[足式机器人]Part2 Dr. CAN学习笔记 - Ch02动态系统建模与分析
本文仅供学习使用
本文参考:
B站:DR_CAN
Dr. CAN学习笔记 - Ch02动态系统建模与分析
1. 课程介绍

2. 电路系统建模、基尔霍夫定律
基本元件:
电量 库伦(
C
C
C)
q
q
q
电流 安培(
A
A
A)
i
i
i ——
i
=
d
e
d
t
i=\frac{\mathrm{d}e}{\mathrm{d}t}
i=dtde? 流速
电压 伏特(
V
V
V)
e
e
e
电阻 欧姆(
Ω
\varOmega
Ω)
R
R
R ——
e
R
=
i
R
e_{\mathrm{R}}=iR
eR?=iR
电容 法拉(
F
F
F)
C
C
C ——
q
=
C
e
C
,
e
C
=
1
C
q
=
1
C
∫
0
t
i
d
t
q=Ce_{\mathrm{C}},e_{\mathrm{C}}=\frac{1}{C}q=\frac{1}{C}\int_0^t{i}\mathrm{d}t
q=CeC?,eC?=C1?q=C1?∫0t?idt
电感 亨利(
H
H
H)
L
L
L ——
e
L
=
L
d
i
d
t
=
L
i
′
e_{\mathrm{L}}=L\frac{\mathrm{d}i}{\mathrm{d}t}=Li^{\prime}
eL?=Ldtdi?=Li′

基尔霍夫定律
K(Kirchhoff) C(Current) L(Law) —— 所有进入某节点的电流的总和等于所有离开这个节点的的电流总和
K(Kirchhoff) V(Voltage) L(Law) —— 沿着闭合回路所有元件两端的电压的代数和等于零

 )
)
3. 流体系统建模

流量 flow rate
q
q
q
m
3
/
s
m^3/s
m3/s
体积 volume
V
V
V
m
3
m^3
m3
高度 heigh
h
h
h
m
m
m
压强 pressure
p
p
p
N
/
m
(
p
a
s
c
a
l
)
N/m\left( pascal \right)
N/m(pascal)
静压 Hydrostatic Pressure
p
H
y
d
r
o
=
F
H
y
d
r
o
A
=
m
g
A
=
ρ
g
h
p_{\mathrm{Hydro}}=\frac{F_{\mathrm{Hydro}}}{A}=\frac{mg}{A}=\rho gh
pHydro?=AFHydro??=Amg?=ρgh
绝对压强 Asolute Pressure
p
a
b
s
=
p
a
+
p
H
y
d
r
o
=
p
a
+
ρ
g
h
p_{abs}=p_{\mathrm{a}}+p_{\mathrm{Hydro}}=p_{\mathrm{a}}+\rho gh
pabs?=pa?+pHydro?=pa?+ρgh
表压 Gauge Pressure
P
g
a
u
g
e
=
p
a
b
s
?
p
a
=
ρ
g
h
P_{\mathrm{gauge}}=p_{abs}-p_{\mathrm{a}}=\rho gh
Pgauge?=pabs??pa?=ρgh
流阻 Fluid Resistance

质量守恒 Conservation of Mass

4. 拉普拉斯变换(Laplace)传递函数、微分方程
4.1 Laplace Transform 拉式变换
f
(
t
)
→
F
(
s
)
f\left( t \right) \rightarrow F\left( s \right)
f(t)→F(s) : 时域 - 频域
s
=
σ
+
j
w
s=\sigma +jw
s=σ+jw





4.2 收敛域(ROC)与逆变换(ILT)


微分方程——描述动态世界
状态变量 :
d
x
?
d
t
\frac{\mathrm{d}\vec{x}}{\mathrm{d}t}
dtdx?-时间
位移:
s
s
s , 速度:
d
x
d
t
\frac{\mathrm{d}x}{\mathrm{d}t}
dtdx? ,加速度:
d
2
x
d
t
2
\frac{\mathrm{d}^2x}{\mathrm{d}t^2}
dt2d2x?
- F = m d 2 x d t 2 F=m\frac{\mathrm{d}^2x}{\mathrm{d}t^2} F=mdt2d2x?
- d T d t = ? k ( T ? C ) \frac{\mathrm{d}T}{\mathrm{d}t}=-k\left( T-C \right) dtdT?=?k(T?C)
- d P d t = ? r p ( 1 ? p k ) \frac{\mathrm{d}P}{\mathrm{d}t}=-rp\left( 1-\frac{p}{k} \right) dtdP?=?rp(1?kp?) 人口增长
常系数线性 —— 线性时不变系统
- 求解 3Step
从 t t t— s s s L [ f ( t ) ] \mathcal{L} \left[ f\left( t \right) \right] L[f(t)]
运算求解
从 s s s— t t t L ? 1 [ F ( s ) ] \mathcal{L} ^{-1}\left[ F\left( s \right) \right] L?1[F(s)]
非线性
- 线性化
- 非线性分析控制

4.3 传递函数 Transfer Function
——根轨迹 BodePlot 信号处理


5. 一阶系统的单位阶跃响应(step response),时间常数(Time Constant)

换个角度分析单位阶跃响应(System Unit Step Response - 一阶 1st order)——LTI
一阶线性时不变 —— 1st order LTI
x
˙
+
a
x
=
a
u
x
(
0
)
=
x
˙
(
0
)
=
0
\dot{x}+ax=au \\ x\left( 0 \right) =\dot{x}\left( 0 \right) =0
x˙+ax=aux(0)=x˙(0)=0
传递函数 : s X ( s ) + a X ( s ) = a U ( s ) ; H ( s ) = X ( s ) U ( s ) = a s + a sX\left( s \right) +aX\left( s \right) =aU\left( s \right) ;H\left( s \right) =\frac{X\left( s \right)}{U\left( s \right)}=\frac{a}{s+a} sX(s)+aX(s)=aU(s);H(s)=U(s)X(s)?=s+aa?

