超维空间S2无人机使用说明书——41、使用3维雷达进行室内定位——仿真篇(跑数据集)
发布时间:2023年12月24日
引言:为了提高无人机室内定位的稳定性和多种定位方案,S系列无人机推出了基于三维雷达激光点云数据的定位方案。该方案的提出是为了改善视觉定位容易受到光照等影响导致的位置漂移。
简介
定位采用fast-lio定位算法,通过修改源码直接发布定位出来的位置信息和速度等信息。该算法主要依赖CPU的运算速度,因此需要选择合适的主控进行开发即可。
硬件:宇树雷达4DLiDAR L1 PM,ROS主控Jetson orin nano 8G
环境:ubuntu20.04,ros-noetic
步骤一: 启动fast-lio定位算法
roslaunch fast_lio mapping_velodyne.launch

等待出现如下界面,表明启动成功

同时会自动开启RVIZ,如下
步骤二:播放数据集
注意:需要到对应数据集目录下再进行如下指令操作,我的数据集在home目录下
rosbag play demo01_velodyne.bag

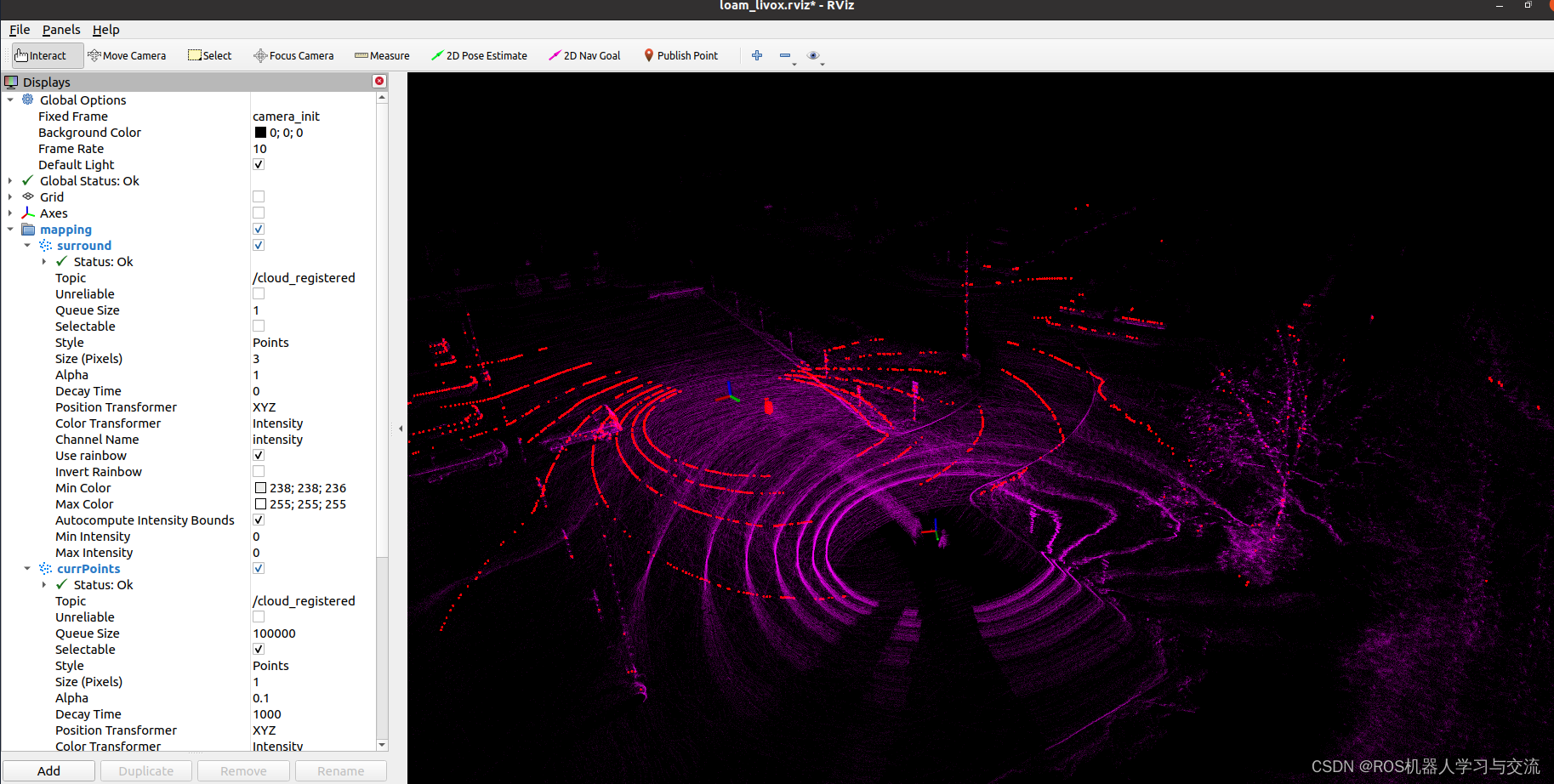
步骤三:查看RVIZ中的激光点云图
步骤四:查看定位出来的里程计信息
(1)、查看里程计话题名称
rostopic list
话题/Odometry就是雷达定位出来的里程计话题
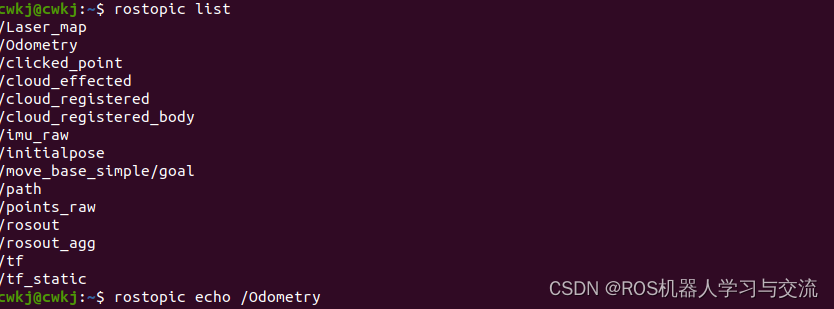
(2)、打印里程计数据
rostopic echo /Odometry

总结:一般来说仿真数据集正常运行,表明环境配置正常。在下一小节中,我们只需要给出正确的激光scan数据即可。
建议,在不熟悉算法的情况下,最好是先进行仿真,在熟悉了流程以后在进行实物的操作,既提高了学习效率,也可以避免硬件的损坏
文章来源:https://blog.csdn.net/qq_35598561/article/details/135181110
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 掌握Shell脚本编程:从入门到精通
- 赋能智慧农业生产,基于YOLOv3开发构建农业生产场景下油茶作物成熟检测识别系统
- 【Java SE语法篇】11.异常
- BART论文解读:BERT和GPT结合起来会发生什么?
- 【sed学习】sed -i和sed -i -e有什么区别
- 精准核酸检测 - 华为OD统一考试
- SpringBoot的日志管理
- 【C语言】结构体对齐计算方式
- CMake(一):构建一个工程
- springboot/java/php/node/python办公室资产登记系统【计算机毕设】