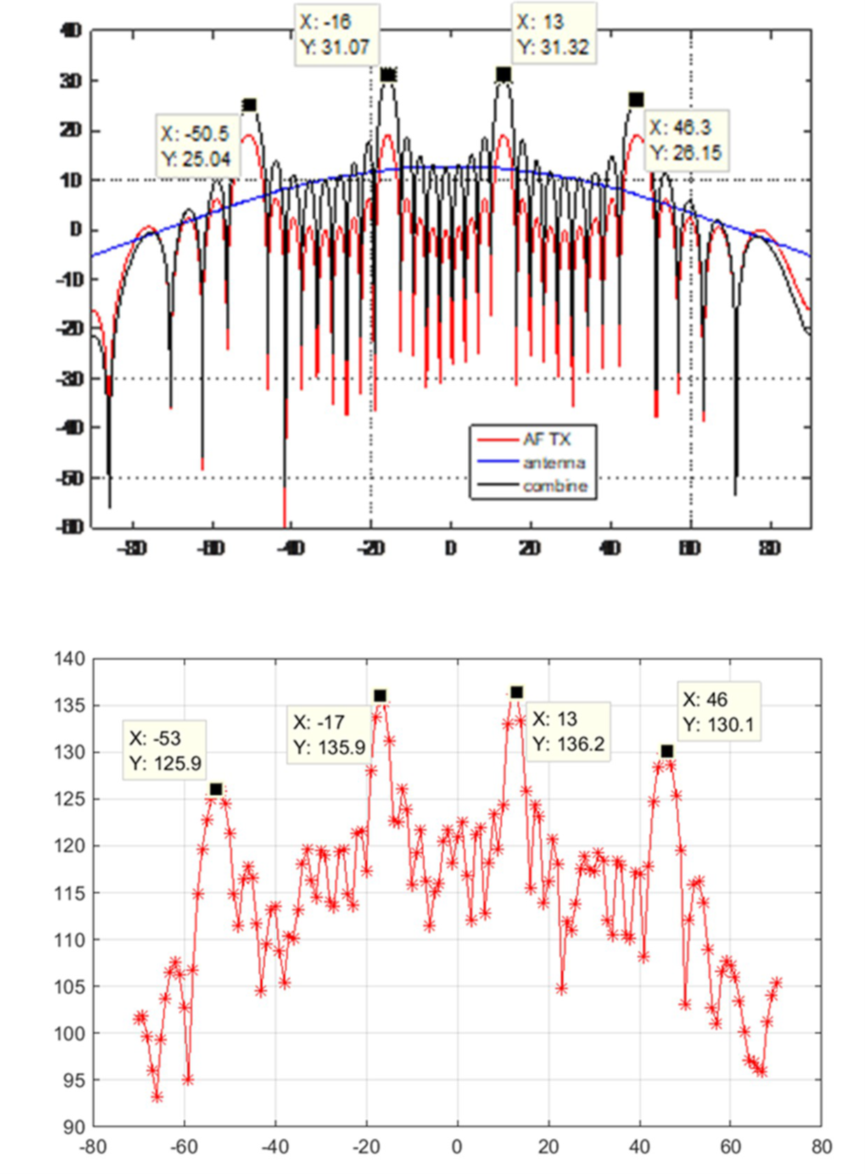
4.2.3.1 实验室波束形成控制方向图??
????????在微波暗室雷达测试距离内进行了基本波束转向测试。一个角反射器放置在距AWR2243雷达传感器约8米的地方。然后将波束导向矢量编程到AWR2243器件中,以实现15度波束旋转。然后将所得的目标回波与角度图与仿真的15度波束旋转方向图进行比较。
????????仿真系统与实测系统之间存在紧密的对准关系。
图29 仿真(上)和测量(下)15度波束转向测试
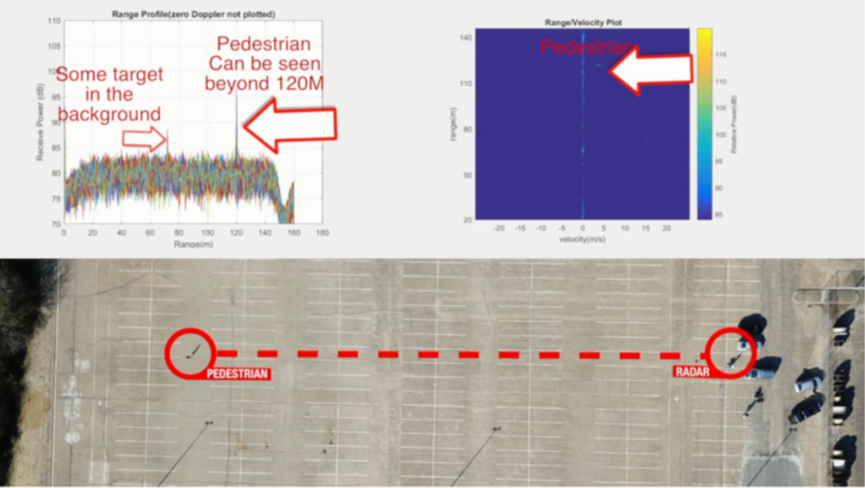
4.2.3.2 行人长距离检测
????????在这个测试中,一个行人从30米慢跑到140米。AWR2243级联射频板工作在9-TX波束成形模式下。距离分布图显示行人在120米处,信噪比为20 dB。多普勒距离图显示在右边。轻微的多普勒位移与行人速度相对应。
图30 距离分布(左上)和行人在120米距离上远离雷达慢跑的多普勒距离图
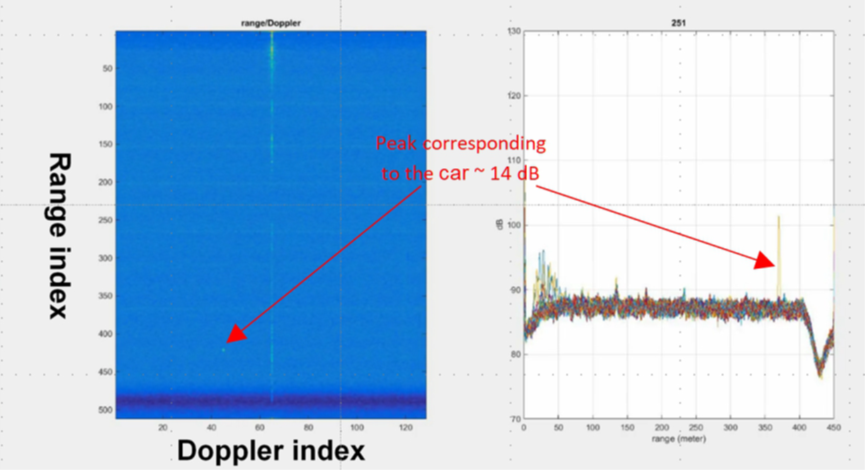
4.2.3.3 汽车长距离检测
????????与行人远程检测测试类似,本测试在350米距离内观察汽车。AWR2243级联射频板工作在9-TX波束成形模式下。
????????距离分布显示车辆在350米处,信噪比为14 dB。
图31 距离分布(左)和车辆在350m的多普勒距离图
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!