ESP32 - Thonny+MicroPython+ESP32 传感器合集
发布时间:2023年12月21日
ESP32 - Thonny+MicroPython+ESP32 外接传感器合集
步进电机
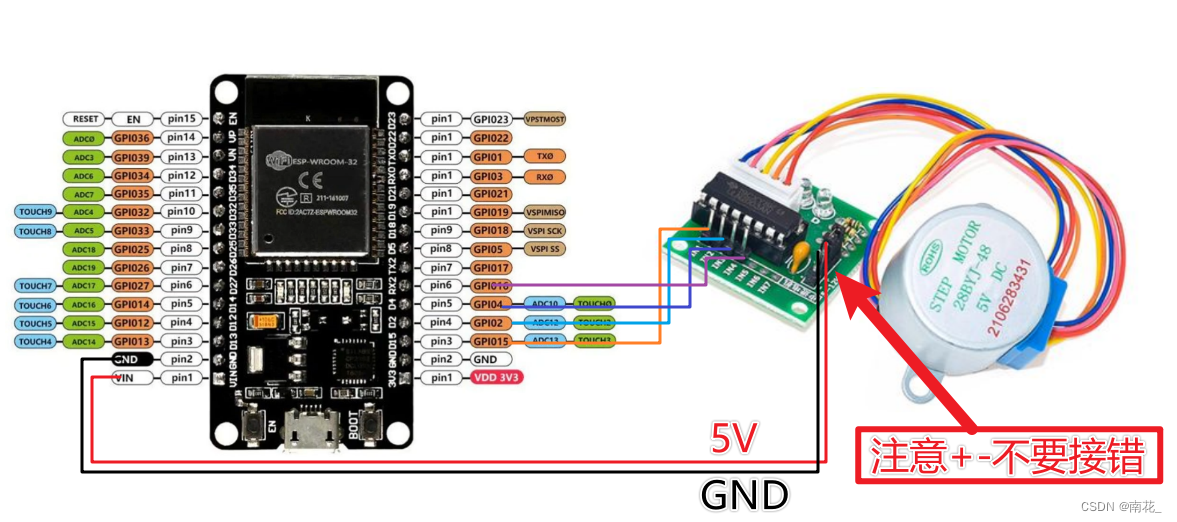
from machine import Pin
import time
a = Pin(15, Pin.OUT)
b = Pin(2, Pin.OUT)
c = Pin(4, Pin.OUT)
d = Pin(16, Pin.OUT)
a.value(0)
b.value(0)
c.value(0)
d.value(0)
delay_time_ms = 2
while True:
a.value(1)
b.value(0)
c.value(0)
d.value(0)
time.sleep_ms(delay_time_ms)
a.value(0)
b.value(1)
c.value(0)
d.value(0)
time.sleep_ms(delay_time_ms)
a.value(0)
b.value(0)
c.value(1)
d.value(0)
time.sleep_ms(delay_time_ms)
a.value(0)
b.value(0)
c.value(0)
d.value(1)
time.sleep_ms(delay_time_ms)
继电器

from machine import Pin
p13 = Pin(13, Pin.OUT)
p13.value(1) # 吸合
# p13.value(0) # 断开
倾斜传感器
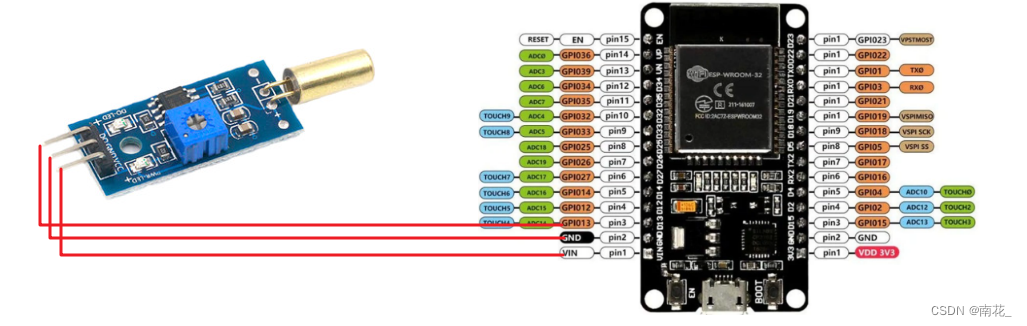
from machine import Pin
import time
p13 = Pin(13, Pin.IN)
while True:
print(p13.value())
time.sleep(0.1)
当倾斜后,程序获取到的GPIO13 的值是0,否则是1
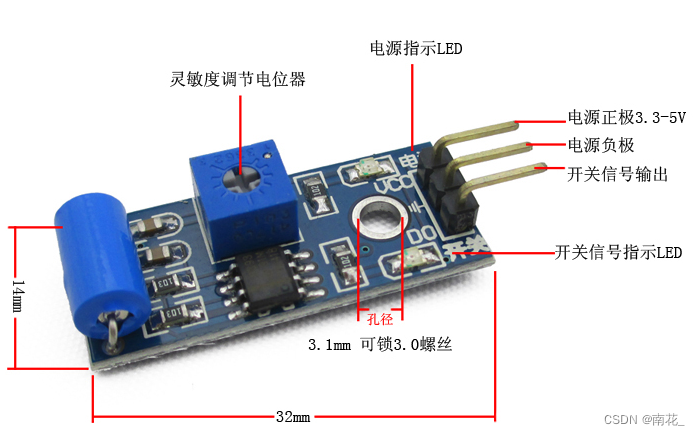
震动报警器
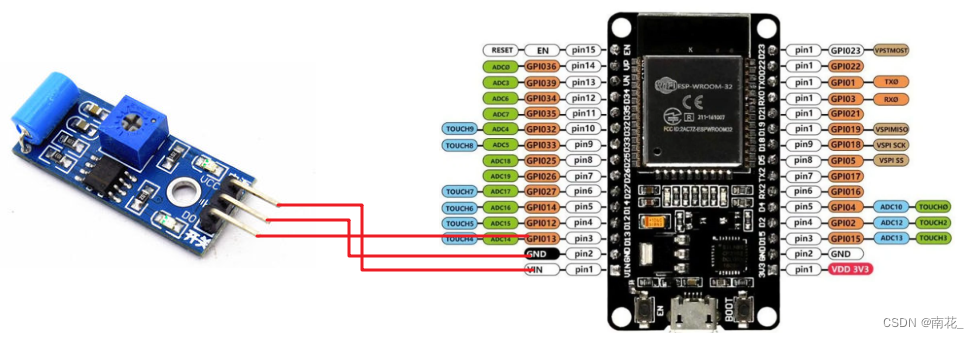
from machine import Pin
import time
# 引脚配置
p13 = Pin(13, Pin.IN)
p2 = Pin(2,Pin.OUT)
while True:
ret = p13.value() # 读取传感器数据
print(ret)
if ret:
for i in range(100): # 通过led闪烁的方式报警
p2.value(1)
time.sleep(0.1)
p2.value(0)
time.sleep(0.1)
time.sleep(0.1)
蜂鸣器(有源、无源)
区别
有源,只需要设置对应引脚为低电平,就会发出声音,且一种音调
from machine import Pin
import time
p15 = Pin(15, Pin.OUT)
for i in range(10):
p15.value(1) # 不响