Another Viewpoint :
x
˙
+
a
x
=
a
u
,
t
?
0
,
u
=
1
?
x
˙
=
a
?
a
x
=
a
(
1
?
x
)
\dot{x}+ax=au,t\geqslant 0,u=1\Rightarrow \dot{x}=a-ax=a\left( 1-x \right)
x˙+ax=au,t?0,u=1?x˙=a?ax=a(1?x)

6. 频率响应与滤波器




1st order system 一阶系统

低通滤波器——Loss Pass Filter

7. 二阶系统
7.1 二阶系统对初始条件的动态响应 Matlab/Simulink - 2nd Order Syetem Response to IC
Vibration 振动



7.2 二阶系统的单位阶跃响应 2nd Order System Unit Step Response

Unit Step Imput 单位阶跃


7.3 二阶系统单位阶跃的性能分析与比较 2nd Order System Unit Step Response


7.4 共振现象-二阶系统频率响应,现象部分

7.5 二阶系统的频率响应

8. 二阶系统的频率响应

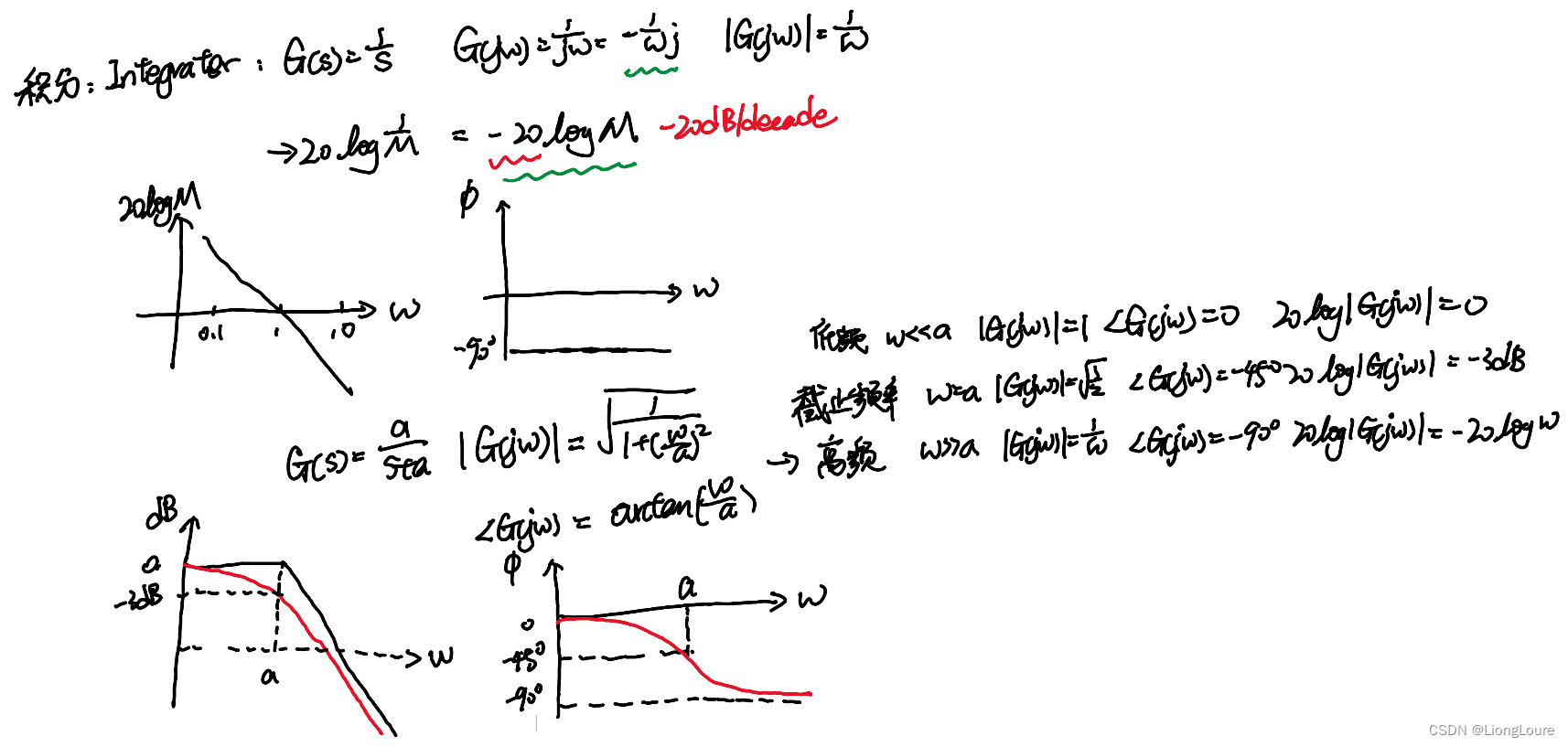
Bode Plot 手绘技巧与应用


本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- python的介绍,带入,安装
- unity c# base64 解码
- android 源码编译
- 【Py/Java/C++三种语言详解】LeetCode每日一题240110【栈】LeetCode2696、删除子串后的字符串最小长度
- Java-异常
- Nature | 化学领域的ChatGPT:人工智能与机器人联合打造新材料
- 解读 - 新加坡发布《关于在人工智能推荐和决策系统中使用个人数据的咨询指南》
- 基于VUE框架的旅游平台-随心-计算机毕业设计源码82070
- 基于linux系统的Tomcat+Mysql+Jdk环境搭建(一)vmare centos7 设置静态ip和连接MobaXterm
- 群联高防IP:打造无懈可击的网络安全防线