基于Pixhawk和ROS搭建自主无人车(二):自动航线篇
发布时间:2024年01月17日
参考
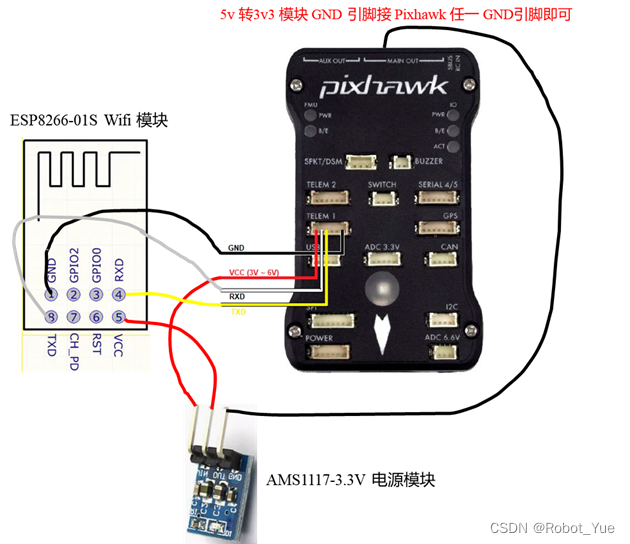
1. 硬件接线一览

2. wifi 模块配置
2.1 wifi 模块接线
- 由于 Pixhawk 采用 5V 电压供电,wifi 模块采用 3v3 电压供电,因此需要一个电压模块进行转接
2.2 固件烧录
本小节所需固件、驱动及软件资料百度网盘链接
- https://pan.baidu.com/s/1s3Y-1kJFQHQYleFTT8VcwA?pwd=0000
-
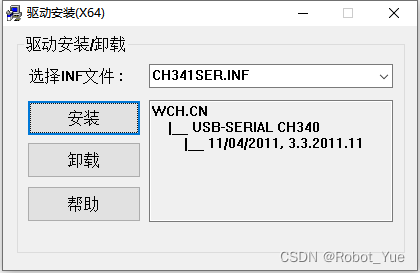
1. 驱动安装
- 双击 CH341SER.EXE 点击安装即可
- 双击 CH341SER.EXE 点击安装即可
-
2. 烧录准备
- 准备 CH340C 下载烧录器进行固件烧录,如下图所示插入电脑 USB 接口

- 准备 CH340C 下载烧录器进行固件烧录,如下图所示插入电脑 USB 接口
-
3. 固件烧录
- 打开 ESP8266Flasher.exe 烧录软件,设置参数如下
- 1. 点击齿轮图标选择网盘中的固件文件 firmware-1.2.2.bin
- 2. 设置波特率为 9600(太高容易烧录失败),其他参数见下图二
- 3. 选择对应 COM 口(可通过电脑设备管理器查看),然后点 Flash 即可
- 注:烧录过程中一定要保证 USB 连接稳固,否则会因电压不稳定导致烧录失败,整个烧录持续 10 分钟左右



- 打开 ESP8266Flasher.exe 烧录软件,设置参数如下
-
4. 结果验证
- 在浏览器地址栏输入 192.168.4.1 会出现如下界面,同时电脑 WiFi 列表中会出现名为 PixRacer 的 WiFi,默认密码为 pixracer,可通过 192.168.4.1 网页查看并修改 Wifi 相关参数

- 在浏览器地址栏输入 192.168.4.1 会出现如下界面,同时电脑 WiFi 列表中会出现名为 PixRacer 的 WiFi,默认密码为 pixracer,可通过 192.168.4.1 网页查看并修改 Wifi 相关参数
3. 自动航线测试
3.1 参数设置
-
打开 QGC 地面站,设置以下参数(本文 wifi 模块使用飞控 TELEM 1口)
- SERIAL1_PROTOCOL = 2 (MAVLink2) or 1 (MAVLink1)
- SERIAL1_BAUD = 921600
- BRD_SER1_RTSCTS = 0(仅在上述两个参数设置后连接失败才设置此参数)
-
在 QGC 地面站软件设置计划视图分栏中,勾选任务不需要起飞项(适用于车船)
3.2 自动航线测试
- 待更新…
文章来源:https://blog.csdn.net/qq_42994487/article/details/135655238
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【无标题】
- [Spring 从模拟开始学习源码]`@Value`的底层实现
- 企业内训系统源码开发实战:搭建实践与经验分享
- ubuntu下使用apache安装zentaocms11.6问题
- 2024年武汉七大员报考条件,企南星
- 使用Python做个可视化的“剪刀石头布”小游戏
- automkcert使用教程
- 【数据湖架构】数据湖101:概述
- kubeadm方式重置k8s集群
- 在Jetson Xavier NX上制作YOLov5.5.0的镜像