time.sleep(0.2)
p15.value(0) # 响
time.sleep(0.2)
p15.value(1) # 关闭
无源,需要通过PWM来控制引脚,从而发出不同的音调
from machine import Pin
from machine import PWM
from time import sleep_ms
class BUZZER:
def __init__(self, sig_pin):
self.pwm = PWM(Pin(sig_pin, Pin.OUT))
def play(self, melodies, wait, duty):
for note in melodies:
print("note:{}".format(note))
if note:
self.pwm.freq(note)
self.pwm.duty(duty)
sleep_ms(wait)
# 暂停PWM,将占空比设置为0
self.pwm.duty(0)
# 音符与对应的的频率
B0 = 31
C1 = 33
CS1 = 35
D1 = 37
DS1 = 39
E1 = 41
F1 = 44
FS1 = 46
G1 = 49
GS1 = 52
A1 = 55
AS1 = 58
B1 = 62
C2 = 65
CS2 = 69
D2 = 73
DS2 = 78
E2 = 82
F2 = 87
FS2 = 93
G2 = 98
GS2 = 104
A2 = 110
AS2 = 117
B2 = 123
C3 = 131
CS3 = 139
D3 = 147
DS3 = 156
E3 = 165
F3 = 175
FS3 = 185
G3 = 196
GS3 = 208
A3 = 220
AS3 = 233
B3 = 247
C4 = 262
CS4 = 277
D4 = 294
DS4 = 311
E4 = 330
F4 = 349
FS4 = 370
G4 = 392
GS4 = 415
A4 = 440
AS4 = 466
B4 = 494
C5 = 523
CS5 = 554
D5 = 587
DS5 = 622
E5 = 659
F5 = 698
FS5 = 740
G5 = 784
GS5 = 831
A5 = 880
AS5 = 932
B5 = 988
C6 = 1047
CS6 = 1109
D6 = 1175
DS6 = 1245
E6 = 1319
F6 = 1397
FS6 = 1480
G6 = 1568
GS6 = 1661
A6 = 1760
AS6 = 1865
B6 = 1976
C7 = 2093
CS7 = 2217
D7 = 2349
DS7 = 2489
E7 = 2637
F7 = 2794
FS7 = 2960
G7 = 3136
GS7 = 3322
A7 = 3520
AS7 = 3729
B7 = 3951
C8 = 4186
CS8 = 4435
D8 = 4699
DS8 = 4978
# 第一首,超级马里奥乐谱
mario = [
E7, E7, 0, E7, 0, C7, E7, 0,
G7, 0, 0, 0, G6, 0, 0, 0,
C7, 0, 0, G6, 0, 0, E6, 0,
0, A6, 0, B6, 0, AS6, A6, 0,
G6, E7, 0, G7, A7, 0, F7, G7,
0, E7, 0, C7, D7, B6, 0, 0,
C7, 0, 0, G6, 0, 0, E6, 0,
0, A6, 0, B6, 0, AS6, A6, 0,
G6, E7, 0, G7, A7, 0, F7, G7,
0, E7, 0, C7, D7, B6, 0, 0,
]
# 第二首,jingle bells
jingle = [
E7, E7, E7, 0,
E7, E7, E7, 0,
E7, G7, C7, D7, E7, 0,
F7, F7, F7, F7, F7, E7, E7, E7, E7, D7, D7, E7, D7, 0, G7, 0,
E7, E7, E7, 0,
E7, E7, E7, 0,
E7, G7, C7, D7, E7, 0,
F7, F7, F7, F7, F7, E7, E7, E7, G7, G7, F7, D7, C7, 0
]
# 初始化蜂鸣器对象
buzzer = BUZZER(15)
print("播放 超级马里奥")
buzzer.play(mario, 150, 512)
sleep_ms(1000)
print("播放 jingle bells.")
buzzer.play(jingle, 250, 512)
sleep_ms(1000)
光敏传感器
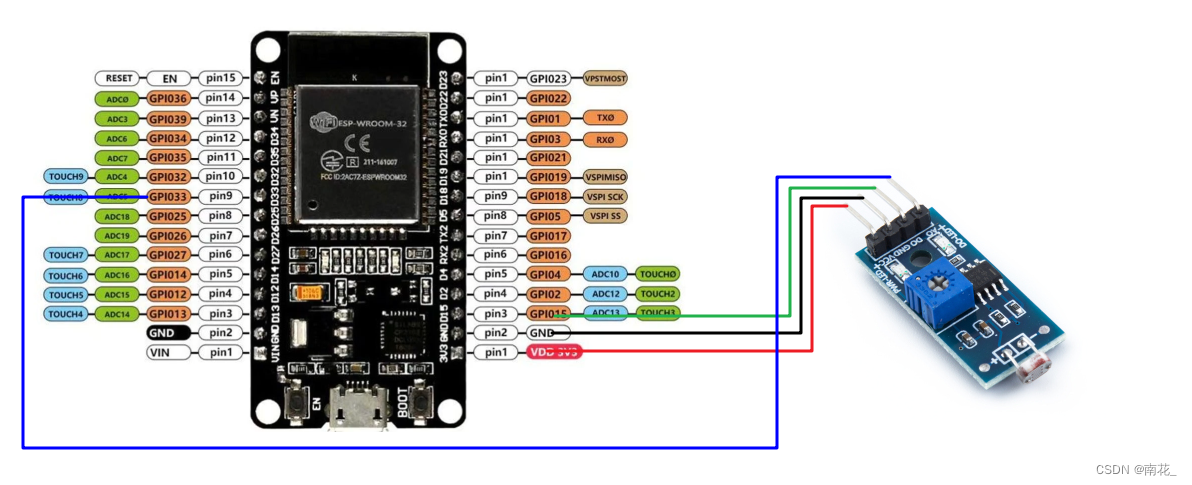
from machine import Pin, ADC
import time
# 模拟量
ps2_y = ADC(Pin(33))
ps2_y.atten(ADC.ATTN_11DB) # 这里配置测量量程为3.3V
# 数字量
p15 = Pin(15, Pin.IN)
# 循环检测
while True:
val_y = ps2_y.read() # 0-4095
light = p15.value()
print(val_y, light)
time.sleep(0.1)
文章来源:https://blog.csdn.net/weixin_45813438/article/details/135110247
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Self-correcting LLM-controlled Diffusion Models
- python统计分析——协方差和pearson相关系数
- 使用 KVM 管理程序优化虚拟化
- 15个必知的Mysql索引失效场景,别再踩坑了!
- 14.4K Star,再见 Navicat,我选择这个开源工具
- 【win】Windows下MSI Afterburner如何让其不在某个软件中显示帧数
- SpringBoot中使用LocalDateTime踩坑记录
- MapReduce基础编程
- Js面试之数据类型相关
- springboot发送邮件,内容使用thymeleaf模板引擎排版